

5. Определение условий устойчивости системы
При исследовании системы важно определить пределы, в которых могут быть изменены те или иные параметры для сохранения устойчивости ее работы. Наиболее удобно производить выделение областей устойчивости на основе понятия о Д-разбиении [2].
5.1. Расчет устойчивости одноконтурной системы
Для определения устойчивости системы нам необходимо характеристическое уравнение одноконтурной системы (14), для этого выпишем его:
(29)
Параметры
![]() и
и
![]() входят в уравнение (29) линейно, тогда
приведем его к виду:
входят в уравнение (29) линейно, тогда
приведем его к виду:
![]() ,
т.е. (30)
,
т.е. (30)
![]() (31)
(31)
Подставляя в уравнение (30) s=jω, получим выражение для границы Д – разбиения
![]() ,
т.е. (32)
,
т.е. (32)
![]() (33)
(33)
где

Выделим из уравнения (32) вещественную и мнимую части, приравняв их отдельно к нулю.
![]() (34)
(34)
Решение системы (34) имеет вид:
![]() ;
;
![]() ,
(35)
,
(35)
где
![]()
![]()
![]()
С учетом сделанных расчетов параметры С0 и С1 будут определяться следующим образом:
![]() (36)
(36)
![]() (37)
(37)
Задаваясь значениями ω от 0 до ∞ строим границу Д – разбиения в плоскости параметров С0 и С1 (Рис.14). Расчетные данные приведены в Таблице 3.
Построим особые прямые при частоте ω=0 , тогда С0= 0, С1=-0,32.
Граница
Д – разбиения штрихуется слева, если
при изменении ω от -∞ до +∞ главный
определитель
![]() >0,
и справа, если
<0.
В данном случае
>0,
так как частота ω изменяется в пределах
от 0 до +∞. При изменении ω от -∞ до +∞ мы
обходим кривую Д – разбиения два раза
и поэтому она штрихуется всегда двойной
штриховкой.
>0,
и справа, если
<0.
В данном случае
>0,
так как частота ω изменяется в пределах
от 0 до +∞. При изменении ω от -∞ до +∞ мы
обходим кривую Д – разбиения два раза
и поэтому она штрихуется всегда двойной
штриховкой.
Штриховка особых прямых производится так, чтобы вблизи точки сопряжения особой прямой и кривой Д – разбиения, заштрихованные и не заштрихованные стороны прямой и кривой были направлены друг к другу.
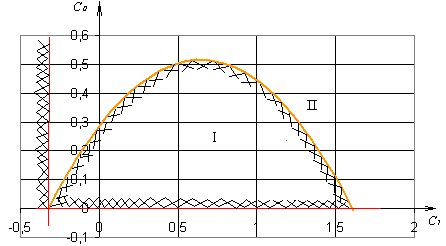
Рис.14. Кривая Д-разбиения для одноконтурной системы
Таблица 3.
|
|
|
0 |
0 |
-0,32 |
0,1 |
0,007572 |
-0,3129 |
0,2 |
0,029952 |
-0,2916 |
0,3 |
0,066132 |
-0,2561 |
0,4 |
0,114432 |
-0,2064 |
0,5 |
0,1725 |
-0,1425 |
0,6 |
0,237312 |
-0,0644 |
0,7 |
0,305172 |
0,0279 |
0,8 |
0,371712 |
0,1344 |
0,9 |
0,431892 |
0,2551 |
1 |
0,48 |
0,39 |
1,1 |
0,509652 |
0,5391 |
1,2 |
0,513792 |
0,7024 |
1,3 |
0,484692 |
0,8799 |
1,4 |
0,413952 |
1,0716 |
1,5 |
0,2925 |
1,2775 |
1,6 |
0,110592 |
1,4976 |
1,65 |
-0,00626 |
1,612975 |
Пусть
в области I
будет r
левых корней, тогда при переходе из
![]() во
во
![]() область происходит потеря одного корня
(При переходе слева на право мы теряем
корень, а с право налево приобретаем.).
Следовательно, область I
c
наибольшим числом левых корней. Проверим
найденную область на устойчивость с
помощью критерия Рауса-Гурвица. Чтобы
проверить действительно эта область
является областью устойчивости, зададимся
ранее найденными значениями
область происходит потеря одного корня
(При переходе слева на право мы теряем
корень, а с право налево приобретаем.).
Следовательно, область I
c
наибольшим числом левых корней. Проверим
найденную область на устойчивость с
помощью критерия Рауса-Гурвица. Чтобы
проверить действительно эта область
является областью устойчивости, зададимся
ранее найденными значениями
![]() ,
лежащими в этой области.
,
лежащими в этой области.
Подставим значения в характеристическое уравнение (27) и преобразуем его.
После преобразования получаем
![]()
Введем обозначения:
![]()
По коэффициентам характеристического уравнения составим определитель
![]()
Согласно критерию Рауса – Гурвица для того, чтобы система автоматического управления была устойчива, необходимо и достаточно, чтобы все определители были положительны.
![]()
![]()
![]()

Найденная область устойчива, так как все диагональные миноры положительны. Следовательно, пределы, в которых параметры ПИ-регулятора могут быть изменены для сохранения устойчивости системы, лежат в интервале:
![]() ,
,
![]()