

Лекція 5. Схеми та алгоритми роботи мпск двигуном автомобіля
4.1. Електронні керуючі комплекси двигунів
Одним з найважливіших напрямів розвитку автомобільних систем керування є збільшення комплексності систем. При цьому спостерігаються дві тенденції:
1. Інтеграція МПСК двигуна в загальну мережу бортових мікроконтролерів автомобіля керуючих трансмісією, системами захисту і безпеки, навігації, круїз-контролю тощо. Завершується така мережа центральним бортовим комп'ютером. Такий комп'ютер призначений не тільки для загального контролю роботи окремих елементів мережі але, головним чином, для зовнішнього інформаційного обслуговування водія і пасажирів, включаючи використання сучасних комунікаційних систем для зв'язку з будинком, банком і офісом, можливість виходу в інтернет, використання мультимедіа тощо;
2. Створення зовнішніх комплексів для керування двигунами в процесі відладки і експлуатації. Такі комплекси, в першу чергу, створюються стосовно двигунів спеціальних автомобілів фірмами виробниками і в крупних експлуатуючих фірмах.
Мікропроцесорне керування кожним окремим двигуном здійснюється декількома керуючими системами різного рівня і різного функціонального призначення, що утворюють зв'язаний комплекс. Схема такого електронного керуючого комплексу, стосовно автомобільних двигунів, представлена на рис. 4.1.
Неодмінним елементом електронного керуючого комплексу є бортовий мікроконтролер (БМК), зв'язаний з двигуном, який спільно з ним експлуатується і часто встановлений безпосередньо на ньому. Можливе виконання БМК безпосередньо у складі центрального мікроконтролера автомобіля.
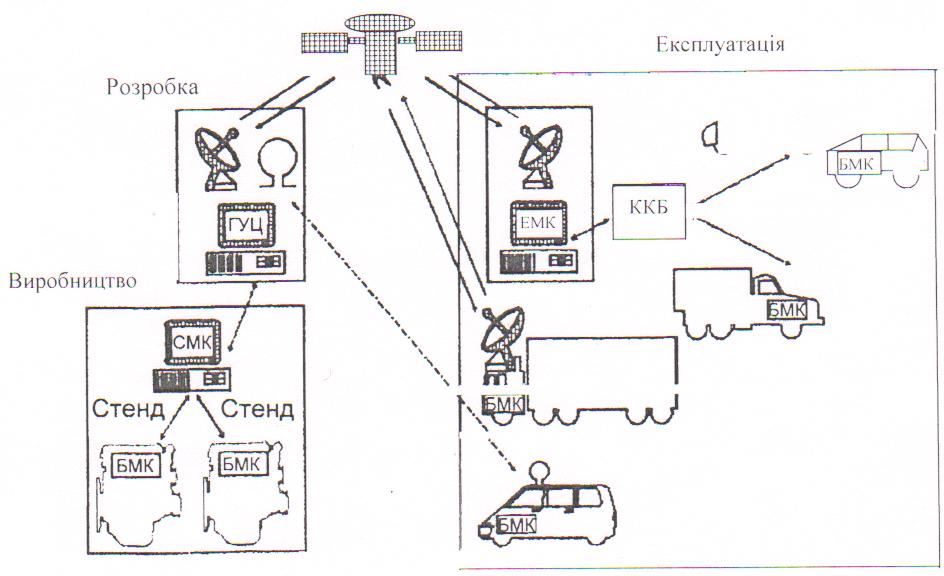
Рис. 4.1. Схема електронного керуючого комплексу автомобільних двигунів
ГУЦ - головний стаціонарний центр керування розробника; СМК - стаціонарний стендовий налагоджувальний мікроконтролер; БМК - бортовий мікроконтролер; ККБ – контрольно-коректуючий блок; ЕМК - мікроконтролер експлуатуючого підприємства
Врешті, всі системи електронного керуючого комплексу взаємодіють з двигуном саме через БМК. Апаратне забезпечення (набір модулів) БМК збирають паралельно з виготовленням і зборкою двигуна. Двигун поступає на заводський стенд разом із своїм персональним БМК. Спочатку БМК одержує початкові версії алгоритмів керування (математичного забезпечення), що забезпечують пуск і спільну відладку двигуна і БМК на стенді.
Після закінчення відладки БМК одержує свою індивідуальну версію математичного забезпечення для експлуатації в комплекті з своїм двигуном. Перестановка надалі БМК з одного двигуна на іншій без корекції математичного забезпечення недопустима.
БМК виконує всі алгоритми регулювання, має необхідний мінімум програмних, пошукових і аналітичних алгоритмів оптимального адаптивно-робастного керування, уточнює, за наслідками виконаного ним пошуку інформацію, параметри програм. Він звичайно виконує також і діагностування двигуна і своїх вузлів, реалізує алгоритми забезпечення надійності, попереджувальної сигналізації і аварійного захисту двигуна, накопичує діагностичну і робочу інформацію про виявлені дефекти, проведені ним операції по усуненню або зменшенню їх впливу на якість роботи двигуна.
Крім того, БМК накопичує інформацію про режими роботи двигуна, витрату палива і про всі порушення в експлуатації, допущені обслуговуючим персоналом, у тому числі і водієм, інструкцій і розпоряджень виробників двигуна і автомобіля, а також експлуатуючого підприємства. На деяких автомобілях частина цієї інформації разом з інформацією про роботу інших систем автомобіля поступає і в «чорний ящик», аналогічний вживаному в авіації.
СМК – стаціонарний стендовий налагоджувальний мікроконтролер володіє ширшим спектром пошукових і аналітичних адаптивних алгоритмів. СМК підключається до БМК для регулювання, відладки і здачі двигуна після виготовлення або капітального ремонту, а також введення в БМК початкового, а після відладки і робочих варіантів математичного забезпечення. СМК вводить в БМК, ще на стадії зборки двигуна, всю, одержувану від головного стаціонарного керуючого центру розробника (або виробника) – ГУЦ, початкову інформацію, необхідну для початку його роботи з даним двигуном. СМК виконує разом з БМК повний об'єм пошукової адаптації для забезпечення відладки, випробувань, здачі двигуна і уточнення початкових робочих версій алгоритмів і програм керування БМК двигуна в експлуатації.
Виробник двигунів для виключення або зведення до мінімуму наслідків невмілого користування може вводити для виготівників і експлуатаційників автомобілів кодові заборони на будь-які несанкціоновані ним корективи математичного забезпечення БМК. Наприклад, обмеження подачі палива, що вводяться в робочі програми виробником двигуна і, які враховують умови експлуатації, обумовлені при замовленні двигуна. По деяких обмеженнях, як втім, і по деяких параметрах алгоритмів керування, допускається подальша корекція тільки у бік посилення обмежень.
На заводському стенді вибираються конкретні для даного двигуна параметри математичного забезпечення його БМК, з яким двигун і БМК передається на завод виробник автомобіля.
На цьому власне відладка мікроконтролера двигуна закінчується.
У ГУЦ є узагальнені початкові варіанти математичного забезпечення БМК для кожного типорозмеру двигуна. ГУЦ розробляє, перш за все, початкову стендову версію математичного забезпечення. Він враховує призначення, умови роботи, експлуатаційні і сертифікаційні дані вибраної замовником модифікації двигуна, задані функції керування і необхідні параметри математичного забезпечення БМК. Через СМК ці дані вводяться як початкові в БМК.
ГУЦ через різні системи зв'язку періодично підключається до БМК безпосередньо або через проміжні керуючі структурні ланки не тільки під час відладки і здачі двигуна, але і при його експлуатації.
Друге коло функцій ГУЦ починається з накопичення в своєму запам’ятовуючому пристрої (у файлах, відмічених серійними номерами двигуна і БМК) остаточних робочих версій математичного забезпечення, відпрацьованих СМК, а також відомості про історію створення двигуна, інформацію про початкові його характеристики. Запам'ятовується інформація про математичне забезпечення кожного зразка БМК двигуна, що зійшов із заводського стенду.
Згодом ГУЦ зіставляє її з інформацією, зібраною БМК безпосередньо при експлуатації і що періодично поступає в нього для визначення і внесення необхідних змін в математичне забезпечення.
Крім того, результати експлуатації конкретних зразків двигунів аналізуються, узагальнюються і зіставляються з новими розробками. ГУЦ вносить корективи в робочі алгоритми і програми адаптивного керування, як кожного конкретного, так і всіх інших експлуатованих однотипних двигунів, а також і в початкові версії програмного забезпечення БМК двигунів, що знов виготовляються і проектованих.
Зміни програмного забезпечення двигунів, що випускаються, так і експлуатованих, необхідні для реалізації нових функцій, характеристик і версій керування БМК. Це найраціональніше без зміни апаратної частини БМК.
У електронному керуючому комплексі є і проміжні керуючі структурні ланки, не показані на рис. 4.1, які представляють в першу чергу керуючі центри виробників автомобілів. Виробник автомобіля може внести, в межах дозволеного, власні додаткові корективи в математичне забезпечення БМК, що враховують специфіку роботи двигуна на даному типі автомобіля. Найчастіше вводять обмеження частоти обертання двигуна по допустимій швидкості автомобіля, відповідно до особливостей конкретного місця експлуатації. При цьому можуть бути використані і загальні рекомендації, і математичне забезпечення виробників двигунів. Така індивідуальна корекція обмеження частоти обертання двигуна в БМК забезпечує виробникам автомобілів і експлуатуючим організаціям без додаткових витрат здійснення оптимального обмеження швидкості руху по дорогах для підвищення безпеки і надійності.
Численнішу групу проміжних ланок електронного керуючого комплексу складають мікроконтролери периферійних регіональних сервісних або експлуатуючих підприємств і транспортних компаній – ЕМК. Останні накопичують в своєму запам'ятовуючому пристрої (у файлах, відмічених серійними номерами двигуна і БМК) інформацію, одержану безпосередньо від БМК через різні системи зв'язку або через переносний контрольно-коректуючий блок ККБ, що періодично підключається.
ЕМК узагальнює і передає в ГУЦ інформацію про результати експлуатації двигунів, проводить, при необхідності, власний їх аналіз, визначає доцільність додаткової корекції, що враховує особливості експлуатації, наприклад, обмеження частоти обертання і подачі палива, які забезпечують збільшення терміну служби, продуктивності, зниження шкідливих викидів або витрати палива. Ця корекція здійснюється звичайно через ККБ.
ККБ використовує для періодичної перевірки і коректування математичного забезпечення, накопичену в БМК в процесі експлуатації двигуна наступну діагностичну інформацію: дійсні характеристики і параметри двигуна, режими роботи, порушення допущені персоналом, відмови, що мали місце і процедури, проведені БМК, тобто інформацію по змінах математичного забезпечення, які були виконані БМК автоматично.
ККБ виконує при необхідності повнішу діагностику БМК і двигуна, додаткові до набору БМК алгоритми пошукової адаптації для корекції математичного забезпечення локальних систем і програмної адаптації. ККБ звичайно застосовується для обслуговування групи спільно експлуатованих двигунів.
ККБ найчастіше виконують у вигляді комп'ютера-ноутбука. Але останнім часом з'явилися безконтактні зчитуючі пристрої, що забезпечують автоматичне підключення БМК до ЕМК або ГУЦ при проїзді автомобіля поблизу такого зчитуючого пристрою. Ці пристрої можуть бути встановлені в будь-яких точках дорожньої мережі, наприклад, на території транспортного підприємства, або на магістралях, по яких можливий проїзд контрольованих автомобілів. Такі безконтактні зчитуючі пристрої знімають інформацію, накопичену БМК, і передають в нього інформацію, підготовлену ГУЦ саме для цього автомобіля. Очевидно, що інформація про необхідні дії по обслуговуванню передається не тільки водію на відеоконтрольний пристрій автомобіля, але і на ЕМК або власнику автомобіля.
Для обміну інформацією між БМК, ЕМК і ГУЦ звичайно використовують телекомунікаційні системи, наприклад, супутникового космічного зв'язку. По них передається в ГУЦ інформація про стан кожного з обслуговуваних двигунів, а з нього – необхідні індивідуальні корективи математичного забезпечення БМК конкретних двигунів.
Як правило, керуючі комплекси двигунів входять в керуючі комплекси автомобілів. При цьому як ГУЦ може виступати і сервіс-центр виробника автомобілів.
На важких вантажівках і міжміських автобусах, що випускаються багатьма фірмами, застосовують саме такі об'єднані системи комунікації і контролю, звані Fleet Board, Fleet management або Dynafleet. Зв'язок автомобіля безпосередньо з сервіс центром здійснюється через Інтернет. Система Fleet Board фірми Mersedes-Benz містить як елементи стільниковий зв'язок стандарту GSM з передачею текстових повідомлень SMS, навігаційну систему GPS і «чорний ящик».
Поява навіть на легкових автомобілях супутникових навігаційних і охоронних систем, стільникових телефонів і інших видів зв'язку дозволяє організувати безпосереднє підключення БМК до ЕМК або навіть ГУЦ. При цьому вся інтелектуальна частина обслуговування: аналіз накопиченої інформації, необхідне або бажане перепрограмування БМК і вироблення рекомендацій користувачу двигуна, про доцільний перелік технічного обслуговування виробляється ЕМК або ГУЦ і реалізується через БМК з висновком інформації водію на загальний дисплей автомобіля.
В результаті застосування електронних керуючих комплексів експлуатація двигунів з одного боку стала простішою, а з іншого – вся система експлуатації стала вищої якості і досконалішою, що досягається інтелектом цифрового керування ГУЦ.
Це, безумовно, спрощує, розширює і прискорює повсюдне використовування електронних керуючих комплексів двигунів в якнайповнішому і ефективнішому вигляді.
Дещо спрощений варіант подібного електронного керуючого комплексу двигунів кар'єрних автосамоскидів великої і особливо великої вантажопідйомності більше 10 років діє в компанії Detroit Diesel. За оцінкою компанії його використовування виявилося ефективним при роботі з достатньо крупними експлуатуючими підприємствами, що мають спеціально підготовлений кваліфікований персонал, комунікаційні системи, а в кращому разі і засоби попередньої обробки ЕМК інформації з ККБ. Керуючі комплекси створили і успішно застосовують фірми Volvo, Cammins, Scania тощо.
Для дрібних і тим більше індивідуальних користувачів автомобілів включення в електронний керуючий комплекс створює серйозні кваліфікаційні і психологічні труднощі.
Головною перешкодою радикального рішення цієї проблеми є непідготовленість експлуатаційників і власників автомобілів. Їх перенавчання і перевиховання стало одним з найважливіших напрямів діяльності двигуновиробних фірм.
В той же час у складі керуючих комплексів ступінь автоматизації адаптивних БМК двигунів стає таким високим, що дозволить водію, у тому числі і непрофесійному, експлуатувати будь-який автомобіль без спеціальної підготовки.
Можна чекати, що провідні автомобілевиробні фірми з метою підвищення якості і надійності автомобілів створять в найближчому майбутньому електронні керуючі комплекси і для легкових автомобілів.