

6.2 Определение оптимальных значений параметров настройки регуляторов каскадной системы управления
Аналогично как для одноконтурной системы воспользуемся системой [2] для определения настроечных параметров:
![]() (54)
(54)
где
![]() -
обратная передаточная функция
эквивалентного объекта (24),
-
обратная передаточная функция
эквивалентного объекта (24),
(55)
![]() -действительная
и мнимая части передаточной функции
эквивалентного объекта.
-действительная
и мнимая части передаточной функции
эквивалентного объекта.
Для получения расширенных частотных характеристик сделаем подстановку
s= - m + j в выражение (55):
![]()
![]()
Воспользуемся формулой Эйлера, преобразуем уравнение:
![]()




![]()



Из полученного выражения выделим мнимую и действительную часть:
![]()
Подставляя числовые значения в выражения мнимой и действительной части эквивалентного объекта, получим:


Подставим найденные выражения и m=0,221 в систему (52).
 (56)
(56)
 (57)
(57)
Используя (56) и (57) построим зависимость С0(С1):
Таблица 7.
w |
C0 |
C1 |
0 |
0 |
-0,448 |
0,1 |
0,009182 |
-0,4032 |
0,2 |
0,035209 |
-0,3462 |
0,3 |
0,075664 |
-0,27752 |
0,4 |
0,127877 |
-0,19762 |
0,5 |
0,188857 |
-0,10685 |
0,6 |
0,255223 |
-0,00548 |
0,7 |
0,323145 |
0,10636 |
0,8 |
0,388285 |
0,228655 |
0,9 |
0,44575 |
0,361553 |
1 |
0,490053 |
0,505358 |
1,1 |
0,515071 |
0,660539 |
1,2 |
0,514025 |
0,827735 |
1,3 |
0,479462 |
1,007753 |
1,32 |
0,467822 |
1,045378 |
1,4 |
0,403238 |
1,201567 |
1,5 |
0,276527 |
1,41031 |
1,6 |
0,089828 |
1,635264 |
1,65 |
-0,02917 |
1,754259 |
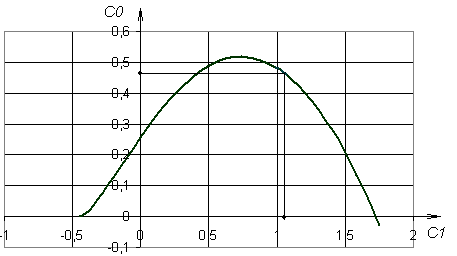
Рис. 18. Кривая оптимальных настроек ПИ-регулятора каскадной системы
Выбираем
параметры настройки регулятора на
частоте
,
![]()
![]() .
.
![]() ,
,
![]() ;
;
![]()
![]() .
.
![]() .
(58)
.
(58)
Настройки П-регулятора будут определяться выражением:
![]() (59)
(59)
Воспользуемся выражением (26):
(60)
Подставим s = -m + j в выражение (60) и получим:
![]()
Выделим вещественную часть

![]() (61)
(61)
При m=0,221
![]()
![]() (62)
(62)
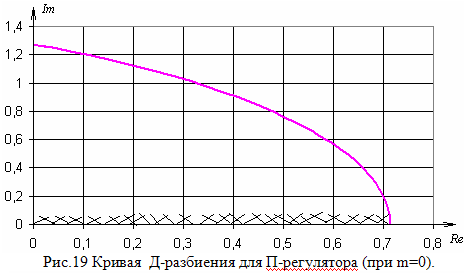
При m=0
![]()
![]() (63)
(63)
По найденным выражениям строим кривую Д-разбиения и кривую оптимальной настройки П-регулятора.
Таблица 8.

Значения
П-регулятора могут изменяться в пределах
![]()
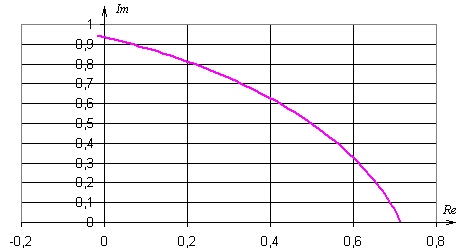
Рис.20. Кривая настройки П-регулятора (при m=0,221).
Выбираем параметр настройки П-регулятора:
![]() (64)
(64)