

2.5.2 Управление частотой и величиной питающего напряжения при
заторможенном роторе.
Ротор АТД тепловоза находится в заторможенном состоянии, пока суммарный момент электродвигателей не превысит момент сопротивления движению поезда. Наращивание частоты тока статора производится равномерно с приращением 0,2 Гц.
Режим характеризуется тем, что частота тока ротора равна частоте тока статора, т.е. а = р. Напряжение питания двигателя является функцией частоты тока ротора и вычисляется согласно выражениям и раздела 2.5.1. Расчет параметров АТД изложен в разделе 2.3. Заканчивается режим, когда тяга тепловоза превысит силу сопротивления движению поезда.
2.5.3 Управление напряжением на статоре АТД пропорционально частоте (режим разгона).
Этот режим наступает при трогании, когда скорость движения поезда уже не равна нулю, то есть частота тока статора уже не равна частоте тока ротора. Наращивание частоты тока статора производится исходя из заданного ускорения движению поезда, согласно следующим соображениям:
![]() ;
;
где а-заданное
ускорение движению поезда; [м/с ]
t-
промежуток
времени; [с]
![]() -
скорость
движения поезда в начале заданного
промежутка
-
скорость
движения поезда в начале заданного
промежутка
времени; [м/с] V2-
скорость
движения поезда в конце заданного
промежутка времени; [м/с] Учтя,
что
![]() и
и
![]() можно
получить
можно
получить
![]()
где
![]() -
приращение
частоты тока статора за время м.
-
приращение
частоты тока статора за время м.
Частота тока
статора тогда составит величину
![]() .
Напряжение питания АТД вычисляется по
выражениям раздела 2.5.1, а расчет его
характеристик согласно разделу 2.3. Если
же, при расчете, окажется, что частота
тока ротора близка к критической
частоте, на данном шаге расчета приращение
частоты тока статора уменьшается на
0,1 его значения. Данный режим заканчивается
достижением напряжения фазы своего
номинального значения.
.
Напряжение питания АТД вычисляется по
выражениям раздела 2.5.1, а расчет его
характеристик согласно разделу 2.3. Если
же, при расчете, окажется, что частота
тока ротора близка к критической
частоте, на данном шаге расчета приращение
частоты тока статора уменьшается на
0,1 его значения. Данный режим заканчивается
достижением напряжения фазы своего
номинального значения.
2.5.4 Управление частотой тока статора и ротора при постоянном напряжении фазы.
При достижении номинального режима работы АТД, то есть когда частота тока статора и напряжение питания имеют номинальное значение, дальнейшее увеличение скорости движения поезда (т.е. частоты тока статора) производится при постоянном напряжении, равном номинальному. При этом ток двигателя и его мощность будут уменьшаться. Для поддержания, в таком режиме, магнитного потока двигателя необходимо с увеличением частоты тока статора увеличивать частоту тока ротора, таким образом, чтобы ток двигателя при этом сохранялся постоянным. Расчет режима производится аналогично предыдущему разделу с контролем частоты тока ротора. Режим заканчивается, когда частота тока ротора приблизится к критическому значению, либо сила тяги станет равной предельной силе тяги по сцеплению колеса с рельсом.
2.5.5 Управление частотой тока статора при постоянном напряжении питания и частоте тока ротора
Увеличение скорости движения поезда, т.е. наращивание частоты тока статора в этом режиме осуществляется при постоянном напряжении питания АТД и постоянной, близкой к критической, частоте тока ротора. При этом ток, мощность и магнитный поток двигателя, а соответственно и момент на валу будут падать. Тяговый момент двигателя в этом случае рассчитывается согласно выражению [ ].

Расчет характеристик работы АТД в этом режиме производится аналогично
разделу 2.5.3.
3 ОПИСАНИЕ ПРОГРАМНО-АЛГОРИТМИЧЕСКОГО КОМПЛЕКСА
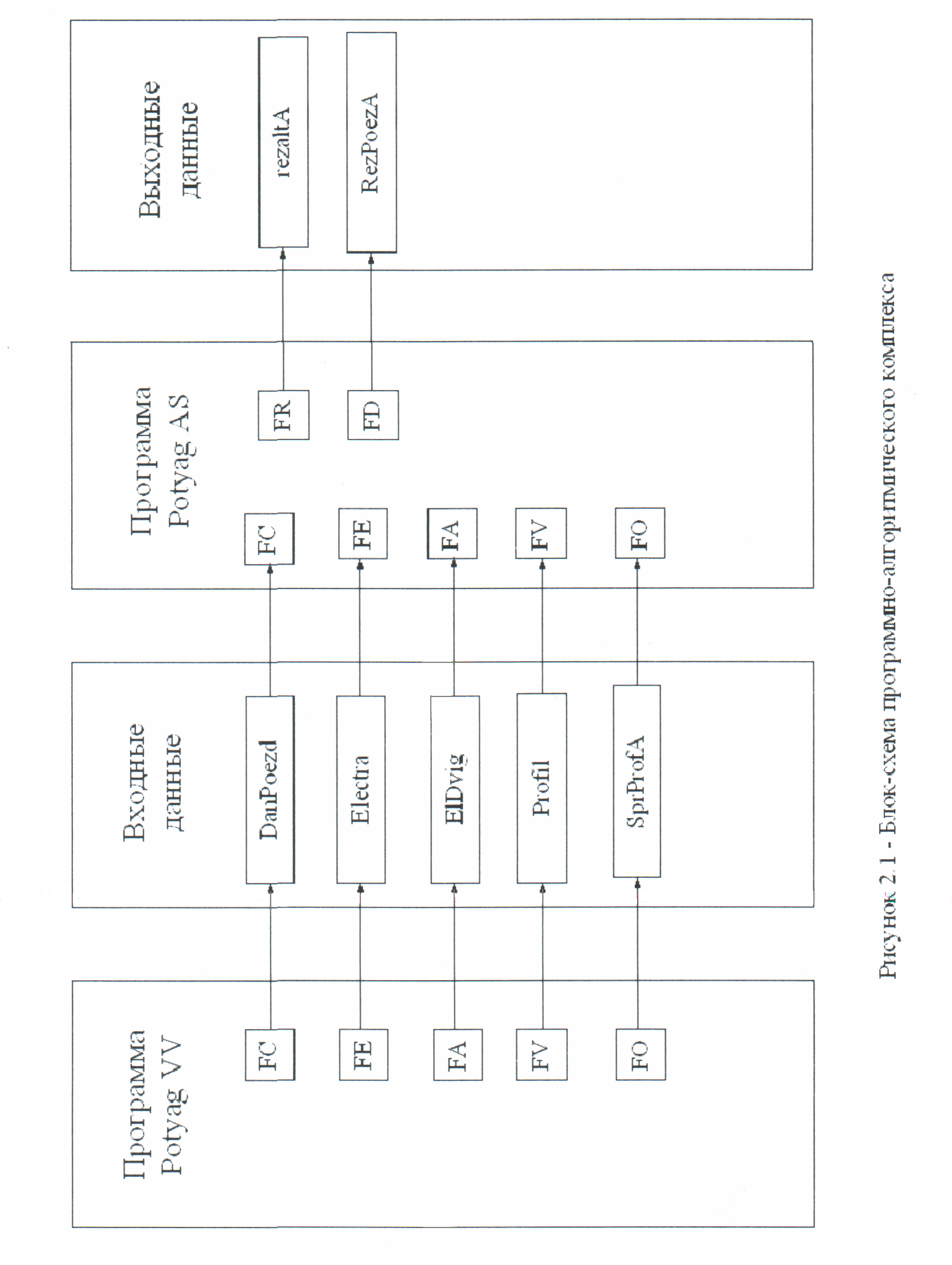
Блок-схема программно-алгоритмического комплекса (ПАК) представлена на рис.2.1. ПАК состоит из двух программ, написанных на языке PASCAL: PotyagVV.pas, PotyagA.pas.
Программа PotyagVV предназначена для ввода исходных данных в ПАК и записи этих данных на диск в файлы данных. Кроме того, программа производит, при необходимости, спрямление профиля пути.
Программа PotyagA предназначена для расчета кривых движения поезда по перегону и определению текущих значений тока генератора, мощности и расхода топлива дизелем тепловоза, потребных для обеспечения этого движения. Программа производит расчет режимов работы асинхронных тяговых электродвигателей тепловоза.
Кроме указанных выше программ ПАК включает еще 7 файлов данных, которые обязательно должны присутствовать на диске: Profil.dat, SprProfA.dat, DanPoezd.dat, EIectra.dat, ElDvig.dat, RezultA.dat, RezPoezA.dat.
Программа PotyagVV использует следующие файлы данных:
Физический файл Profil.dat, который связывается программой с логическим файлом FV, предназначен для хранения следующих данных профиля пути (очередность перечисляемых данных соответствует очередности их записи на диск):
N - количество участков профиля;
LfiJ - длина i участка, м;
RadfiJ - радиус кривой /-го участка, м; (при отсутствии кривой на участке радиус кривой принимается равным нулю);
DIRdsfiJ - длина кривой /-го участка, м; (при отсутствии кривой на участке длина кривой принимается равной нулю);
Uklfi] - величина уклона /-го участка, %о.
Физический файл SprProfA.dat, который связываетса программой с логическим файлом FO, предназначен для хранения данных спрямленного профиля пути при движении от подстанции А и содержит следующие данные:
RezLfiJ - длина /-го спрямленного участка пути, м;
RezUklfiJ - уклон /-го спрямленного участка пути, %о ;
PrUklRezfiJ - приведенный уклон /-го спрямленного участка пути от наличия на нем кривой, %о.
Физический файл DanPoezd.dat, который связывается программой с логическим файлом FC, предназначен для хранения данных о составе поезда и предельных параметрах его движения и содержит следующие данные:
ObKolVag - общее количество вагонов в составе, шт.;
Vag8 - количество 8-осных вагонов в составе, шт.;
Vag6 - количество 6-осных вагонов в составе, шт.;
Vag4 - количество 4-осных вагонов в составе, шт.;
MasSos - масса состава, т;
SkorZad - заданная скорость движения состава по перегону, км/ч;
UskZad - допустимое продольное ускорение
поезда при движении по перегону, м/с2.
Физический файл Electra.dat, который связывается программой с логическим файлом FE, предназначен для хранения данных о параметрах тепловоза и содержит следующие данные:
ти - передаточное отношение тягового редуктора;
Kdv - количество тяговых электродвигателей, шт.;
DILok - длина тепловоза, м;
LokMas - масса тепловоза, т.
Физический файл ElDvig.dat, который связывается программой с логическим
файлом FA, предназначен для хранения данных асинхронного тягового двигателя и содержит следующие данные:
Unl — номинальное линейное напряжение питания, В;
Inf— номинальный ток фазы, А;
Pnd - мощность АТД продолжительного режима, кВт; /п - номинальная частота тока статора, Гц;
р - число пар полюсов;
Ns ~ число пазов статора;
Dk - диаметр колеса тепловоза, м;
sn - номинальное скольжение ротора;
kpd- кл.д. АТД;
cofi - коэффициент мощности;
Isras - расчетная длина статора, м;
Dsr - диаметр расточки статора, м;
bzub - ширина коронки зубца статора, м;
Rs - активное сопротивление фазы статора, Ом;
Rrp — активное сопротивление фазы ротора, приведенное к обмотке статора, Ом;
Хгр - реактивное сопротивление фазы ротора, приведенное к обмотке статора, Ом;
ml — количество фаз АТД;
delta - рабочий зазор, м;
Wvf— число витков фазы двигателя;
Xs - реактивное сопротивление фазы статора, Ом;
ХО - реактивное сопротивление контура намагничивания, Ом;
f2n - номинальная частота тока ротора, Гц;
Мп - номинальный момент на валу АТД, кН-м.
Физический файл RezultA.dat, который связывается программой с логическим файлом FR, предназначен для хранения текущих данных времени
движения, тока генератора, текущего значения мощности и потребленного тепловозом топлива, силы тяги и пройденного поездом пути при его движении от станции и содержит следующие данные:
Vrem - текущее время движения поезда, с;
Skor - текущее значение скорости движения поезда, км/ч;
Put - путь, пройденный поездом на данное время, м;
UklOb - вертикальный профиль пути, м;
Itep2v - мгновенное значение тока, вырабатываемого тяговым генератором тепловоза, А;
Pte - текущее значение мощности дизеля тепловоза, кВт;
Tyaga — текущее значение силы тяги тепловоза, Н;
RasTop - текущее значение топлива,
расходуемого дизелем тепловоза на тягу, г.
Физический файл RezPoezA.dat связывается программой с логическим файлом FD, предназначен для хранения рассчитанных программой значений тока тягового генератора тепловоза и расстояния, пройденного поездом от станции, и содержит следующие данные:
Vrem - текущее время движения поезда, с;
Put - путь пройденный поездом на данный момент времени, м;
Itep2v - мгновенное значение тока, вырабатываемого генератором тепловоза, А;