

2.2 Тахогенераторы постоянного тока
В системах автоматического управления широкое применение имеют тахогенераторы постоянного тока.
Тахогенераторы представляют собой электрические генераторы небольшой мощности, служащие для преобразования частоты вращения в электрический сигнал. Как правило, тахогенераторы выполняют с электромагнитным (рис. 2.2. а) или магнитоэлектрическим (рис. 2.2.) возбуждением.
Основными требованиями, предъявляемыми к тахогенераторам, являются: а) линейность выходной характеристики; б) большая крутизна выходной характеристики; в) малое влияние на выходную характеристику изменения температуры окружающей среды и нагрузки; г) минимум пульсаций напряжения на коллекторе.
Выходная
характеристика тахогенератора
представляет собой зависимость
![]() .
Для
обеспечения линейности характеристики
должна быть сохранена строгая
пропорциональность между выходным
напряжением
.
Для
обеспечения линейности характеристики
должна быть сохранена строгая
пропорциональность между выходным
напряжением
![]() и
частотой вращения
и
частотой вращения
![]() :
:
![]() ,
или
,
или
![]() ,
(2.1.)
,
(2.1.)
где k
—
статический коэффициент усиления;
![]() – угловая частота вращения.
– угловая частота вращения.
Крутизна выходной характеристики представляет собой отношение приращения напряжения к приращению частоты вращения:
![]() (2.2)
(2.2)
При холостом ходе ЭДС якоря пропорциональна частоте вращения:
![]() ,
(2.3)
,
(2.3)
где
![]() ,
Ф
–
магнитный поток возбуждения.
,
Ф
–
магнитный поток возбуждения.
При нагрузке напряжение на зажимах тахогенератора уменьшается на падение напряжения:
![]() ,
,
где
![]() ,
RH
–
сопротивление нагрузки.
,
RH
–
сопротивление нагрузки.
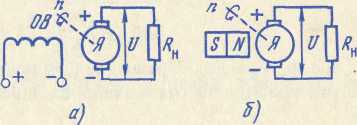
Рисунок 2.2. Схемы тахогенераторов постоянного тока
Подставляя
значение
![]() в уравнение (2.3),
получим
в уравнение (2.3),
получим
![]() ,
откуда
,
откуда
![]()
При постоянстве значении Rя, RН и Фв можно принять:
![]() (2.4)
(2.4)
где коэффициент
![]() (2.5)
(2.5)
Чем больше Ф, RH, и меньше RЯ тем больше крутизна с1. Тахогенераторы с электромагнитным возбуждением имеют большую крутизну выходной характеристики, чем магнитоэлектрические.
Из уравнения (2.5) следует, что выходное напряжение U и при нагрузке является линейной функцией частоты вращения. Однако практически выходная характеристика отклоняется от линейной (рис. 2.5) из-за наличия реакции якоря, ослабляющей поток возбуждения Ф.
Отклонение от линейности из-за размагничивающего действия реакции якоря определяет первую погрешность тахогенератора. Для уменьшения ее следует нагружать тахогенератор на относительно большое сопротивление нагрузки RH и использовать небольшой диапазон частот вращения. Вторая погрешность обусловлена наличием переходного контакта между коллектором и щетками.
Падение напряжения на переходном контакте Rщ с некоторым допущением можно считать постоянным: Для уменьшения падения напряжения ΔUщ в тахогенераторах применяют медно-графитовые или серебряно-графитовые щетки.
В тахогенераторах с электромагнитным возбуждением наблюдается неустойчивость выходной характеристики вследствие нагрева обмотки полюсов. Для уменьшения температурного влияния на выходной характеристики магнитная система тахогенератора делается насыщенной. В этом случае изменение тока возбуждения вследствие температурного изменения сопротивления обмотки почти не влияет на магнитный поток тахогенератора. Практически за крутизну выходной характеристики часто принимают число вольт, приходящееся на 1000 об/мин.
Напряжение на выходе тахогенератора, как и напряжение генератора постоянного тока, имеет якорные, зубцовые и коллекторные пульсации. Сглаживание пульсаций выходного напряжения тахогенератора осуществляется за счет: а) увеличения зазора до пределов, определяемых допустимой МДС возбуждения машины; б) строгой цилиндричности поверхности якоря и коллектора; в) устранения эксцентриситета якоря; г) специальной веерообразной сборки железа якоря со сдвигом каждого листа относительно предыдущего на один зубцовый шаг; д) изготовления тахогенераторов таким образом, чтобы число пазов или зубцов на полюс не равнялось целому числу; е) увеличение числа коллекторных пластин.
Тахогенераторы применяют для: а) измерения частоты вращения любого вала в диапазоне 0-10000 об/мин; б) осуществления вычислительных операций; в) выработки сигнала, пропорционального частоте вращения в схемах автоматического регулирования частоты вращения и в системах следящего привода.

Рисунок 2.3. Выходные характеристики тахогенератора при различных RH
От тахогенератора могут питаться потенциометры, потребляющие при максимальной рабочей частоте вращения мощность до десятков ватт; обмотки электромашинных или электромагнитных устройств и элементов, а также и реле. В некоторых системах к тахогенераторам подключают входные цепи электронных и полупроводниковых усилителей.
Литература 1 осн [13-16, 23-28], 2 доп [716-721].
Контрольные вопросы
1. Какую функцию выполняет обмотка якоря?
Что называется тахогенератором?
Какая характеристика называется выходной характеристикой тахогенератора?
Чем обусловлена погрешность тахогенератора?
Что такое реакция якоря?
Чему приводит реакция якоря?
Лекция 12. Двигатели постоянного тока. Уравнение моментов.
Характеристики двигателя
постоянного тока.
12.1 Двигатели постоянного тока
Двигатели постоянного тока применяют в приводах, требующих плавного регулирования частот вращения в широком диапазоне. Свойства двигателей, как и генераторов, определяются способом возбуждения и схемой включения обмоток возбуждения. По способу возбуждения различают двигатели с электромагнитным и магнитоэлектрическим возбуждением. Электрические двигатели с электромагнитным возбуждением делятся на двигатели с параллельным (шунтовые), последовательным (сериесные), смешанным (компаундные) и независимым возбуждением.
Как отмечалось, электрические машины постоянного тока обратимы, т. е. могут работать не только генераторами, но и двигателями. Если отсоединить генератор от первичного двигателя и подвести напряжение к обмоткам якоря и возбуждения, то якорь начнет вращаться и машина будет работать как двигатель, преобразуя электрическую энергию в механическую. Направления тока и ЭДС в проводниках обмотки якоря двигателя показаны на рис. 3.1.
Преобразование
электрической энергии в механическую
во всех двигателях можно наглядно
показать с помощью
энергетической диаграммы (рис. 3.2).
На рис. 2.5
![]() –
полная
электрическая
мощность, подводимая к двигателю;
–
полная
электрическая
мощность, подводимая к двигателю;
![]() –
мощность
потерь в
цепи возбуждения;
–
мощность
потерь в
цепи возбуждения;
![]() –
мощность потерь в цепи якоря;
–
мощность потерь в цепи якоря;
![]() –
мощность потерь холостого хода;
–
мощность потерь холостого хода;
![]() –
полная механическая
мощность;
–
полная механическая
мощность;
![]() – электромагнитная
мощность;
– электромагнитная
мощность;
![]() —
полезная механическая
мощность на валу.
—
полезная механическая
мощность на валу.
Рассмотрим
энергетическую диаграмму для
двигателя с параллельным
возбуждением (рис. 2.7). Из диаграммы
видно, что
![]()
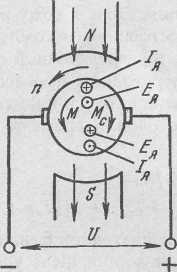
Рисунок 3.1. Направления тока и ЭДС в проводниках обмотки якоря двигателя
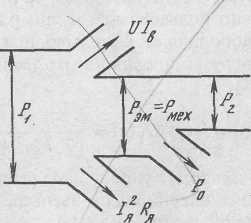
Рисунок 3.2. Энергетическая диаграмма двигателя постоянного тока
Учитывая (1.1), получим уравнение равновесия ЭДС двигателя:
![]() .
(3.1)
.
(3.1)
На основании (3.1) ток якоря:
![]() (3.2)
(3.2)
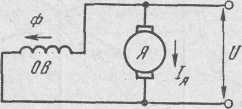
Рисунок 3.3. Схема двигателя постоянного тока параллельного возбуждения
Можно доказать, что
![]() (3.3)
(3.3)
где:
![]() – угловая частота вращения якоря,
– частота вращения якоря, об/мин,
– электромагнитная мощность двигателя.
– угловая частота вращения якоря,
– частота вращения якоря, об/мин,
– электромагнитная мощность двигателя.