

П2. Моделирование и анализ динамики работы электромеханической системы выключателя с электромагнитным приводом
Построение модели контактора постоянного тока

Рис. 1. Контактор постоянного тока КВП-500
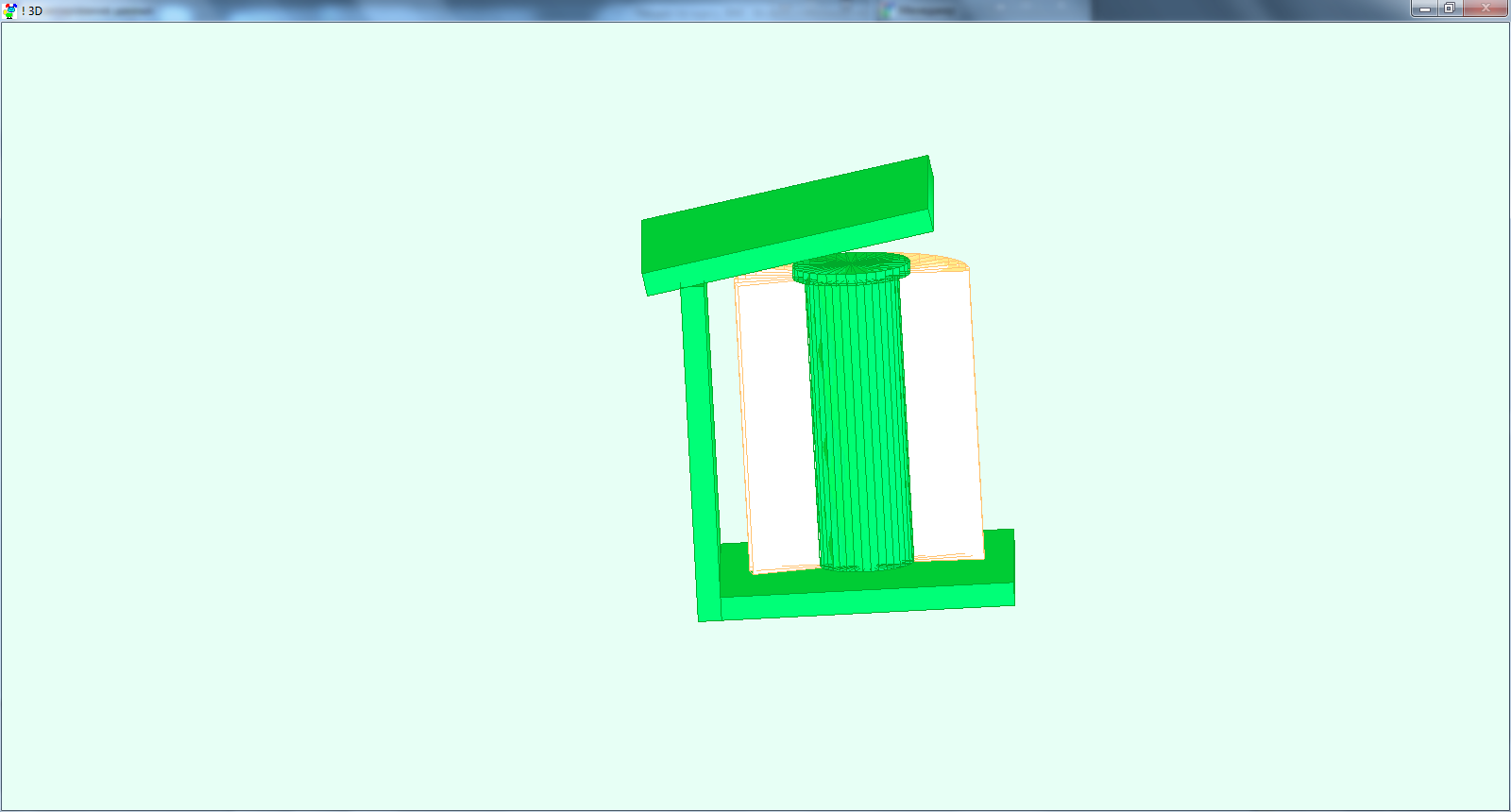
Компьютерная модель электромагнита контактора
Эквивалентные схемы электрической и механической подсистем приведены на рис. 3.
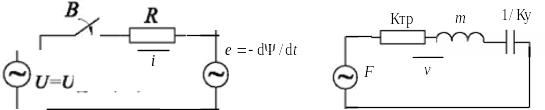
а) б)
Эквивалентные схемы электрической и механической подсистем: а - электрическая подсистема; б – механическая подсистема
Порядок решения, допущения
Построение аппроксимирующих функций потокосцепления и силы от тока и перемещения.
где
 , так как
, так как
 при
при
 .
.


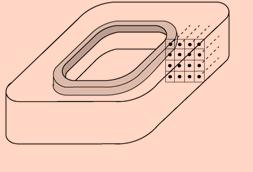
Рис.4. Выделение в катушке групп витков для расчета потокосцепления
Расчет потокосцепления


Для катушек в осесимметричных магнитных системах с равными числами витков в группах
 ,
где
,
где
 - векторный потенциал и радиус i-го
контура.
- векторный потенциал и радиус i-го
контура.
. Расчет действующей на якорь силы рекомендуется выполнять по формуле:
|
где
N – число витков в катушке; n – число выделенных в катушке секций |

 - весовой коэффициент для численного
интегрирования по формуле трапеций;
- весовой коэффициент для численного
интегрирования по формуле трапеций; -
приращение тока в катушке на одном
шаге по времени;
-
приращение тока в катушке на одном
шаге по времени; -
заданное малое перемещение якоря;
-
заданное малое перемещение якоря;
Расчеты
 выполняются
с помощью программы Easymag
3D
в соответствии с таблицей
выполняются
с помощью программы Easymag
3D
в соответствии с таблицей
Номер варианта |
x, мм |
I,А |
, Вб |
F, Н |
1 |
5 |
15.0 |
|
|
2 |
3 |
15.0 |
|
|
3 |
1 |
15.0 |
|
|
4 |
5 |
7.5 |
|
|
5 |
3 |
7.5 |
|
|
6 |
1 |
7.5 |
|
|
7 |
5 |
0 |
0 |
0 |
8 |
3 |
0 |
0 |
0 |
9 |
1 |
0 |
0 |
0 |
Для расчетов коэффициентов составляются системы уравнений по данным первых шести строк таблицы
 ;
;
 .
.
|
Статическая механическая характеристика контактора
|
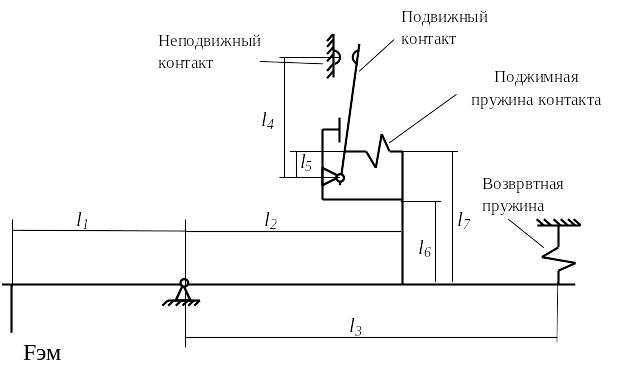 Кинематическая
схема механических подсистемы
Кинематическая
схема механических подсистемы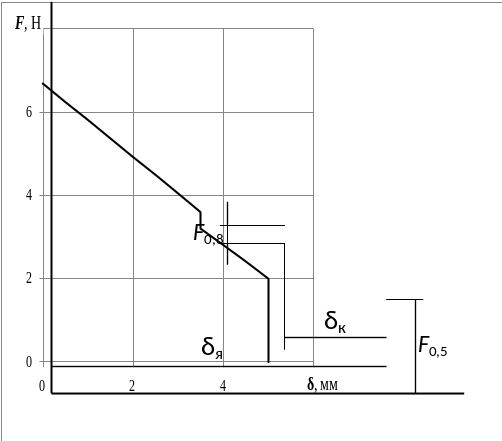
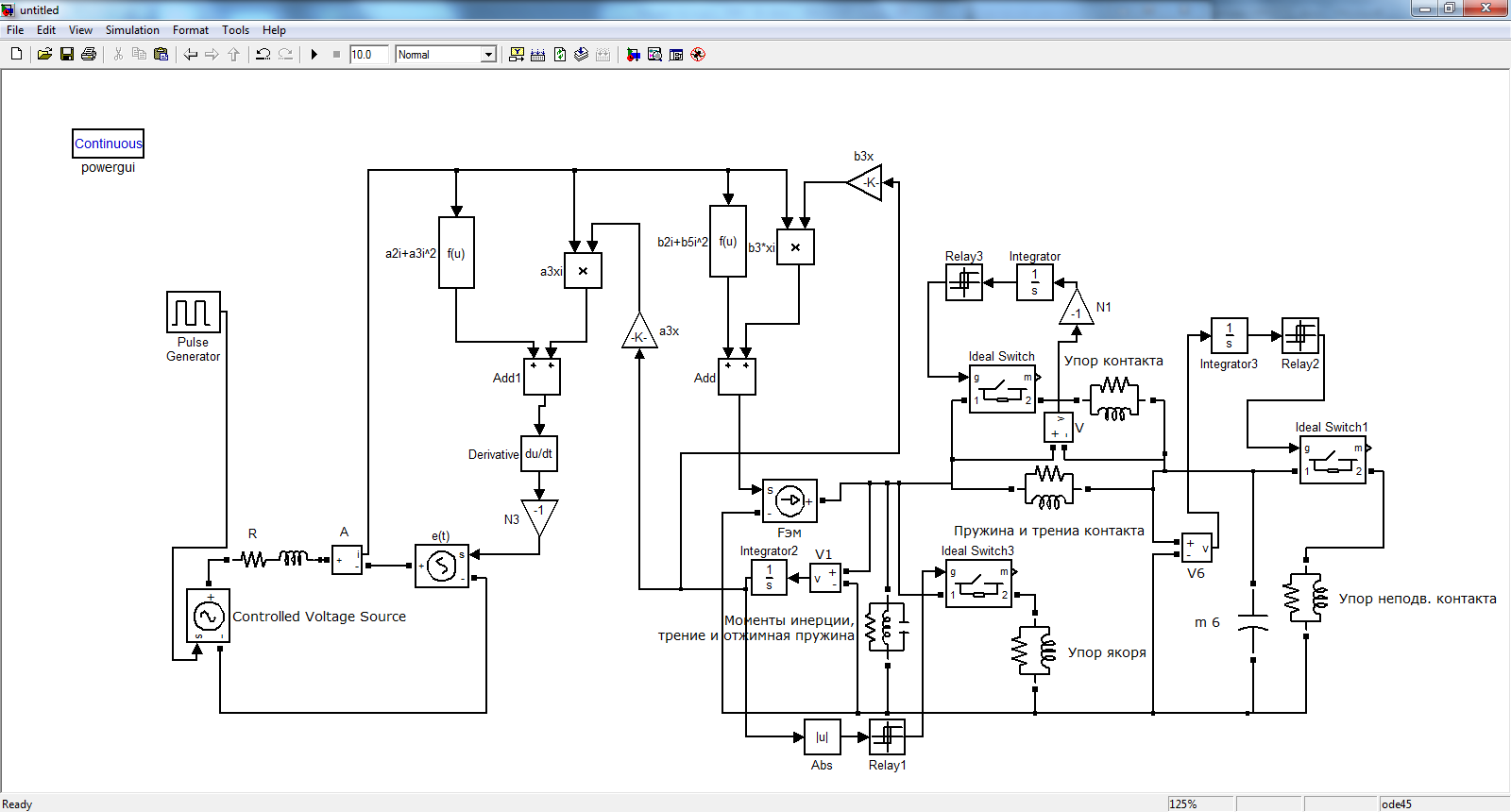
Эквивалентная схема электромеханической системы в Matlab Simulink (приведенная)
Варианты исходных данных
Конструкция электромагнита задана в прилагаемом файле исходных данных программы Easymag 3D
Коэффициенты
трения:
 ;
;
Напряжение питания 220 В;
Момент
инерции якоря
 ;
;
Момент
инерции контактной рейки
 .
.
№ вар |
l1, мм |
l2, мм |
l3, мм |
l4, мм |
l5, мм |
l6, мм |
l7, мм |
Ку1, Н/м |
F01, Н |
Ку2, Н/м |
F02, Н |
Число витков |
Студент
|
1 |
20 |
30 |
50 |
20 |
5 |
15 |
20 |
600 |
2 |
80 |
0.4 |
20000 |
|
2 |
20 |
35 |
55 |
20 |
5 |
15 |
20 |
700 |
2 |
80 |
0.4 |
22000 |
|
3 |
20 |
40 |
60 |
20 |
5 |
15 |
20 |
800 |
2 |
80 |
0.4 |
24000 |
|
4 |
20 |
45 |
65 |
20 |
5 |
15 |
20 |
900 |
2 |
80 |
0.4 |
26000 |
|
5 |
20 |
50 |
70 |
20 |
5 |
15 |
20 |
1000 |
2 |
80 |
0.4 |
28000 |
|
6 |
20 |
55 |
75 |
20 |
5 |
15 |
20 |
600 |
3 |
90 |
0.5 |
30000 |
|
7 |
20 |
60 |
80 |
20 |
5 |
15 |
20 |
700 |
3 |
90 |
0.5 |
32000 |
|
8 |
20 |
65 |
85 |
20 |
5 |
15 |
20 |
800 |
3 |
90 |
0.5 |
34000 |
|
9 |
20 |
70 |
90 |
20 |
5 |
15 |
20 |
900 |
3 |
90 |
0.5 |
36000 |
|
10 |
20 |
75 |
95 |
20 |
5 |
15 |
20 |
1000 |
3 |
90 |
0.5 |
38000 |
|
11 |
30 |
30 |
50 |
20 |
10 |
20 |
25 |
600 |
4 |
100 |
0.6 |
40000 |
|
12 |
30 |
35 |
55 |
20 |
10 |
20 |
25 |
700 |
4 |
100 |
0.6 |
20000 |
|
13 |
30 |
40 |
60 |
20 |
10 |
20 |
25 |
800 |
4 |
100 |
0.6 |
22000 |
|
14 |
30 |
45 |
65 |
20 |
10 |
20 |
25 |
900 |
4 |
100 |
0.6 |
24000 |
|
15 |
30 |
50 |
70 |
20 |
10 |
20 |
25 |
1000 |
4 |
100 |
0.6 |
26000 |
|
16 |
30 |
55 |
75 |
20 |
10 |
20 |
25 |
600 |
2.5 |
120 |
0.4 |
28000 |
|
17 |
30 |
60 |
80 |
20 |
10 |
20 |
25 |
700 |
2.5 |
120 |
0.4 |
30000 |
|
18 |
30 |
65 |
85 |
20 |
10 |
20 |
25 |
800 |
2.5 |
120 |
0.4 |
32000 |
|
19 |
30 |
70 |
90 |
20 |
10 |
20 |
25 |
900 |
2.5 |
120 |
0.4 |
34000 |
|
20 |
35 |
75 |
95 |
20 |
10 |
20 |
25 |
1000 |
2.5 |
120 |
0.4 |
36000 |
|
21 |
35 |
35 |
55 |
20 |
10 |
20 |
25 |
600 |
4.5 |
100 |
0.6 |
38000 |
|
22 |
35 |
40 |
60 |
20 |
10 |
20 |
25 |
700 |
4.5 |
100 |
0.6 |
40000 |
|
23 |
35 |
45 |
65 |
20 |
10 |
20 |
25 |
800 |
4.5 |
100 |
0.6 |
20000 |
|
24 |
35 |
50 |
70 |
20 |
10 |
20 |
25 |
900 |
4.5 |
100 |
0.6 |
22000 |
|
25 |
|
|
|
|
|
|
|
1000 |
4.5 |
100 |
0.6 |
24000 |
|
П3. Моделирование и анализ динамики работы вибрационного устройства с магнитоэлектрическим приводом.
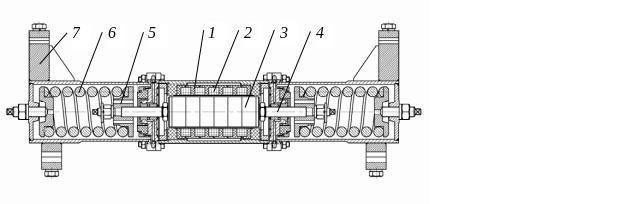
Линейный магнитоэлектрический привод вибрационного устройства

Кинематическая схема механической подсистемы привода
а) |
б) |


Эквивалентные схемы устройства
а,б — механическая и электрическая подсистемы
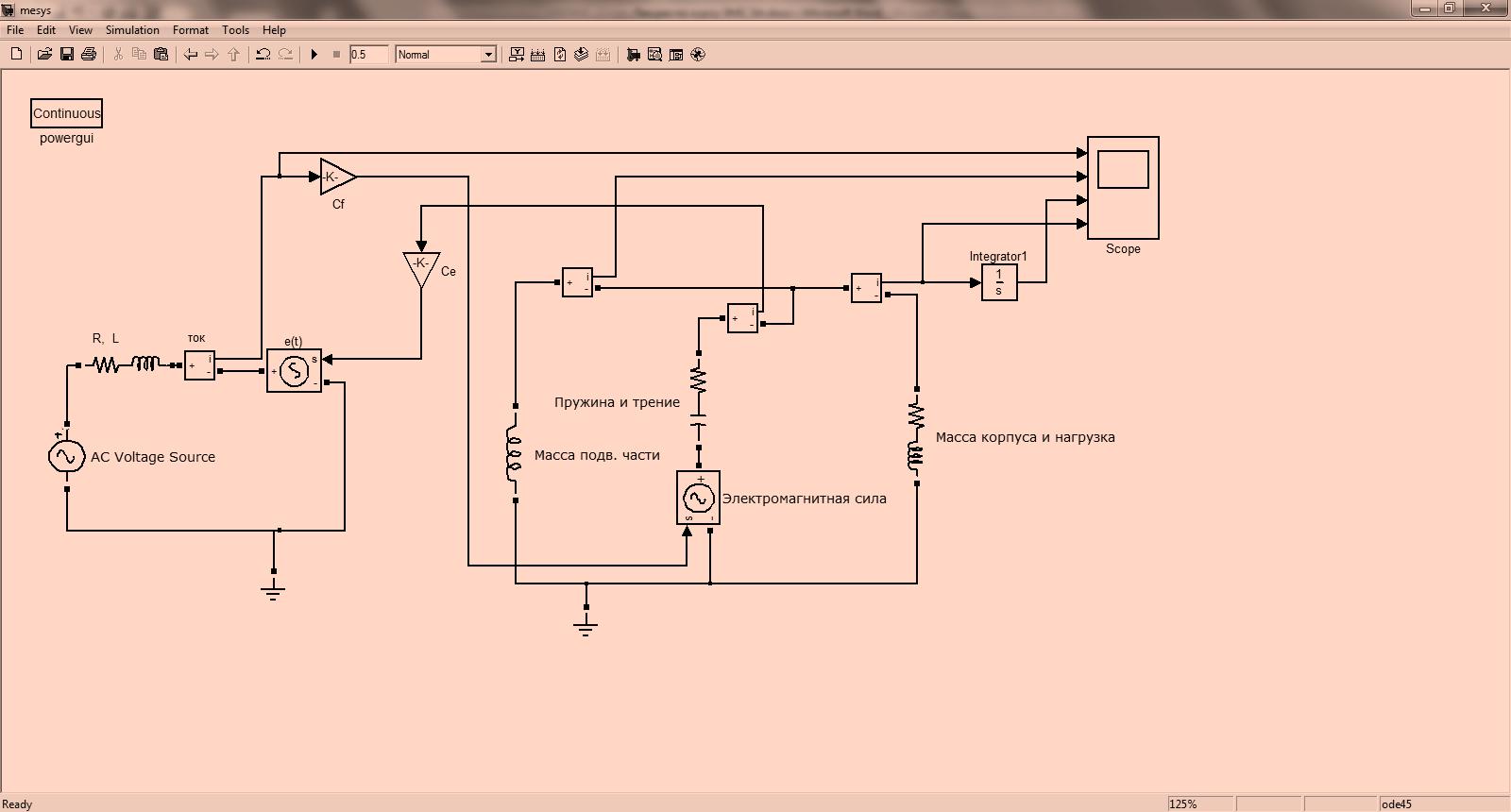
Модель вибрационного устройства в Matlab Simulink

Осциллограммы тока, относительной скорости подвижной части, перемещения и скорости нагрузки
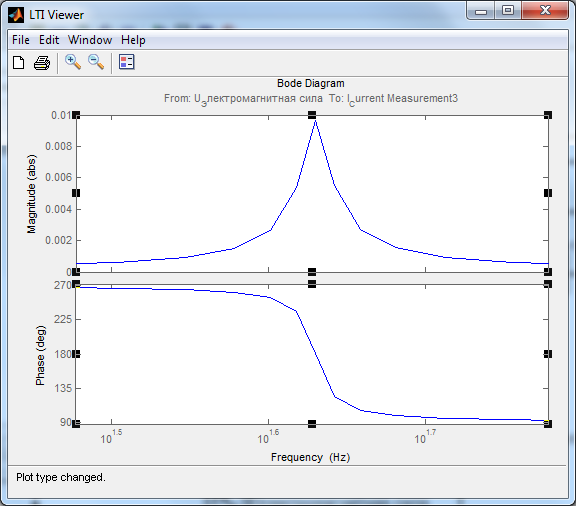
Амплитудно-частотные и фазочастотные характеристики скорости подвижной части устройства

Варианты исходных данных
Конструкция электромагнита задана в прилагаемом файле исходных данных программы Easymag 3D
Коэффициент
трения:
 Напряжение
питания 220 В;
Напряжение
питания 220 В;
№ вар |
Ку, Н/м |
m1 |
m2 |
Rмех |
Число витков |
Студент |
1 |
3.0e5 |
3 |
80 |
16000 |
900 |
|
2 |
4.0e5 |
4 |
80 |
14000 |
1000 |
|
3 |
5.0e5 |
5 |
80 |
12000 |
1100 |
|
4 |
6.0e5 |
6 |
80 |
10000 |
1200 |
|
5 |
7.0e5 |
7 |
80 |
8000 |
1300 |
|
6 |
3.0e5 |
3 |
90 |
16000 |
1400 |
|
7 |
4.0e5 |
4 |
90 |
14000 |
1500 |
|
8 |
5.0e5 |
5 |
90 |
12000 |
1600 |
|
9 |
6.0e5 |
6 |
90 |
10000 |
1700 |
|
10 |
7.0e5 |
7 |
90 |
8000 |
1800 |
|
11 |
3.0e5 |
3 |
100 |
16000 |
1900 |
|
12 |
4.0e5 |
4 |
100 |
14000 |
2000 |
|
13 |
5.0e5 |
5 |
100 |
12000 |
900 |
|
14 |
6.0e5 |
6 |
100 |
10000 |
1000 |
|
15 |
7.0e5 |
7 |
100 |
8000 |
1100 |
|
16 |
3.0e5 |
3 |
120 |
16000 |
1200 |
|
17 |
4.0e5 |
4 |
120 |
14000 |
1300 |
|
18 |
5.0e5 |
5 |
120 |
12000 |
1400 |
|
19 |
6.0e5 |
6 |
120 |
10000 |
1500 |
|
20 |
7.0e5 |
7 |
120 |
8000 |
1600 |
|
21 |
3.0e5 |
3 |
100 |
16000 |
1700 |
|
22 |
4.0e5 |
4 |
100 |
14000 |
1800 |
|
23 |
5.0e5 |
5 |
100 |
12000 |
1900 |
|
24 |
6.0e5 |
6 |
100 |
10000 |
2000 |
|
25 |
7.0e5 |
7 |
100 |
8000 |
900 |
|