

Контрольные вопросы:
Назовите способы возбуждения?
Нарисуйте механическую характеристику двигателя параллельного возбуждения?
Нарисуйте механическую характеристику двигателя последовательного возбуждения?
Нарисуйте механическую характеристику двигателя смешанного возбуждения?
Для чего предназначены регулировочные сопротивления?
Лекция 14 Синхронные машины.
Способы пуска синхронного двигателя.
Векторная диаграмма и основные характеристики синхронного генератора.
Принцип действия и устройство синхронного явнополюсного двигателя.
Характерный признак синхронного двигателя – вращение ротора с синхронной частотой
n1 =f160/p, независимо от нагрузки на валу. Поэтому синхронные двигатели используются в системах автоматики для приводов механизмов, требующих строго стабильной частоты вращения.
Синхронный двигатель, как и асинхронный, состоит из неподвижного статора и вращающегося ротора, разделенных воздушным зазором. Существуют конструктивные разновидности исполнения синхронных двигателей малой мощности, отличающихся устройством ротора:
- явнополюсные с электромагнитным возбуждением,
- явнополюсные с возбуждением постоянными магнитами,
- явнополюсные реактивные (с невозбужденным ротором),
- неявнополюсные гистерезисные.
Т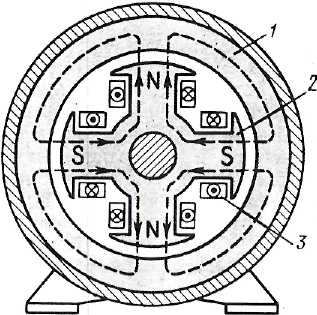 рехфазный
синхронный двигатель имеет неявнополюсный
статор с распределенной трехфазной
обмоткой двигателя
— явнополюсной
конструкции с электромагнитным
возбуждением.
При этом на
полюсах ротора 2
располагают
полюсные катушки
3
(рис.
1), которые
при последовательном соединении
образуют
обмотку возбуждения
(ОВ). При подключении
ОВ к источнику
постоянного тока
возникает магнитный
поток возбуждения ФВ,
силовые линии которого
сцеплены с обмоткой статора 1.
При
включении
обмотки статора
в трехфазную сеть создается
вращающееся с синхронной частотой n1
магнитное
поле с таким же числом полюсов, как на
роторе.
Благодаря взаимодействию полей статора
и ротора возникает
электромагнитный момент, вращающий
ротор с синхронной
частотой. В результате
рехфазный
синхронный двигатель имеет неявнополюсный
статор с распределенной трехфазной
обмоткой двигателя
— явнополюсной
конструкции с электромагнитным
возбуждением.
При этом на
полюсах ротора 2
располагают
полюсные катушки
3
(рис.
1), которые
при последовательном соединении
образуют
обмотку возбуждения
(ОВ). При подключении
ОВ к источнику
постоянного тока
возникает магнитный
поток возбуждения ФВ,
силовые линии которого
сцеплены с обмоткой статора 1.
При
включении
обмотки статора
в трехфазную сеть создается
вращающееся с синхронной частотой n1
магнитное
поле с таким же числом полюсов, как на
роторе.
Благодаря взаимодействию полей статора
и ротора возникает
электромагнитный момент, вращающий
ротор с синхронной
частотой. В результате
Рис. 1
электрическая энергия сети преобразуется в механическую энергию вращения.

Рис. 2. Явнополюсный ротор (а) и пусковая обмотка (б) синхронного
двигателя
Предположим, что ротор двигателя вращается с частотой, отличающейся от частоты вращения поля статора, тогда в некоторые моменты времени возбужденные полюса ротора окажутся под одноименными полюсами поля статора, возникнут силы магнитного отталкивания. Суммарный электромагнитный момент станет равным нулю и ротор остановится.
На рис. 2, а показана конструкция ротора синхронного двигателя с явно выраженными полюсами. Ротор состоит из вала 1, на котором укреплены сердечники полюсов с полюсными катушками 3. Каждый сердечник. заканчивается полюсным наконечником 4. В полюсных наконечниках имеются пазы (рис. 2,б), в которых расположены стержни 1 пусковой обмотки, замкнутые с двух сторон кольцами 2. Для подключения вращающейся обмотки возбуждения к источнику постоянного тока на валу ротора находятся два изолированных от вала и друг от друга контактных кольца 2 (рис. 2,а), по которым скользят щетки, вставленные в специальные щеткодержатели. От щеток сделаны выводы И1 и И2, через которые обмотка возбуждения соединяется с источником постоянного тока (рис. 3) и в цепи обмотки

Рис. 3. Электромагнитная схема синхронного двигателя
протекает ток возбуждения IB, который создает МДС FB = IBwB. В магнитопроводе двигателя появляется поток возбуждения Фв. В качестве источника постоянного тока в синхронных двигателях обычно используют полупроводниковые выпрямительные устройства. Например, в двигателях средней и большой мощности применяют тири- сторные возбудительные устройства. Подключение двигателя к трехфазной сети осуществляется через выводы обмотки статора С1, С2, СЗ.
2. Пуск синхронного двигателя с электромагнитным возбуждением
Синхронный двигатель при подключении его обмоток к источнику питания не развивает пускового момента. Ротор, по причине своей инерционности не может мгновенно достичь частоты вращения, равной частоте вращения магнитного поля статора, которая устанавливается почти одновременно с включением обмотки статора в сеть. Поэтому между полюсами возбужденного ротора и вращающегося поля статора не возникает устойчивой магнитной связи, создающей синхронный вращающий момент.
Для пуска синхронного двигателя необходимо предварительно привести ротор во вращение с частотой, близкой частоте вращения поля статора.
Существует несколько способов пуска синхронного двигателя, но практическое применение получил асинхронный способ. Для его реализации в пазах полюсных наконечников ротора располагают стержни пусковой короткозамкнутой обмотки, выполненной аналогично обмотке короткозамкнутого ротора. Обычно стержни этой обмотки делают из латуни или меди и замыкают с двух сторон медными кольцами (см. рис. 4, б) .
Для пуска синхронного двигателя с электромагнитным возбуждением замыкают обмотку возбуждения ОВ на резистор r (рис.4, а), подключают к трехфазной сети обмотку статора. Вращающееся поле статора наводит в пусковой обмотке ЭДС, которая создает в стержнях обмотки токи. В результате взаимодействия этих токов с вращающимся полем статора на каждый стержень ротора действует электромагнитная сила FЭM (рис.4,б). Совокупность таких сил создает асинхронный электромагнитный момент Ма, под действием которого ротор начинает вращаться в ту же сторону, что и поле статора. После разгона ротора до частоты вращения, близкой к синхронной (n2 = 0,95n1), обмотку возбуждения ОВ подключают к источнику постоянного тока. При этом двигатель возбуждается (полюса ротора намагничиваются), между вращающимся полем статора и полюсами ротора устанавливается устойчивая магнитная связь, создающая синхронный электромагнитный момент М, и двигатель втягивается в синхронизм, т. е. его ротор начинает вращаться синхронно с вращающимся магнитным полем. В пусковой обмотке ротора больше не наводится ЭДС, асинхронный момент равен Ма= 0.


Рис.4 Асинхронный пуск синхронного двигателя с электромагнитным возбуждением
С ростом нагрузки на валу двигателя вхождение в синхронизм затрудняется. Максимальный момент нагрузки на валу синхронного двигателя, при котором ротор еще втягивается в синхронизм, называется моментом входа в синхронизм МВХ.
Не допускается пуск синхронного двигателя с подключенной к источнику постоянного тока обмоткой возбуждения, так как в этом случае магнитный поток возбуждения ФВ при разгоне ротора будет наводить в обмотке статора ЭДС. В результате взаимодействия проходящего на обмотке статора тока, вызванного этой ЭДС, с полем возбуждения возникает тормозящий момент, ухудшающий пусковые свойства синхронного двигателя.
При пуске синхронного двигателя обмотку возбуждения следует замкнуть на резистор с активным сопротивлением r, примерно в 10 раз превышающим активное сопротивление обмотки возбуждения. Если оставить обмотку возбуждения разомкнутой, то вращающееся поле статора, обгоняя ротор с большой скоростью, наведет в его обмотке значительную ЭДС, способную вызвать пробой межвитковой изоляции обмотки возбуждения.
Потери и КПД.
Потери подразделяются на основные и добавочные. Основные потери складываются из магнитных РМ1 и электрических потерь РЭ1 в статоре, потерь на возбуждение и механических. Магнитные РМ1 и электрические потери РЭ1 и добавочные потери определяются также как и для асинхронных двигателей. Потери на возбуждение:
РВ= I2вrв+ΔUщIв
Где rв – активное сопротивление обмотки возбуждения, приведенное к рабочей температуре, Ом; ΔUщ =2В - падение напряжения в щетках цепи возбуждения.
Механические потери PMex состоят из потерь на трение в подшипниках и контактных кольцах и потерь на вентиляцию.
Суммарные потери в синхронном двигателе, Вт,
ΣР = Рм1 + РЭ1 + РВ + Рмех + Рдоб.
Коэффициент полезного действия синхронного двигателя зависит от нагрузки на валу Р2 и коэффициента мощности cos φ1. Для синхронных двигателей мощностью до 100 кВт КПД при номинальной нагрузке составляет 80—90%.
Электромагнитный момент. Электромагнитная мощность синхронного двигателя, Вт,
РЭМ= Р1 - ( РЭ1 +РМ1)
затрачивается в основном на создание электромагнитного момента, Н·м,
Анализ (5.5) показывает, что электромагнитный момент синхронного двигателя с явнополюсным ротором и электромагнитным возбуждением представляет собой сумму двух составляющих:
Основного
момента Мосн
≈![]() ,
,
Реактивного момента
МР≈![]()
Лекция 15. Электропривод.
Тепловой режим и выбор электрических двигателей. Нагрев и охлаждение электрических машин. Закон изменения температуры в электрической машине. Выбор мощности двигателей при длительной нагрузке, при кратковременном и повторно-кратковременном режимах.
Производственные машины и механизмы, как правило, приводятся в движение с помощью электрического привода, который включает в себя электрические двигатели, систему передачи и аппаратуру управления. Выбор рода тока и величины питающего напряжения приводного электродвигателя зависит от ряда факторов. Применение электродвигателей постоянного тока в системе электрического привода обусловливается необходимостью регулирования частоты вращения производственного механизма. Они характеризуются сложной технологией изготовления, более дорогие и менее надежны в эксплуатации по сравнению с электродвигателями переменного тока. Мощность электродвигателя должна соответствовать мощности производственного механизма, так как занижение мощности электродвигателя способствует преждевременному выходу его из строя, а завышение приводит к снижению КПД η и коэффициента мощности cos φ, повышению стоимости и массогабаритных показателей установленного электрооборудования. В большинстве случаев электродвигатель выбирают по нагреву и проверяют по перегрузочной способности, при этом они должны иметь достаточный пусковой момент МПУС для обеспечения нормального пуска.
При длительном режиме работы электродвигателя и неизменной нагрузке (рис. 14.1.1, а) превышение температуры двигателя над температурой окружающей среды определяется уравнением: τ = τу(1— е-t/Tн) где τу — установившаяся температура электродвигателя, °С; t — текущее время, с; Tн — постоянная времени нагрева, с.
При длительном режиме (t = ∞) значение установившейся

температуры электродвигателя: τ = τу = Q/A, где Q — количество теплоты, выделяемой электродвигателем в единицу времени, Дж/с;
А — теплоотдача электродвигателя, Дж/с·град.
Постоянная времени нагрева электродвигателя определяется отношением: Tн = С/А, где
С — его теплоемкость, т. е. количество теплоты, необходимой для повышения температуры двигателя на 1°С.
Для производственных механизмов, предназначенных для работы в длительном неизменном режиме, мощность электродвигателя выбирают по каталогу исходя из значения мощности, необходимой для приведения в движение механизма при данной частоте его вращения пм. При этом должно удовлетворяться условие Pном ≥ Рм, где Рном и Рм — номинальная мощность электродвигателя и расчетная мощность механизма.
В данном случае нет необходимости проверки электродвигателя по нагреву, так как при номинальной нагрузке нагрев его всегда находится в допустимых для данного класса используемой изоляции пределах. При этом, поскольку режим работы длительный с неизменной нагрузкой, выбранный электродвигатель на перегрузочную способность по максимальному моменту также не проверяется.
Эквивалентное (среднеквадратичное) значение тока, потребляемого электродвигателем при переменном режиме работы (рис.14.1.1 б, в ) определяют по формуле:

где I1, I2 и т.д. – значение токов электродвигателя в промежутки времени t1, t2 и т.д., соответствующие участкам графика с неизменной нагрузкой. Iпуск, tT , tо — средние значения тока электродвигателя соответственно во время пуска, торможения и паузы; К1 — коэффициент, учитывающий уменьшение теплоотдачи электродвигателя при пуске и торможении (принимается равным 0,75 для двигателей постоянного тока и 0,5 — для асинхронных двигателей); К2— коэффициент, учитывающий уменьшение теплоотдачи электродвигателя во время паузы (принимается равным 0,5 для двигателей постоянного тока и 0,25 для асинхронных двигателей). По значению эквивалентного тока выбирают по каталогу соответствующий электродвигатель исходя из условия, что Iном ≥ Iэк, где Iном — номинальный ток двигателя. Выбранный таким образом электродвигатель удовлетворяет условиям допустимого нагрева, так как двигатели для продолжительного режима работы имеют номинальную мощность, указываемую в каталоге, без ограничения времени его работы. Далее электродвигатель проверяют по перегрузочной способности исходя из условия: λ ≥ IM/IH0M, где IM- наибольший ток рабочего промежутка времени, который находят исходя из диаграммы нагрузки двигателя.
Требуемую мощность электродвигателя (на основании нагрузочной диаграммы при длительной переменной нагрузке, заданной в виде графика эквивалентного момента в функции времени) определяют по формуле:
PЭК=![]()
Номинальная мощность электродвигателя определяется по значению эквивалентного момента по формуле: Рном = МЭК · nном/9550, где nном — номинальная частота вращения двигателя. Мощность двигателя выбирается либо по эквивалентному моменту
МЭК= ,
,
либо по эквивалентному току
IЭК
=

Проверку электродвигателя по условиям допустимой перегрузки производят исходя из условия: Мтах/МНом ≥ λм,, где λм — кратность максимального момента соответствующего электродвигателя по каталогу; Mmax — максимальный момент двигателя. Электродвигатель проверяется также по достаточности развиваемого им пускового момента из условия:
Мпуск /Мном ≤ λпуск, где λпуск - кратность пускового момента двигателя по каталогу; Мпуск — пусковой момент электродвигателя.
Принцип действия и устройство синхронного явнополюсного двигателя.
Характерный признак синхронного двигателя – вращение ротора с синхронной частотой
n1 =f160/p, независимо от нагрузки на валу. Поэтому синхронные двигатели используются в системах автоматики для приводов механизмов, требующих строго стабильной частоты вращения.
Синхронный двигатель, как и асинхронный, состоит из неподвижного статора и вращающегося ротора, разделенных воздушным зазором. Существуют конструктивные разновидности исполнения синхронных двигателей малой мощности, отличающихся устройством ротора:
- явнополюсные с электромагнитным возбуждением,
- явнополюсные с возбуждением постоянными магнитами,
- явнополюсные реактивные (с невозбужденным ротором),
- неявнополюсные гистерезисные.
Т рехфазный синхронный двигатель имеет неявнополюсный статор с распределенной трехфазной обмоткой двигателя — явнополюсной конструкции с электромагнитным возбуждением. При этом на полюсах ротора 2 располагают полюсные катушки 3 (рис. 1), которые при последовательном соединении образуют обмотку возбуждения (ОВ). При подключении ОВ к источнику постоянного тока возникает магнитный поток возбуждения ФВ, силовые линии которого сцеплены с обмоткой статора 1. При включении обмотки статора в трехфазную сеть создается вращающееся с синхронной частотой n1 магнитное поле с таким же числом полюсов, как на роторе. Благодаря взаимодействию полей статора и ротора возникает электромагнитный момент, вращающий ротор с синхронной частотой. В результате
Рис. 1
электрическая энергия сети преобразуется в механическую энергию вращения.
Рис. 2. Явнополюсный ротор (а) и пусковая обмотка (б) синхронного
двигателя
Предположим, что ротор двигателя вращается с частотой, отличающейся от частоты вращения поля статора, тогда в некоторые моменты времени возбужденные полюса ротора окажутся под одноименными полюсами поля статора, возникнут силы магнитного отталкивания. Суммарный электромагнитный момент станет равным нулю и ротор остановится.
На рис. 2, а показана конструкция ротора синхронного двигателя с явно выраженными полюсами. Ротор состоит из вала 1, на котором укреплены сердечники полюсов с полюсными катушками 3. Каждый сердечник. заканчивается полюсным наконечником 4. В полюсных наконечниках имеются пазы (рис. 2,б), в которых расположены стержни 1 пусковой обмотки, замкнутые с двух сторон кольцами 2. Для подключения вращающейся обмотки возбуждения к источнику постоянного тока на валу ротора находятся два изолированных от вала и друг от друга контактных кольца 2 (рис. 2,а), по которым скользят щетки, вставленные в специальные щеткодержатели. От щеток сделаны выводы И1 и И2, через которые обмотка возбуждения соединяется с источником постоянного тока (рис. 3) и в цепи обмотки
Рис. 3. Электромагнитная схема синхронного двигателя
протекает ток возбуждения IB, который создает МДС FB = IBwB. В магнитопроводе двигателя появляется поток возбуждения Фв. В качестве источника постоянного тока в синхронных двигателях обычо используют полупроводниковые выпрямительные устройства. Например, в двигателях средней и большой мощности применяют тири- сторные возбудительные устройства. Подключение двигателя к трехфазной сети осуществляется через выводы обмотки статора С1, С2, СЗ.
Лекция 12. Шаговые двигатели.