

3.Математическое описание объекта управления.
Математическое описание объекта управления заключается в нахождении передаточной функции объекта управления.
Для определения математического описания объекта воспользуемся методом площадей, предложенным М.П. Симою[2]. Определение математической модели, возможно, произвести с использованием кривой разгона. В основе метода лежит предположение, что исследуемый объект может быть описан линейным дифференциальным уравнением с постоянными коэффициентами:
![]() (1)
(1)
где,
![]() – постоянные
коэффициенты;
– постоянные
коэффициенты;
![]() - приведенное к
единице отклонение
- приведенное к
единице отклонение
![]() - приведенное
к единице возмущающее воздействие в
безразмерном виде.
- приведенное
к единице возмущающее воздействие в
безразмерном виде.
Рассмотрим заданную кривую разгона.

Рис.6. Исходная кривая разгона с приведенными значениями по оси ординат.
Так как значение регулируемой величины и ее первая производная при t = 0 равны нулю, то в передаточной функции порядок числителя, по крайней мере меньше порядка знаменателя на две единицы. С учетом этого передаточная функция объекта будит иметь вид:
![]() (2)
(2)
где
![]()
Задача состоит в том, чтобы определить неизвестные коэффициенты.
Перед тем как преступить к определению коэффициентов передаточной функции, необходимо выполнить следующие предварительные преобразования:
ось времени разбить на n равных интервалов по ∆t (в нашем случае ось времени разбита на 26 интервалов по ∆t = 14с);
по оси ординат откладываются приведенные значения ординат соответствующих точек, т.е. по оси ординат откладывается величина
;
Таблица 1.

график кривой разгона перестраивается таким образом, чтобы он умещался в квадрат образованный линиями сетки графика.
Коэффициенты определяются из следующей системы уравнений:
(3)![]()
С учетом выражения (2) система уравнений (3) преобразуется к виду:
(4)![]()
(5)
(6)
(7)
В формулах (5) – (7):
![]()
3.1. Математическое описание объекта управления с помощью программы rkpf.
Для нахождения математического описания объекта управления по заданной кривой разгона воспользуемся программой RKPF , которая значительно облегчает задачу. Алгоритм этой программы основан на определении коэффициентов передаточной функции с помощью метода площадей, описанного выше.
Для этого:
1. При запуске программы необходимо указать входные значения в появившемся диалоговом окне:
Выбираем процесс с самовыравниванием.
Рис.7.
Рис.8.
В
данном опыте показания снимались 26 раз
с интервалом времени в 14 сек. Ступенчатое
входное воздействие, вызвавшее переходный
процесс, подавалось изменением температуры
от 44
![]() до 69
.
до 69
.
После ввода входных параметров нажмем кнопку «ОК».
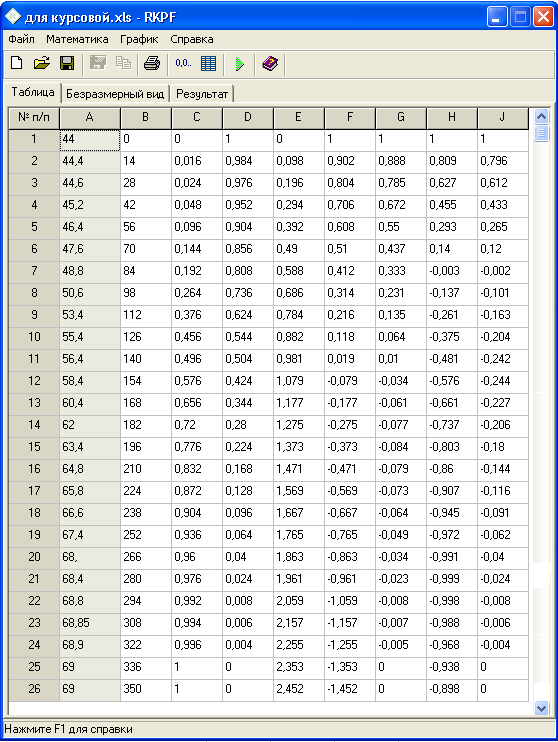
Ось времени разбита на равные интервалы с шагом 14 сек, введем в таблицу значения входного сигнала соответствующего каждому интервалу времени.

Рис.9.
После
ввода последнего снятого значения
загорится кнопка
![]() "Вычислить" (зелёный треугольник
на панели инструментов) на который
необходимо нажать для получения
результата.
"Вычислить" (зелёный треугольник
на панели инструментов) на который
необходимо нажать для получения
результата.
Результат будет Вам представлен в следующем виде:
– таблица вычислений (таблица 2.);
Где:
A – xвых , значения снятой экспериментальной кривой;
B – t , временной интервал (шаг квантования по времени);
С – , приведённое к единице отклонение регулируемой величины в
безразмерном виде;
D – (1 – );
E – = t /F1;
F – (1 – );
G – (1 – )(1 – );
H – 1 – 2 + 2/2;
J – (1 – )(1 – 2 + 2/2).
Таблица 2.
– график кривой разгона в безразмерном виде (синяя - построена по введённым в таблицу значениям, коричневая - построена по найденной передаточной функции);

Рис.10.
Тогда передаточная функция объекта в корректирующем контуре запишется в виде
(8)![]()
где
![]()
Коэффициенты передаточной функции:
![]()
Так же как и при любой аппроксимации необходимо определить ошибку:
![]()
Согласно техническому заданию передаточная функция объекта в стабилизирующем контуре равна:
![]() (9)
(9)
где
 1,4
мин-1
1,4
мин-1 15
с =0,25 мин
15
с =0,25 мин 6
с =0,1 мин
6
с =0,1 мин