

4. Выбор регуляторов и математическое описание системы управления
Задача настройки регулятора состоит в том, чтобы, располагая динамическими характеристиками объекта и регулятора, так выбрать и установить настроечные параметры регулятора, чтобы обеспечить оптимальный переходный процесс в автоматической системе.
Под оптимальными настройками регулятора будем понимать настройки, обеспечивающие для заданного объекта процесс регулирования, удовлетворяющий выбранным критериям качества.
Для коррекции динамических свойств системы применяются: пропорциональный (П), интегрирующий (И), пропорционально-интегрирующий (ПИ), пропорционально - интегрально-дифференциальный (ПИД) и пропорционально-дифференциальный (ПД) регуляторы.
Для регулирования температуры низы колонны, с помощью одноконтурной системы управления, будем использовать ПИ – регулятор.
Статическая ошибка у ПИ-регуляторов практически равна нулю, т.е. повышается точность регулирования. Также ПИ-регуляторы обладают достаточным быстродействием и дают возможность вывода параметра на заданный уровень.
У ПИ-регуляторов
воздействие входной величины на выход
тем больше, чем больше коэффициент
пропорциональности и меньше постоянная
интегрирования
![]() .
.
Уравнение динамики ПИ-регулятора:
 .
.
Передаточная функция:
![]() ,
где
,
где
![]() .
(10)
.
(10)
Схема одноконтурной системы управления представлена на рисунке 11.
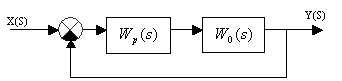
Рис. 11. Одноконтурная система управления
Где - передаточная функция объекта управления
![]() (11)
(11)
![]() -
передаточная функция ПИ- регулятора
(10)
-
передаточная функция ПИ- регулятора
(10)
![]()
Тогда передаточная функция разомкнутой системы будет иметь вид:
![]() (12)
(12)
Передаточная функция замкнутой системы имеет вид:
![]() (13)
(13)
Выпишем характеристическое уравнение системы:
![]() (14)
(14)
Для каскадной системы управления выбираем регуляторы П-ПИ – первый регулятор является стабилизирующим, а второй корректирующим. Эти регуляторы были выбраны благодаря ряду преимуществ. Колонна ректификации является инерционным объектом, поэтому необходимы регуляторы, которые отличаются быстродействием и работоспособностью на таких объектах, таким свойствами обладают П-регуляторы. Однако использование П-регуляторов возможно при допущении остаточного отклонения параметра от заданного. Автоматические регуляторы с пропорционально-интегральным законом регулирования объединили преимущества П- и И-регуляторов.
У регуляторов с пропорциональным законом регулирования выходная величина в пределах зоны регулирования изменяется пропорционально изменению входа.
Уравнение динамики П-регулятора:
![]() ,
,
где
![]() коэффициент пропорциональности.
коэффициент пропорциональности.
Передаточная функция П-регулятора, равная отношению выходной величины к входной имеет вид:
![]() .
.
Передаточная функция ПИ- регулятора (10):
, где .
Схема каскадной системы управления представлена на рисунке 12.
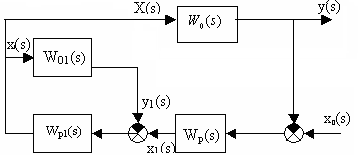
Рис. 12. Каскадная система управления
W0 (s) - передаточная функция объекта в основном контуре
W01(s) - передаточная функция объекта в вспомогательном контуре
Wp1(s) - передаточная функция стабилизирующего регулятора
Wp(s) – передаточная функция корректирующего регулятора.
Регуляторы по стабилизирующему и по корректирующему контуру имеют разный вид и разные значения параметров настройки.
Корректирующий регулятор:
![]() (15)
(15)
Стабилизирующий регулятор:
![]() (16)
(16)
Составим следующую систему уравнений:
![]()

![]() (17)
(17)
![]()
Из системы уравнений (17) исключаем промежуточные координаты Y1(s) и X(s), получим:
![]()
![]()
![]() (18)
(18)
В результате преобразований получаем передаточную функцию эквивалентного объекта включающего стабилизирующий контур:
![]() (19)
(19)
Предполагая,
что стабилизирующий регулятор практически
успевает отслеживать вспомогательную
величину y1
в соответствии с поступающим на него
заданием x,
т.е., что
![]() ,
тогда передаточная функция эквивалентного
объекта управления
,
тогда передаточная функция эквивалентного
объекта управления
![]() будет
иметь вид:
будет
иметь вид:
![]() (20)
(20)
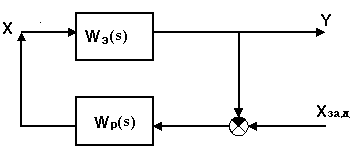
Рис.13. Одноконтурная система регулирования.
Передаточная функция разомкнутой системы, представленной на рис.13, равна:
![]() (21)
(21)
Передаточная функция замкнутой системы:
![]() (22)
(22)
Следовательно, характеристическое уравнение будет иметь вид:
![]() (23)
(23)
![]() (24)
(24)
Используя передаточную функцию разомкнутой системы, рассчитаем параметры настройки корректирующего регулятора, т.е. определим передаточную функцию Wр(s). Из уравнения (21) определяем:
![]() (25)
(25)
С учетом уравнения (20) получаем:
![]() (26)
(26)
Для определения настроек П - регулятора передаточная функция эквивалентного объекта имеет вид:
![]() (27)
(27)
Величина
![]() не
оказывает значительного влияния и его
можно не принимать во внимание, тогда:
не
оказывает значительного влияния и его
можно не принимать во внимание, тогда:
![]()
Воспользовавшись выражением (25) можно записать:
![]()
![]() (28)
(28)