Расчет магнитных муфт
Задача. Рассчитать и построить зависимость магнитного момента от угла поворота ротора магнитной муфты с постоянными магнитами с осевой намагниченностью (использовать программу Jump). Построить аппроксимацию этой зависимости синусом.
Расчет электромеханической системы с магнитной муфтой
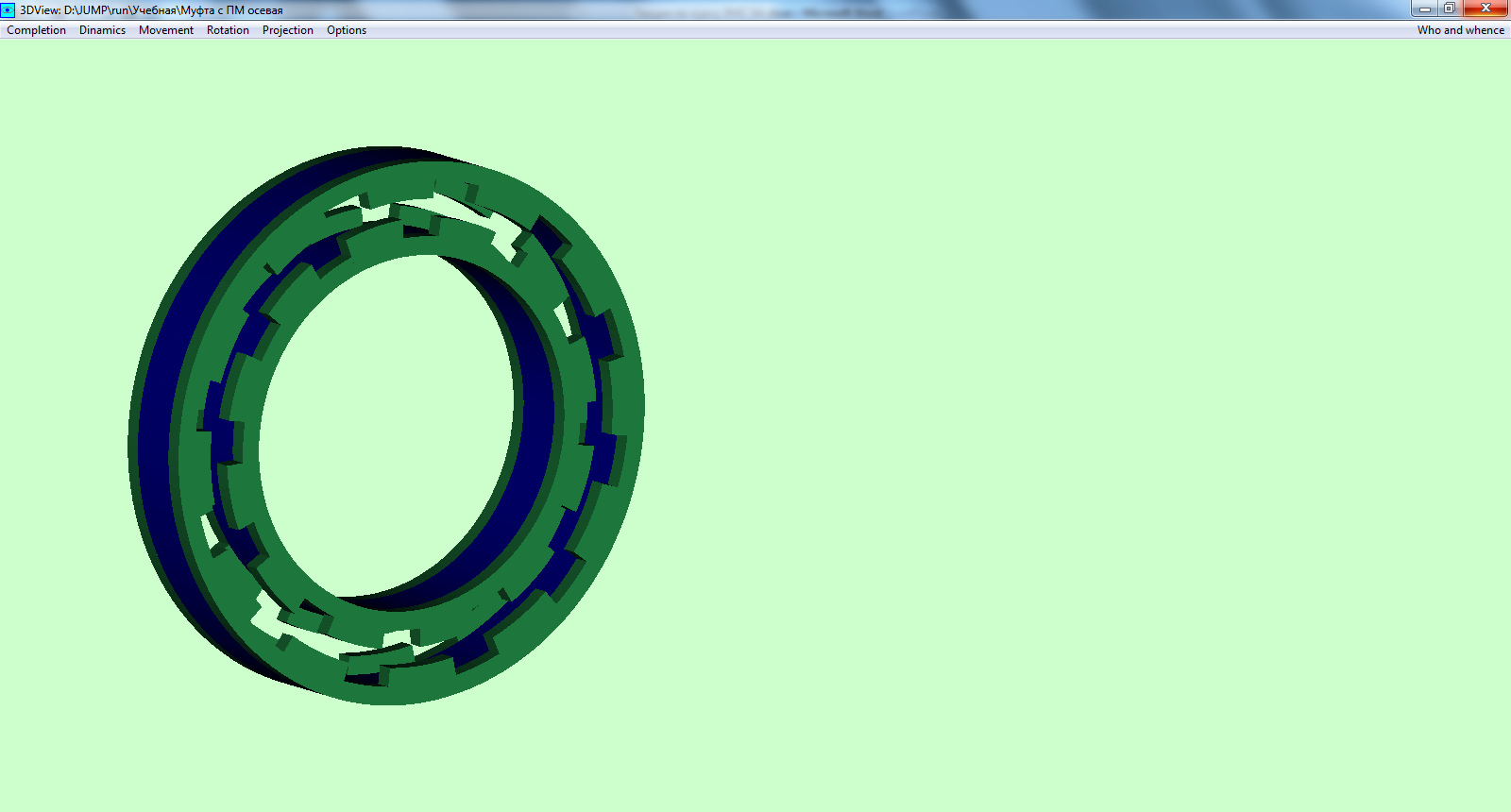
Компьютерная модель магнитной муфты с осевой намагниченностью в программе Jump
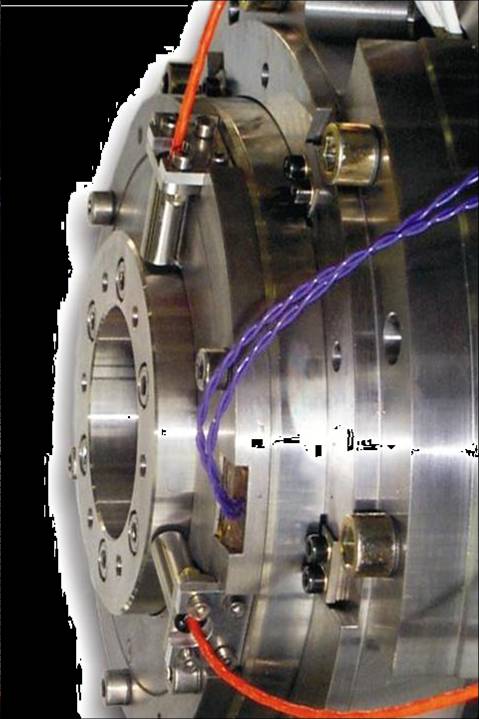
Магнитная муфта с постоянными магнитами
1.Рассчитать зависимость момента магнитной от угла и ее аппроксимации. синусом
2. Рассчитать процесс запуска механизма: асинхронный двигатель, магнитная муфта, нагрузка. Построить зависимости от времени скоростей ведущей и ведомой частей механизма.
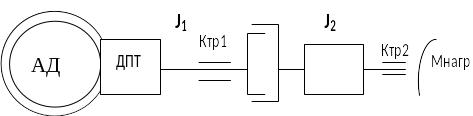
Кинематическая схема механизма
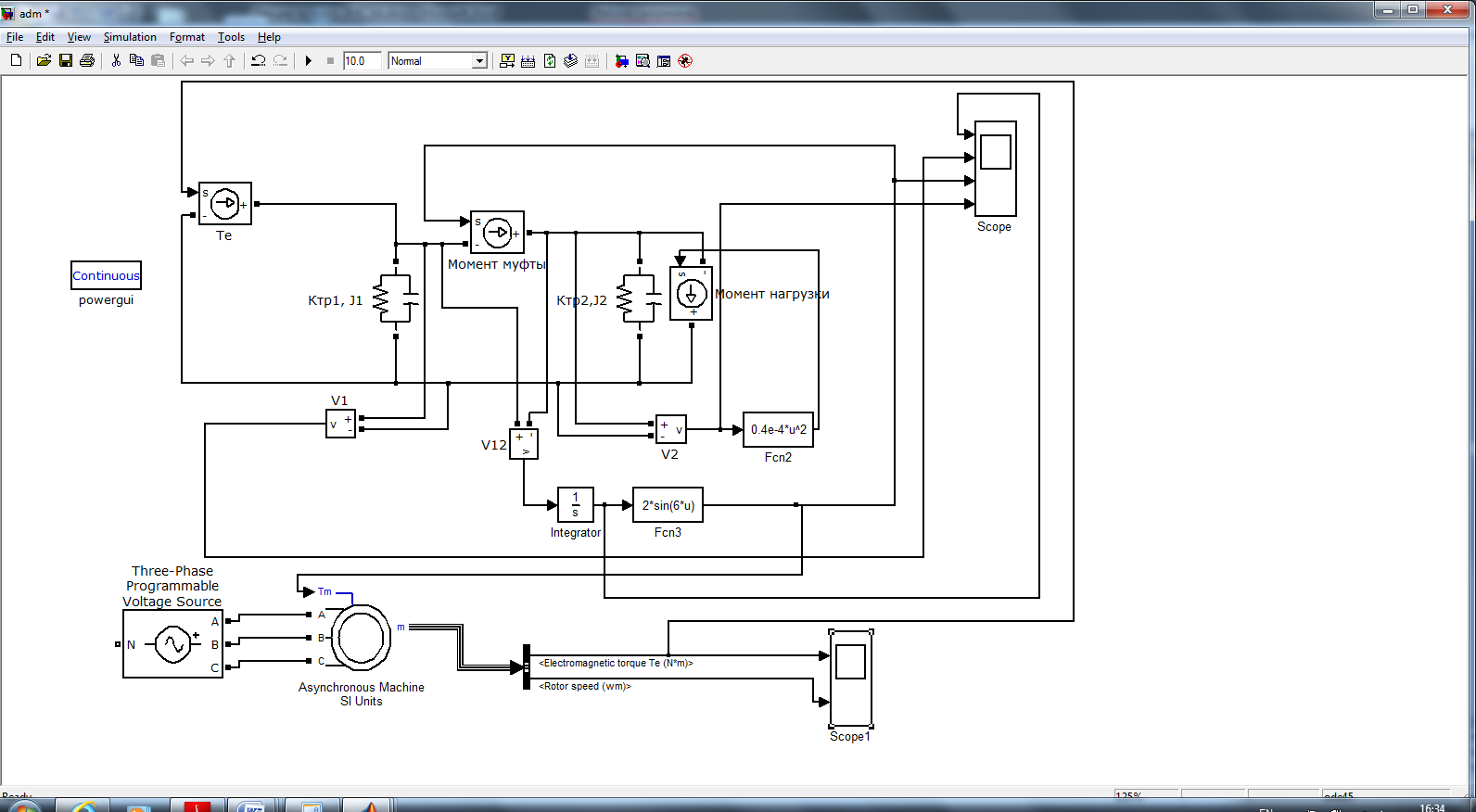
Модель электромеханической системы механизма в Matlab Simulink.
Результаты моделирования электромеханической системы механизма
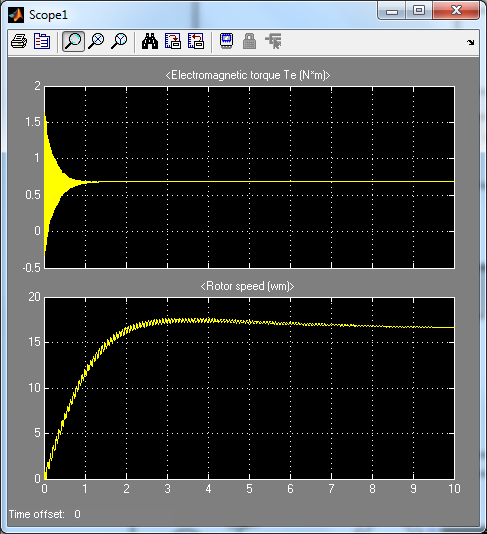

Временные зависимости основных параметров механизма при пуске
Варианты исходных данных
Конструкция магнитной муфты задана в прилагаемом файле исходных данных программы Easymag 3D
Асинхронный двигатель задан одинаковый для всех 4.5 кВт
Момент нагрузки Мнагр=Рнагр/ωном
ωном=157 рад/с
№ варианта |
J1,
|
J2,
|
Коэффициент трения kтр1, Нмс |
Коэффициент трения kтр2, Нмс |
Рнагр, Вт |
Студент |
1 |
5.0e-2 |
0.1 |
0.07 |
0.15 |
3 |
|
2 |
5.0e-2 |
0.1 |
0.06 |
0.15 |
3 |
|
3 |
5.0e-2 |
0.1 |
0.05 |
0.15 |
3 |
|
4 |
5.0e-2 |
0.1 |
0.04 |
0.15 |
3 |
|
5 |
5.0e-2 |
0.15 |
0.07 |
0.15 |
3 |
|
6 |
4.0e-2 |
0.15 |
0.06 |
0.1 |
2 |
|
7 |
4.0e-2 |
0.15 |
0.05 |
0.1 |
2 |
|
8 |
4.0e-2 |
0.15 |
0.04 |
0.1 |
2 |
|
9 |
4.0e-2 |
0.05 |
0.07 |
0.1 |
2 |
|
10 |
4.0e-2 |
0.05 |
0.06 |
0.1 |
2 |
|
11 |
3.0e-2 |
0.05 |
0.05 |
0.1 |
1 |
|
12 |
3.0e-2 |
0.05 |
0.04 |
0.1 |
1 |
|
13 |
3.0e-2 |
0.2 |
0.07 |
0.1 |
1 |
|
14 |
3.0e-2 |
0.2 |
0.06 |
0.08 |
1 |
|
15 |
3.0e-2 |
0.2 |
0.05 |
0.08 |
1 |
|
16 |
6.0e-2 |
0.2 |
0.04 |
0.08 |
4 |
|
17 |
6.0e-2 |
0.2 |
0.07 |
0.08 |
4 |
|
18 |
6.0e-2 |
0.12 |
0.06 |
0.08 |
4 |
|
19 |
6.0e-2 |
0.12 |
0.05 |
0.08 |
4 |
|
20 |
6.0e-2 |
0.12 |
0.04 |
0.08 |
4 |
|

Лекция 12. . Управляемый (активный) магнитный подвес. Принципы построения системы управления. Моделирование и анализ работы электромеханической системы комбинированного управляемого магнитного подвеса.
Литература
Электрические и электронные аппараты : учебник для вузов в 2 т Т.1 : Электромеханические аппараты / Е. Г. Акимов, [и др.] : под ред. А. Г. Годжелло, Ю. К. Розанов; учебник– М.: Академия, 2010
Журавлев Ю. Н. Активные магнитные подшипники: Теория, расчет, применение. - СПб.: Политехника, 2003. - 206 с.: ил.
Управляемый (активный) магнитный подвес
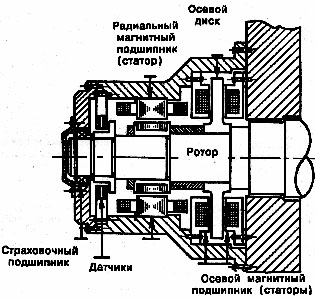
Основные элементы магнитных подшипников

Элементы конструкции магнитных подшипников
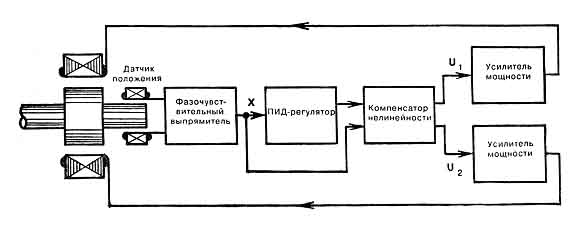
Система автоматического управление активным магнитным
Активные магнитные подшипники (АМП) (производство компании «S2M Société de Mécanique Magnétique SA», 2, rue des Champs, F-27950 St.Marcel, Франция)
|
Основные области применения активных магнитных подшипников – в составе турбомашин. Концепция отсутствия масла в компрессорах и турбодетандерах позволяет достичь высочайшей надежности также и за счет отсутствия износа узлов машины. Активные магнитные подшипники (АМП) находят все большее применение во многих отраслях промышленности. Для улучшения динамических характеристик, увеличения надежности и КПД применяются бесконтактные активные магнитные подшипники. |
Принцип действия магнитных подшипников основывается на эффекте левитации в магнитном поле. Вал в таких подшипниках в прямом смысле слова висит в мощном магнитном поле. Система датчиков постоянно отслеживает положение вала, и подает сигналы на позиционные магниты статора, корректируя силу притяжения с той или иной стороны. |
|