

Вопрос 15.
 При
анализе ОЭС и ЕЭС возникает необходимость
поиска экстр. нелинейной функции на
множестве точек, удовлетворяющих
нелинейным неравенствам.
При
анализе ОЭС и ЕЭС возникает необходимость
поиска экстр. нелинейной функции на
множестве точек, удовлетворяющих
нелинейным неравенствам.
Отсюда возникла теория экстремума в нелинейных задачах с ограничениями. Необходимое и достаточное условие существования такого экстремума было сформулировано Куном и Такером.
Теорема Куна-Такера
Если
Ц(х)- целевая функция, g(х)-
огр-я в форме неравенств, то для того,
чтобы точка х была опт-й, т.е. Ц(х0)=min
Ц(х) необходимо и достаточно, чтобы
существовала точка
,
которую совместно с х
![]() ,
образовало бы седло функции Лагранжа.
,
образовало бы седло функции Лагранжа.
Функция Лагранжа:
![]()
т.е.
чтобы
![]() .
Если L(х)
и Ц(х) дифференциальные функции, то
седловая точка может быть найдена из
следующих условий:
.
Если L(х)
и Ц(х) дифференциальные функции, то
седловая точка может быть найдена из
следующих условий:
![]()
![]()
Если ограничения записаны в форме равенств, в таком случае условия Кауна-Такера сводятся к применению метода множ-й Лагранжа
1 6
Применение методов возможных направлений
для поиска экстремума целевой функции
при решении задач оптимизации в
электроэнергетике. Возможные направления.
Градиент и антиградиент целевой функции.
Способы задания длинны шага. Метод
оптимизации при постоянной длине шага.
6
Применение методов возможных направлений
для поиска экстремума целевой функции
при решении задач оптимизации в
электроэнергетике. Возможные направления.
Градиент и антиградиент целевой функции.
Способы задания длинны шага. Метод
оптимизации при постоянной длине шага.
Методы возможных направлений.
Методы
относятся к классу итеративных методов,
в которых строится последовательность
точек
![]() ,
стремящихся к абсолютному экстремуму
целевой функции
,
стремящихся к абсолютному экстремуму
целевой функции![]() на основании критерия оптимизации, т.е.
на основании критерия оптимизации, т.е.
![]() ,
,
![]() лучше,
чем
лучше,
чем
![]() .
.
С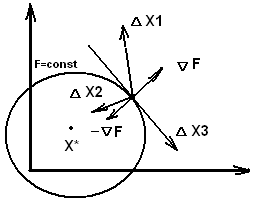 уть
методов возможных направлений заключается
в том, что спуск от начального приближения
уть
методов возможных направлений заключается
в том, что спуск от начального приближения
![]() до абсолютного экстремума
до абсолютного экстремума
![]() может осуществляться различными
направлениями, называемыми возможными.
может осуществляться различными
направлениями, называемыми возможными.
![]() -
рост целевой функции
-
рост целевой функции
![]()
![]() -
уменьшение
-
уменьшение
![]() -
-
![]()
![]() -
возможные направления
-
возможные направления
Вектор, ортогональный к касательной функции, указывающий направление роста целевой функции называется градиентом целевой функции.
![]() -градиент
целевой функции
-градиент
целевой функции
- - антиградиент является наилучшим из возможных направлений, указывающий путь наискорейшего убывания целевой функции.
Способы задания длины шага
![]() ,
,
где
![]() -
длина шага вдоль вектора
-
длина шага вдоль вектора
![]() ;
;
- направление спуска на К-ом шаге.
Все методы нелинейного программирования, основанные на данном соотношении можно разделить на 2 класса по способу задания длины шага:
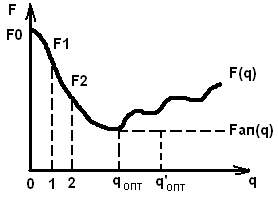
Класс основан на постоянной длине шага

Исходная длина шага задается примерно. Но при неудачно заданной длине шага может не выполняться критерий оптимизации, т.е.
16-1

![]() нарушение
критерия оптимизации, отсюда следует
нарушение
критерия оптимизации, отсюда следует
![]() ,
,
![]() ,
,
![]() .
.
Достоинством этих методов является малый объем вычислений на каждом шаге.
Недостатки
– при неудачно заданных значениях длины
шага q
и
![]() ,
возможно большое количество шагов
оптимизации, и следовательно, большой
объем вычислений.
,
возможно большое количество шагов
оптимизации, и следовательно, большой
объем вычислений.
Класс - метод наискорейшего спуска
длина
шага зависит от направления спуска
![]() и вычисляется из условия наискорейшего
убывания целевой функции
и вычисляется из условия наискорейшего
убывания целевой функции
![]()
![]()
Для
того, чтобы найти оптимальное значение
длины шага
![]() необходимо
продифференцировать по длине шага и
приравнять к нулю:
необходимо
продифференцировать по длине шага и
приравнять к нулю:
:
![]()
![]()
 -
данная функция может быть нелинейной
относительно q,
и поэтому
-
данная функция может быть нелинейной
относительно q,
и поэтому
![]() аппроксимируют полиномом 2-ой степени
аппроксимируют полиномом 2-ой степени
![]()
![]() псевдооптимальная
длина шага
псевдооптимальная
длина шага
![]()
Найти
![]() ?
?
![]()
![]()
![]()