

Кодовые диски
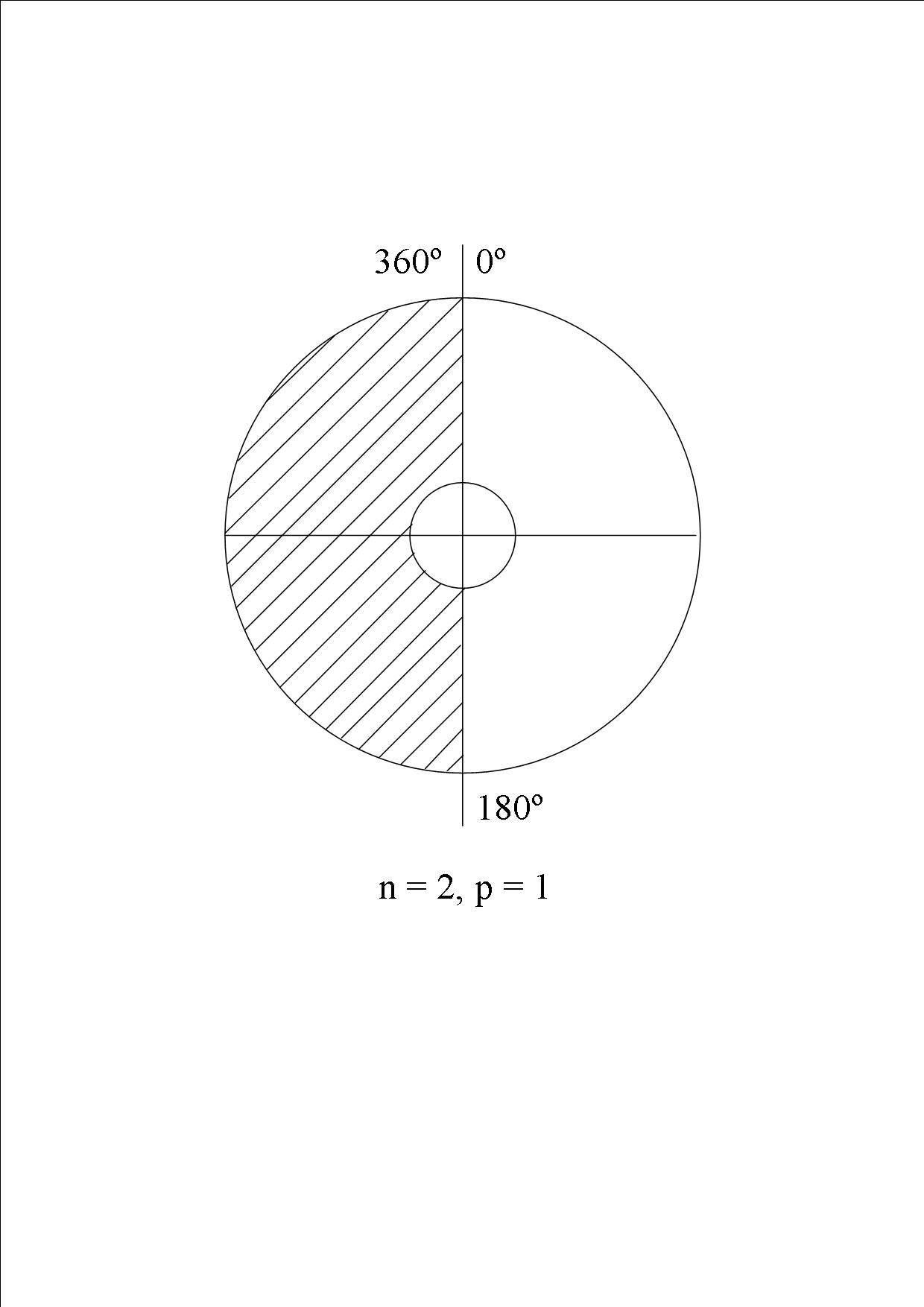
При кодировании угол на лимбе обозначается сочетанием равных белых прозрачных и непрозрачных полос соответствующих двум знакам двоичного кода. При просвечивании таких полей возникают два сигнала комбинации которых позволяют получить значение направления.
Так,
например, для определения направления
на лимбе с интервалами в 180° его (лимб)
делят на два сектора прозрачный и
непрозрачный. Тогда при просвечивании
свет будет обозначать, что направление
лежит в секторе 0 -180°, а отсутствие света
покажет на сектор 180° - 360°. Фото –
электрическое устройство поможет
получить соответствующий сигнал для
дальнейшей обработки. В этом простейшем
случае направление определится с
точностью в 180°. Возможные направления
А – 1 и А – 2 соответствующие одному из
сигналов, лежат в секторе величиной в
180°. При делении окружности на n
частей погрешность ∆
определится
из равенства:

Двух
обозначений как это было для
 для
для
 недостаточно, и должна быть образована
система из знаков – разряды. Каждый
разряд на лимбе представлен кодовой
дорожкой – кольцом из полей. Необходимое
число комбинаций из двух знаков, один
из которых 0, а другой 1 , составит
недостаточно, и должна быть образована
система из знаков – разряды. Каждый
разряд на лимбе представлен кодовой
дорожкой – кольцом из полей. Необходимое
число комбинаций из двух знаков, один
из которых 0, а другой 1 , составит
 ,
где p
– число разрядов. Потребуется число
разрядов
,
где p
– число разрядов. Потребуется число
разрядов

Поскольку погрешность обозначения направления в градусной мере.
;

Величина ∆ одновременно представляет и цену наименьшего деления лимба.
Так, например величину ∆ близкую к 1", даст лимб с 20 – разрядным кодовым построением (20 кодовых дорожек). Для записи в этом случае значения направления потребуется 20 двоичных цифр – знаков. При автоматической обработке информации это осложнений не вызывает.

Муаровый эффект
Если взять непрозрачную пластину или круг и нанести на них ряд параллельных штрихов равноотстоящих друг от друга. Эта пластина или круг называются «растром». Если вторую прозрачную пластину с точно такими же штрихами, «решетку» или подвижный «растр» наложим на первую и повернём на некоторый малый угол ω. То при этом штрихи растров пересекутся. Если точки пересечения штрихов растров соединить прямыми линиями, то они будут расположены по направлению биссектрисы тупого угла пересечения растров. Между этими линиями штрихи прозрачной пластины будут закрывать промежутки между штрихами неподвижного растра, и появятся тёмные полосы, параллельные линиям, соединяющим пересечения штрихов растров. Эти тёмные полосы называются «муаровыми».
Штрихи на лимбах обыкновенно делаются светло – белыми на темной поверхности лимба. Расстояние между полосами, а называется шагом полос, а расстояние между муаровыми полосами d шагом муаровых или полос, величина которого определяется уравнением:

Диск с растром закреплённый на лимбе и решётка закреплённая на алидаде, обеспечивают муаровый эффект. При вращении алидады муаровые полосы смещаются почти поперёк считывающей решетки и могут быть подсчитаны счётчиком в электронном блоке. Повороту алидады на величину, а соответствует смещение полосы на величину d которую можно разделить (интерполировать) на несколько частей и таким образом увеличить точность считывания. Муаровый эффект можно использовать и с применением растров с разным шагом. Что широко используется в электронных тахеометрах для увеличения точности отсчитывания.
В электронном тахеометре ТаЗМ для измерения углов применён растровый датчик накопительного типа. В качестве датчика угла применён фотоэлектрический преобразователь угол – код. Рабочей мерой преобразователя служит лимб. Участок лимба (≈100 штрихов) проецируется оптическим мостиком с увеличением 1,01 на диаметрально противоположный участок, что создаёт муаровую картину, проецируемую на фотоприёмник. Сигнал с фотоприёмника поступает в электронную часть датчика угла, состоящую из каналов грубого и точного отсчётов.
Канал грубого отсчёта подсчитывает количество муаровых полос, соответствующее углу поворота алидады горизонтального круга.
В канале точного отсчёта применён фазовый интерполятор, разбивающий муаровые полосы на части соответствующие точности инструмента. Сформированный код измеряемого угла поступает в микро – ЭВМ и выдаётся на табло в виде преобразованного в десятичную систему величины угла.