

Способы определения координат центра тяжести
Исходя из полученных ранее общих формул, можно указать способы определения координат центров тяжести твердых тел:
1 Аналитический (путем интегрирования).
2 Метод симметрии. Если тело имеет плоскость, ось или центр симметрии, то его центр тяжести лежит соответственно в плоскости симметрии, оси симметрии или в центре симметрии.
3 Экспериментальный (метод подвешивания тела).
4 Разбиение. Тело разбивается на конечное число частей, для каждой из которых положение центра тяжести C и площадь S известны. Например, проекцию тела на плоскость xOy (рисунок 1.8) можно представить в виде двух плоских фигур с площадями S1 и S2 (S = S1 + S2). Центры тяжести этих фигур находятся в точках C1(x1, y1) и C2(x2, y2). Тогда координаты центра тяжести тела равны
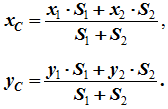
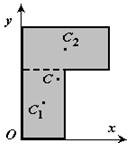
Рисунок 1.8
5 Дополнение (метод отрицательных площадей или объемов). Частный случай способа разбиения. Он применяется к телам, имеющим вырезы, если центры тяжести тела без выреза и вырезанной части известны. Например, необходимо найти координаты центра тяжести плоской фигуры (рисунок 1.9):
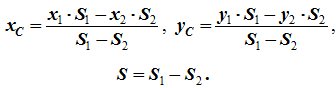
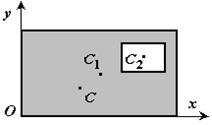
Рисунок 1.9
Тема 2. Связи и их реакции
Тело, которое может совершать из данного положения любые перемещения в пространстве, называется свободным.
Тело, перемещениям которого препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным. Все то, что ограничивает перемещение данного тела, называют связью.
Сила, с которой данная связь действует на тело, препятствующая тем или иным его перемещениям, называется реакцией связи. Реакция связи направлена в сторону противоположную той, куда связь не дает перемещаться телу.
Принцип освобождаемости от связей: несвободное твердое тело можно рассматривать как свободное, если его мысленно освободить от связей,заменив их действие реакциями. В статике этот принцип позволяет рассматривать равновесие несвободного твердого тела как свободного под действием активных (заданных) сил и реакций связей.
Рассмотрим наиболее часто встречающиеся типы связей на плоскости и направления их реакций.
1. Гладкая плоскость (поверхность) или опора
Р
 еакция N гладкой
плоскости (поверхности) или опоры
направлена по общей нормали к поверхностям
соприкасающихся тел в точке их касания
и приложена к этой точке.
еакция N гладкой
плоскости (поверхности) или опоры
направлена по общей нормали к поверхностям
соприкасающихся тел в точке их касания
и приложена к этой точке.
2 . Гибкая нить (провода, канаты, цепи, ремни)
Реакция Т направлена вдоль нити к точке подвеса.
3 . Невесомый стержень с шарнирами
Реакция N невесомого стержня направлена вдоль стержня. Обычно реакция Nизображается от тела по стержню, в предположении, что в равновесии стержень растянут.
4 . Неподвижный
цилиндрический шарнир или подшипник
. Неподвижный
цилиндрический шарнир или подшипник
Реакция RA цилиндрического шарнира может иметь любое направление в плоскости, перпендикулярной оси вращения, т. е. в плоскости Аху. Обычно ее раскладывают на две составляющие ХА и YA по двум взаимноперпендикулярным направлениям.
5. Шарнирно-подвижная опора (опора на катках)
Р еакция R проходит
через ось шарнира и направлена
перпендикулярно к опорной плоскости.
еакция R проходит
через ось шарнира и направлена
перпендикулярно к опорной плоскости.