

Методические указания по выполнению др
Оформление ДР
ДР должна быть оформлена а в соответствии с требованиями Стандарта предприятия СТП МГУПИ 2068752-5-2006.
2.1 Пояснительная записка.
Объем пояснительной записки 15 - 20 стр.
Структура пояснительной записки:
- титульный лист;
- содержание;
- введение;
- техническое задание;
- выбор и обоснование функциональной и принципиальной схем, расчет
основных параметров системы и ее элементов;
- описание работы системы;
- расчет и анализ погрешностей;
- заключение;
- список использованных источников.
2.2 Графическая часть.
Графическая часть должна включать принципиальную схему электронного блока.
Обозначения в графической части должны выполняться в соответствии с действующими Государственными стандартами ГОСТ 2.701-84, 2.702-75, 2.708-81, ГОСТ 2.710-81, 2.730-73, 2.743-91, 2.759-82.
3 Содержание разделов пояснительной записки
Введение должно содержать обоснование актуальности решаемой в проекте задачи и указание областей, в которых разрабатываемая система может быть использована.
В техническом задании необходимо привести основные параметры проектируемой системы (в соответствии с заданием на курсовой проект): контролируемый параметр, диапазон изменения, допустимые значения параметра, допустимая погрешность измерения, форма представления выходной информации.
Выбор функциональной схемы обусловлен используемым датчиком контролируемого параметра. Для питания электронных узлов система должна содержать выпрямитель со стабилизатором напряжения.
Поскольку электронный блок конструктивно располагается на одной печатной плате, на его принципиальной схеме такие элементы системы как датчики, цифровые индикаторы, силовой трансформатор, не указываются. Связь с этими элементами осуществляется посредством разъемов.
В разделе "Заключение" делаются выводы о соответствии спроектированного комплекса требованиям технического задания в отношении основных параметров.
4 Рекомендуемая последовательность выполнения работы
4.1 Обосновать выбор датчика с учетом исходных данных.
4.2 Выбрать измерительную схему.
4.3 Составить функциональную схему системы.
4.4 Рассчитать и построить выходную характеристику измерительного преобразователя.
4.5 Составить принципиальную электрическую схему электронного блока.
4.6 Рассчитать погрешность измерения.
Варианты заданий на расчетно-графическую работу
1 Индуктивный датчик
Вариант |
Площадь зазора F (мм2) |
Число витков w |
Сопротивл. обмотки R(Ом) |
Напряжение U~ (В) |
Частота f (кГц) |
Макс.биение Аmax (мкм) |
Погрешн. δ % |
Частота вращ. Ω (с-1) |
1 |
50 |
3000 |
300 |
2 |
2 |
100 |
1 |
5 |
2 |
40 |
4000 |
400 |
3 |
2,5 |
200 |
1 |
3 |
3 |
100 |
5000 |
500 |
4 |
3 |
500 |
0,5 |
4 |
4 |
80 |
6000 |
600 |
5 |
3,5 |
500 |
1 |
6 |
5 |
60 |
3500 |
350 |
2,5 |
4 |
400 |
0,5 |
2 |
6 |
70 |
4500 |
450 |
3,5 |
4,5 |
80 |
0,5 |
5 |
7 |
50 |
5500 |
550 |
4,5 |
5 |
100 |
1,5 |
4 |
8 |
80 |
4000 |
400 |
2 |
2,2 |
150 |
2 |
1 |
9 |
90 |
5000 |
500 |
3 |
4,4 |
220 |
2,5 |
2 |
10 |
60 |
3000 |
600 |
5 |
5,6 |
50 |
5 |
3 |
11 |
70 |
2500 |
200 |
4 |
4 |
300 |
2 |
4 |
12 |
80 |
3000 |
300 |
4 |
5 |
200 |
1 |
5 |
13 |
40 |
2000 |
100 |
3 |
5 |
100 |
2 |
8 |
14 |
50 |
2500 |
120 |
4 |
4 |
120 |
2,5 |
7 |
15 |
60 |
3000 |
200 |
5 |
3 |
140 |
1 |
6 |
16 |
70 |
4000 |
250 |
3 |
2 |
150 |
1,5 |
5 |
17 |
80 |
4500 |
300 |
4 |
2 |
200 |
2 |
4 |
18 |
90 |
5000 |
400 |
5 |
2 |
100 |
1 |
3 |
Проектирование прибора с индуктивным датчиком
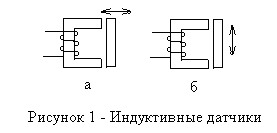
Индуктивный преобразователь представляет собой катушку с ферромагнитным сердечником с изменяющимся воздушным зазором d (рисунок1а) или с изменяющейся площадью F поперечного сечения магнитопровода (рисунок 1б). Выходным параметром является значение индуктивности L (или полное сопротивление Z) обмотки, надетой на сердечник.
Индуктивность катушки с магнитопроводом из ферромагнитного материала определяется выражением:

где L - индуктивность, Гн;
w – число витков катушки;
Rж, Ro – магнитные сопротивления сердечника и воздушного зазора;
lж – средняя длина магнитной силовой линии в магнитопроводе;
µ, µо – магнитные проницаемости материала сердечника и воздушного зазора;
F, Fo – площади сечения сердечника и воздушного зазора, м2;
δ - величина воздушного зазора, м;
µ0 = 1,257 * 10-6 В * с / (А * м)
При зазорах величиной более 0,2…0,5 мм магнитное сопротивление воздушного зазора много больше сопротивления сердечника (Ro >> Rж). Тогда формула (1) примет вид:
![]()
Сопротивление катушки определяется выражением:
 Z = √ R2
+ ω2L2
,
(3)
Z = √ R2
+ ω2L2
,
(3)
где R – активное сопротивление провода, Ом
ω – круговая частота питающего напряжения.
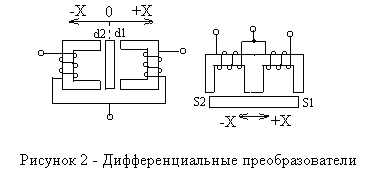
Для получения широкого линейного участка характеристики применяют дифференциальные преобразователи. Такой преобразователь имеет две катушки с двумя магнитными цепями и с общим якорем. В преобразователе с переменным зазором при перемещении якоря зазор одной магнитной цепи увеличивается, а другой – уменьшается на такую же величину. Соответственно изменяются и сопротивления катушек. В преобразователе с переменной площадью таким же образом изменяются действующие площади магнитных цепей.
Схемы таких преобразователей показаны на рисунке 2.
В качестве измерительной схемы прибора с индуктивными преобразователями обычно используют симметричные мостовые схемы переменного тока.
Выбор типа датчика
При перемещениях X < 2 мм следует использовать датчик с переменным зазором, имеющий в этом диапазоне более высокую чувствительность и удовлетворительную линейность характеристики Z = Z(X).
При больших перемещениях ( до 5…8 мм) целесообразнее использовать датчик с
переменной площадью, имеющий большую линейность.
Выбор измерительной схемы
Основными измерительными схемами индуктивных приборов для линейных
измерений являются симметричные мостовые схемы переменного тока. В этих схемах легко использовать дифференциальные преобразователи, катушки которых включают в два смежных плеча мостовой схемы, а два других плеча образованы резисторами. Такая схема показана на рисунке 3.
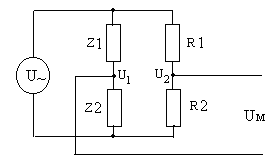
Рисунок 3 – Мостовая схема включения датчика
Расчет выходной характеристики датчика
Выходной характеристикой индуктивного датчика является зависимость
Z = Z(X), (4)
где Z - сопротивление катушки переменному току (Ом), X – величина перемещения якоря.
Для определения начального значения сопротивления Zo при X = 0 необходимо выбрать начальный зазор между якорем и сердечником катушки из условия dо > Xmax, где Xmax – максимальная величина перемещения якоря в датчиках с переменным зазором ( в соответствии с заданным диапазоном измерения). В датчиках с переменной площадью зазор может быть выбран равным 0,5 … 1 мм. Расчет Zo производится по формулам (2) и (3).
Задавая значения зазора в пределах dо - Xmax … dо + Xmax, рассчитывают
соответствующие значения Z и строят зависимость (4) для датчика с переменным зазором.
Для датчика с переменной площадью выбирают начальное значение активной площади сечения Fo = F/2, где F – заданная величина сечения сердечника, и, задавая величину X в диапазоне - Xmax ... + Xmax и определяя соответствующие значения активного сечения магнитопровода (считая сечение сердечника квадратным), рассчитывают значения Z.
В области начального зазора (Х=0) определяют чувствительность датчика:
Sд = ΔZ / ΔX (5)