

Составление уравнений кинетостатики.
Составление уравнений кинетостатики начнем с рассмотрения группы внешнего слоя – группы ВВП.
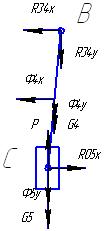
Группа ВВП.
Fx: R45x + R05x = 0
Fy: P + Ф5y – G5 + R45y = 0
Fx: R34x + Ф4x + R54x = 0
Fy: R34y + Ф4y – G4 + R54y = 0
M(c): - R34y(xc - xb) – R34x(yb – yc) – Ф4x(ys4 – yc) + (Ф4y – G4)(xs4 – xc) + М4 = 0
Группа ВВВ.
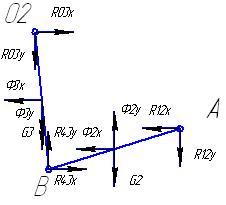
Fx: R12x + R43x + R03x + Ф2x + Ф3x = 0
Fy: R12y + R43y – G2 – G3 + R03y + Ф2y + Ф3y = 0
M(B)2: R12x(yb – ya) + R12y(xa – xb) + Ф2x(yb - ys2) + (Ф2y – G2)(xs2 – xb) + M2 = 0
M(B)3: R03y(xo2 – xb) – R03x(yo2 – yb) + (Ф3y – G3)(xs3 – xb) – Ф3x(ys3 – yb) + M3 = 0
Кривошип.
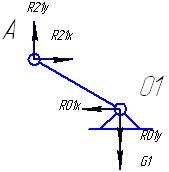
Fx: R01x + R21x = 0
Fy: R01y + R21y – G1 = 0
M(o1): R21y*xa – R21x*ya + Q = 0
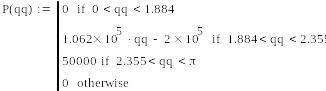
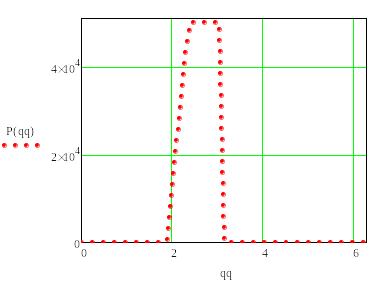
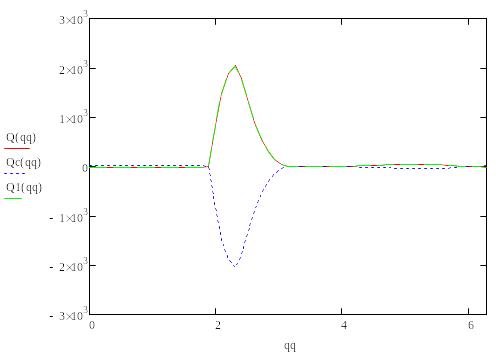
Зависимость рабочей нагрузки Р от входной координаты q
![]()
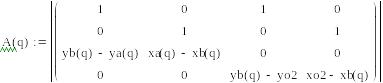
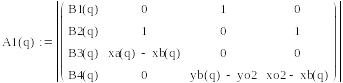
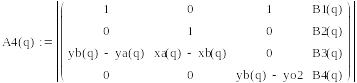
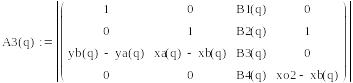
Аналитическое решение уравнений кинетостатики
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Определение движущего момента механизма с помощью
уравнений кинетостатики и с помощью общего уравнения динамики
Определение движущего момента из общего уравнение динамики. Дадим системе какое-нибудь возможное перемещение. Все точки ее получат перемещения. Затем вычислим работу всех сил на этих перемещениях. Так как силы, приложенные к каждой точке уравновешиваются и , то сумма работ этих сил на перемещении будет равна нулю . Значит и сумма работ всех сил, приложенных ко всем точкам, будет равна нулю . При равновесии материальной системы с идеальными и стационарными связями сумма работ всех активных, задаваемых, сил на любом возможном перемещении системы из положения равновесия равна нулю. |
|
![]()
![]()

Определение потребляемой мощности двигателя
Двигатель выбираем по необходимой (эквивалентной) мощности, т.е. такой мощности, которая требуется для того, чтобы механизм, испытывающий воздействие заданных сил, совершал требуемые движения.
![]()
Выбор двигателя
В курсовом проекте предлагается использовать электрический двигатель постоянного тока независимого возбуждения серии 2П. Такой двигатель имеет линейную статическую характеристику, что упрощает расчет установившегося режима и режима разбега.
Выбираем двигатель по среднеквадратичной мощности, данный выбор необходим для соблюдения условия Mдн *i> Q0
N=0.55 кВт
Выбираем двигатель 2ПН90L
Параметры двигателя
Паспортные данные двигателя
Электрический постоянного тока независимого возбуждения.
Мощность Nдн, кВт =0,55
Номинальное число оборотов ротора двигателя nдн, об/мин =1500
Номинальный ток Iн, А =2.6
Активное сопротивление якорной цепи Rя, Ом =5.44
Номинальное напряжение Uн, В =220
Реактивное сопротивление якорной цепи (индуктивность) Lя, Гн =132
Осевой момент инерции ротора двигателя Yр, кг*м2=0.005
Коэффициент перегрузки ϒ=2