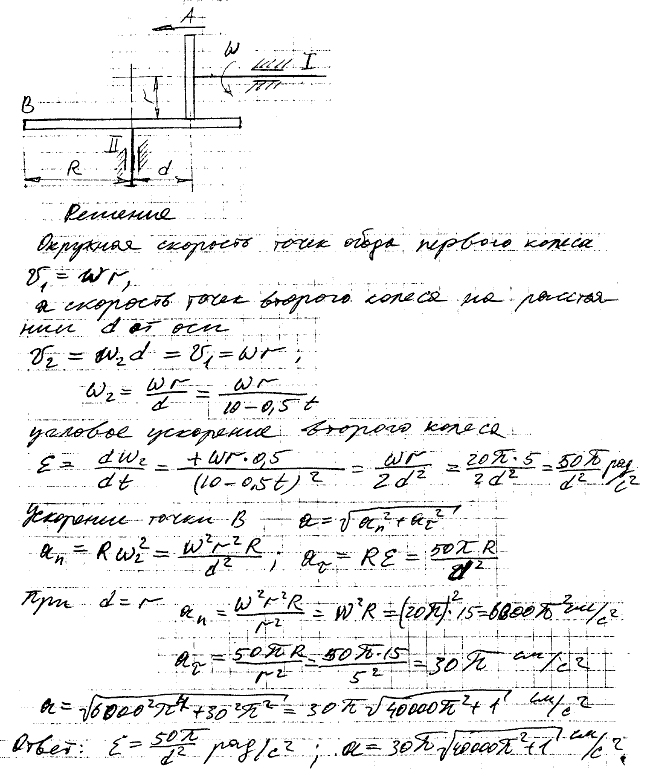
1) Угловое ускорение вала II как функцию расстояния d;
2) ускорение точки на ободе колеса B в момент, когда d=r, даны радиусы фрикционных колес: r=5 см, R=15 см.
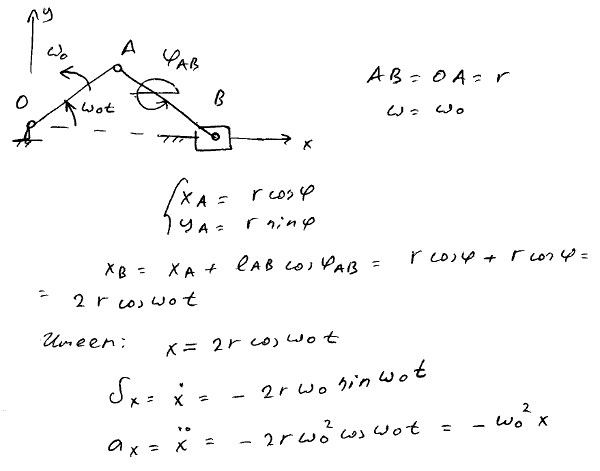
14.11 Найти закон движения, скорость и ускорение ползуна B кривошипно-ползунного механизма OAB, если длины шатуна и кривошипа одинаковы: AB=OA=r, а вращение кривошипа OA вокруг вала O равномерно: ω=ω0. Ось x направлена по направляющей ползуна. Начало отсчета расстояний — в центре O кривошипа.
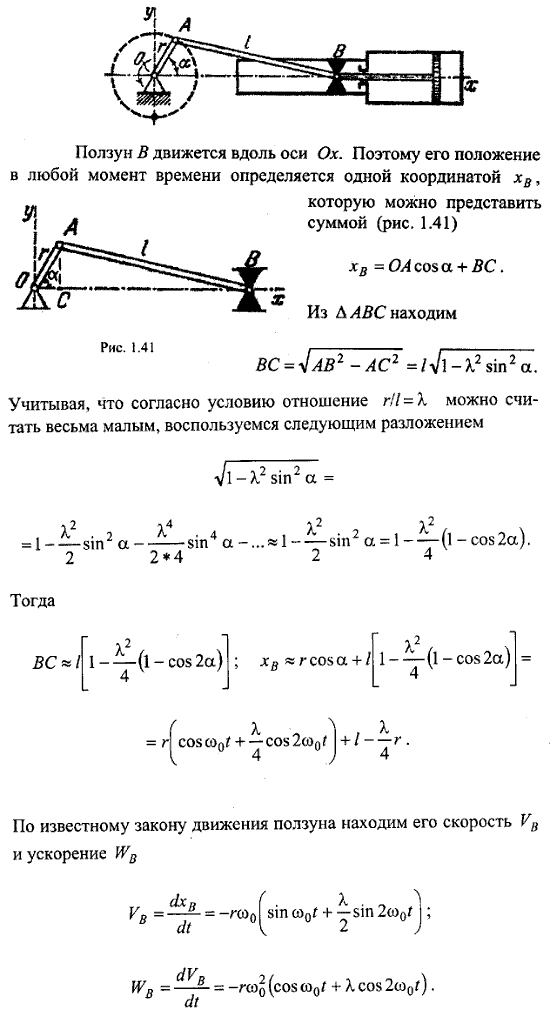
14.12 Определить закон движения, скорость и ускорение ползуна B кривошипно-ползунного механизма, если кривошип OA вращается с постоянной угловой скоростью ω0. Длина кривошипа OA=r, длина шатуна AB=l.
Ось Ox направлена по направляющей ползуна. Начало отсчета — в центре O кривошипа. Отношение r/l=λ следует считать весьма малым (λ<<1); α=ω0t.
14.13 Найти закон движения стержня, если диаметр эксцентрика d=2r, а ось вращения O находится от оси диска C на расстоянии OC=a, ось Ox направлена по стержню, начало отсчета — на оси вращения, a/r=λ.

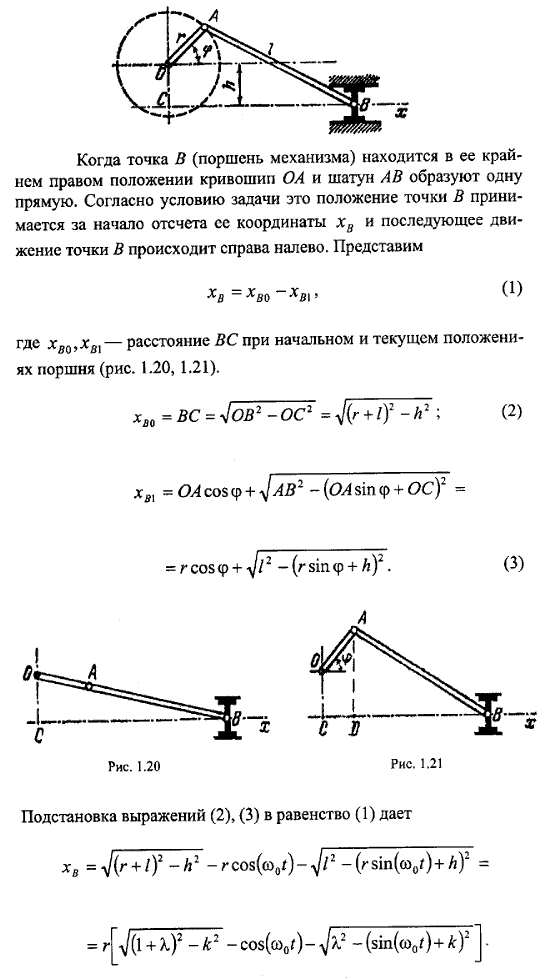
4.14 Написать уравнение движения поршня нецентрального кривошипно-ползунного механизма. Расстояние от оси вращения кривошипа до направляющей линейки h, длина кривошипа r, длина шатуна l; ось Cx направлена по направляющей ползуна. Начало отсчета расстояний — в крайнем правом положении ползуна; l/r=λ, h/r=k, φ=ω0t.
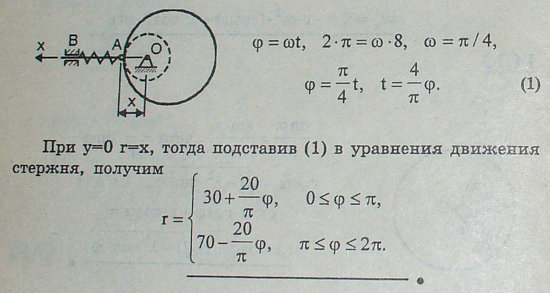
4.15 Кулак, равномерно вращаясь вокруг оси O, создает равномерное возвратно-поступательное движение стержня AB. Время одного полного оборота кулака 8 с, уравнения движения стержня в течение этого времени имеют вид (x — в сантиметрах, t — в секундах)
x = 30 + 5t, 0 ≤ t ≤ 4,
x = 70 - 5t, 4 ≤ t ≤ 8.
Определить уравнения контура кулака и построить график движения стержня.
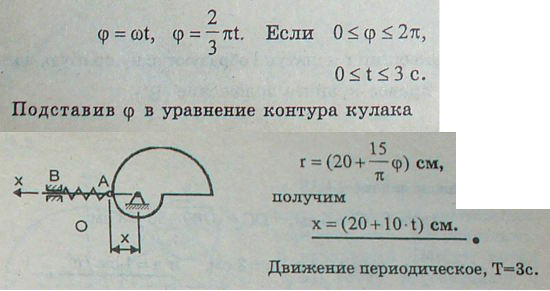
4.16 Найти закон движения и построить график возвратно-поступательного движения стержня ab, если задано уравнение профиля кулака
r = (20 + 15φ/π) см, 0 < φ < 2π.
Кулак равномерно вращается с угловой скоростью, равной 2π/3 рад/с.
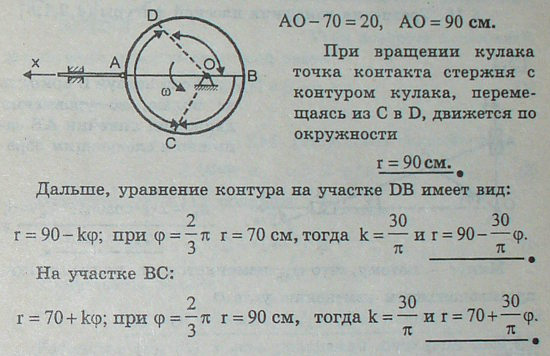
4.17 Написать уравнение контура кулака, у которого полный ход стержня h=20 см соответствовал бы одной трети оборота, причем перемещения стержня должны быть в это время пропорциональны углу поворота. В течение следующей трети оборота стержень должен оставаться неподвижным, и, наконец, на протяжении последней трети он должен совершать обратный ход при тех же условиях, что и на первой трети. Наименьшее расстояние конца стержня от центра кулака равно 70 см.
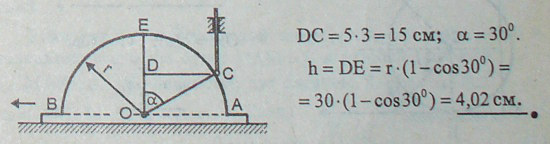
4.18 Найти, на какую длину опускается стержень, опирающийся своим концом о круговой контур радиуса r=30 см кулака, движущегося возвратно-поступательно со скоростью v=5 см/с. Время опускания стержня t=3 с. В начальный момент стержень находится в наивысшем положении.
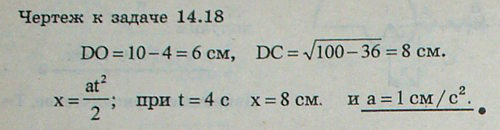
4.19 Найти ускорение кругового поступательного движущегося кулака, если при его равноускоренном движении без начальной скорости стержень опустился за 4 с из наивысшего положения на h=4 см. Радиус кругового контура кулака r=10 см. (См. рисунок к задаче 14.18.)
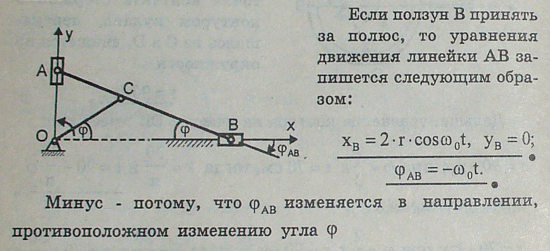
15.1 Линейка эллипсографа приводится в движение кривошипом OC, вращающимся с постоянной угловой скоростью ω0 вокруг оси O. Приняв ползун B за полюс, написать уравнения плоского движения линейки эллипсографа, если OC=BC=AC=r. В начальный момент линейка AB была расположена горизонтально.
15.2 Колесо радиуса R катится без скольжения по горизонтальной прямой. Скорость центра C колеса постоянная и равна v. Определить уравнения движения колеса, если в начальный момент ось y', жестко связанная с колесом, была вертикальна, а неподвижная ось y проходила в это время через центр C колеса. За полюс принять точку C.

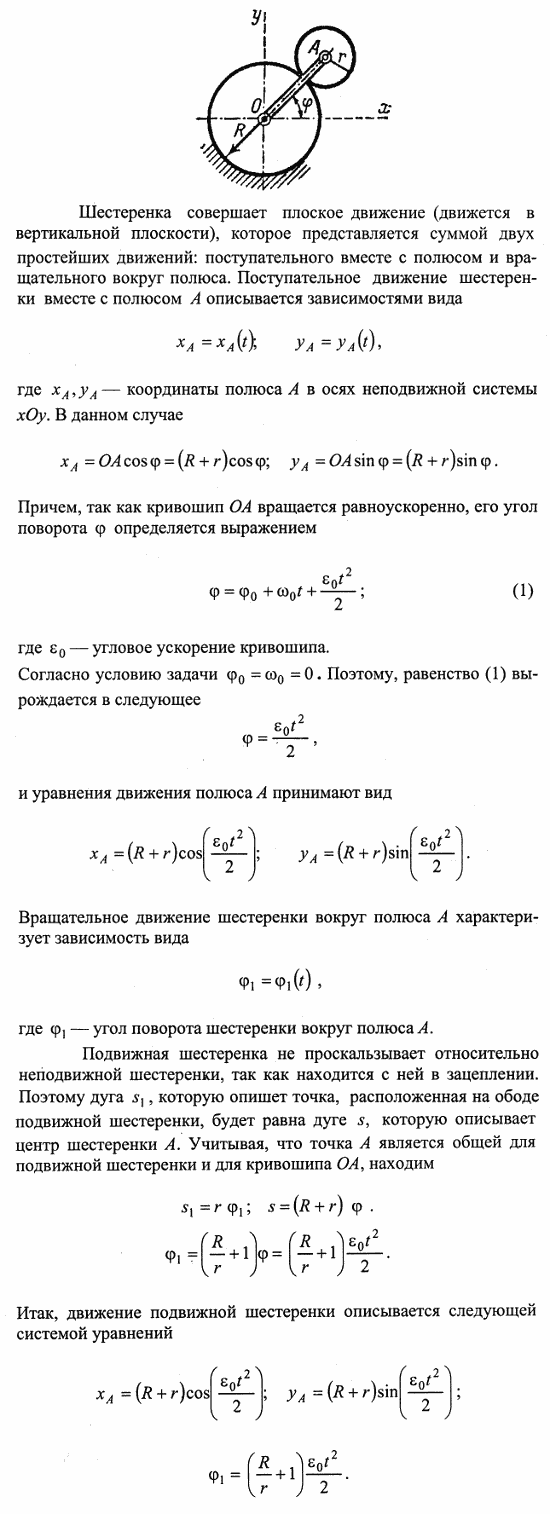
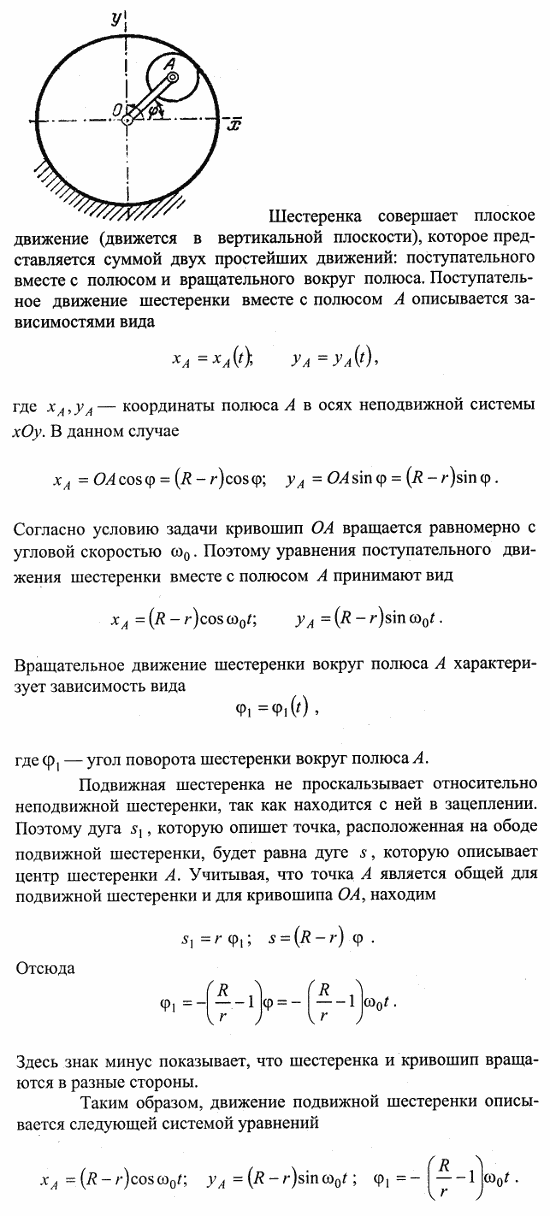
15.3 Шестеренка радиуса r, катящаяся по неподвижной шестеренке радиуса R, приводится в движение кривошипом OA, вращающимся равноускоренно с угловым ускорением ε0 вокруг оси O неподвижной шестеренки. Составить уравнения движения подвижной шестеренки, приняв за полюс ее центр A, если при t=0 угловая скорость кривошипа ω0=0 и начальный угол поворота φ0=0.
15.4 Шестеренка радиуса r, катящаяся внутри неподвижной шестеренки радиуса R, приводится в движение кривошипом OA, вращающимся равномерно вокруг оси O неподвижной шестеренки с угловой скоростью ω0. При t=0 угол φ0=0. Составить уравнения движения подвижной шестеренки, приняв ее центр A за полюс.
15.5 Найти уравнения движения шатуна, если кривошип вращается равномерно; за полюс взять точку A на оси пальца кривошипа; r — длина кривошипа, l — длина шатуна, ω0 — угловая скорость кривошипа. При t=0 угол α=0.
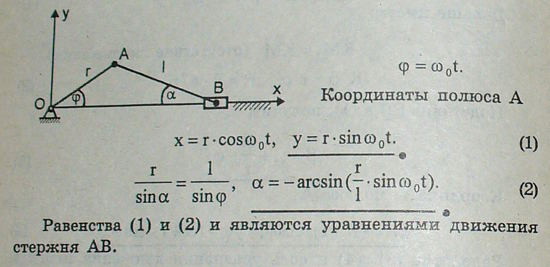
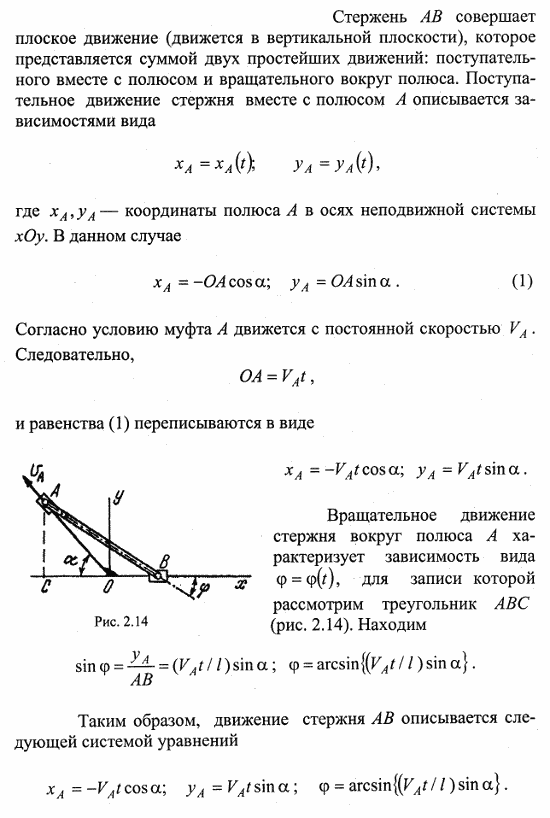
15.6 Муфты A и B, скользящие вдоль прямолинейных направляющих, соединены стержнем AB длины l. Муфта A движется с постоянной скоростью vA. Написать уравнения движения стержня AB, предполагая, что муфта A начала двигаться от точки O. За полюс принять точку A. Угол BOA равен π-α.
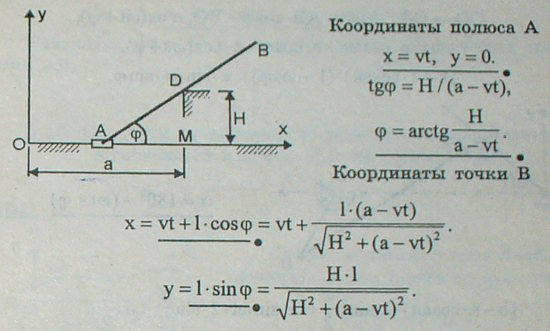
15.7 Конец A стержня AB скользит по прямолинейной направляющей с постоянной скоростью v, причем стержень при движении опирается на штифт D. Написать уравнения движения стержня и его конца B. Длина стержня равна l, превышение штифта D над прямолинейной направляющей равно H. В начале движения конец стержня A совпадал с точкой O — началом неподвижной системы координат; OM=a. За полюс принять точку A.
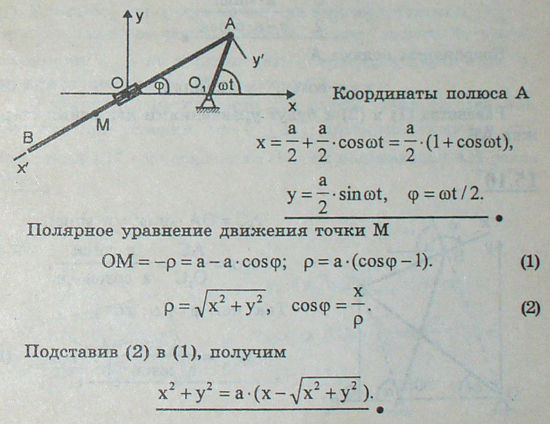
15.8 Кривошип O1A длины a/2 вращается с постоянной угловой скоростью ω. С кривошипом в точке A шарнирно соединен стержень AB, проходящий все время через качающуюся муфту O, причем OO1=a/2. Найти уравнения движения стержня AB и траекторию (в полярных и декартовых координатах) точки M, находящейся на стержне на расстоянии a от шарнира A. За полюс принять точку A.
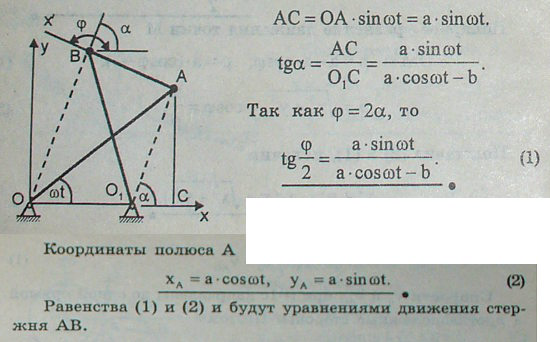
15.9 Кривошип OA антипараллелограмма OABO1, поставленного на большое звено OO1, равномерно вращается с угловой скоростью ω. Приняв за полюс точку A, составить уравнения движения звена AB, если OA=O1B=a и OO1=AB=b (a<b); в начальный момент кривошип OA был направлен по OO1.

15.10 Кривошип OA антипараллелограмма OABO1, поставленного на малое звено OO1, равномерно вращается с угловой скоростью ω. Приняв за полюс точку A, составить уравнения движения звена AB, если OA=O1B=a и OO1=AB=b (a>b); в начальный момент кривошип OA был направлен по OO1.