

Листинг_№9
%На примере решения некорректного уравнения Фредгольма
%первого рода (54) с помощью метода регуляризации,
%т.е. путем сведения исходной задачи (54), (57) к
%решению корректного интегро-дифференциального уравнения
%(58), (58') исследуется зависимость оптимального
%значения параметра alpha_opt от шага сетки h
function noncor3
global N h
%Вводим начальное число узлов сетки по
%переменным xi и eta
N=21;
%Организуем цикл расчетов с разным сетками
for t=1:5
%Число узлов сетки по переменным xi и eta
%увеличиваем в арифметической прогрессии
N=N+30; h=1.0/(N-1); h2=h^2; h3=h^3;
xi=0:h:1; eta=0:h:1;
%Определяем значения аналитического решения cos(pi*xi)
%в узлах сетки xi
ya=cos(pi*xi);
%Определяем набор параметров регуляризации alpha
alph_l=7e-6; alph_r=2e-5; alph_h=(alph_r-alph_l)/20;
alpha=alph_l:alph_h:alph_r;
%Организуем цикл расчетов с различными значениями
%параметра регуляризации
for s=1:length(alpha)
%Согласно разностной схеме (59), (61), (61')
%определяем линейную систему уравнений Ay = b
%относительно неизвестного вектора y
%Определяем левое граничное условие согласно (61)
A(1,1)=0.25*h3*Q(xi(1),eta(1));
A(1,N)=0.25*h3*Q(xi(1),eta(N));
for j=2:(N-1)
A(1,j)=0.5*h3*Q(xi(1),eta(j));
end
A(1,1)=A(1,1)+alpha(s)*(1+0.5*h2);
A(1,2)=A(1,2)-alpha(s);
b(1)=0.5*h2*f(xi(1));
%Определяем элементы матрицы A согласно (59)
for i=2:(N-1)
A(i,1)=0.5*h3*Q(xi(i),eta(1));
A(i,N)=0.5*h3*Q(xi(i),eta(N));
for j=2:(N-1)
A(i,j)=h3*Q(xi(i),eta(j));
end
A(i,i)=A(i,i)+alpha(s)*(2+h2);
A(i,i-1)=A(i,i-1)-alpha(s);
A(i,i+1)=A(i,i+1)-alpha(s);
b(i)=h2*f(xi(i));
end
%Определяем правое граничное условие (61')
A(N,1)=0.25*h3*Q(xi(N),eta(1));
A(N,N)=0.25*h3*Q(xi(N),eta(N));
for j=2:(N-1)
A(N,j)=0.5*h3*Q(xi(N),eta(j));
end
A(N,N)=A(N,N)+alpha(s)*(1+0.5*h2);
A(N,N-1)=A(N,N-1)-alpha(s);
b(N)=0.5*h2*f(xi(N));
%Решаем линейную систему уравнений Ay = b
y=A\b';
%Оцениваем ошибку численного решения y путем
%оценки разности error=||y-ya|| в норме C, где
%ya - аналитическое решение задачи (54), (57)
for i=1:N
z(i)=abs(y(i)-ya(i));
end
error(s)=max(z);
end
%Определяем значение alph_opt, при котором ошибка
%численного решения минимальна
ermin=min(error);
for s=1:length(alpha)
if ermin==error(s)
alph_opt(t)=alpha(s);
end
end
step(t)=h;
%Рисуем график зависимости ошибки численного
%решения от параметра alpha
subplot(1,2,1);
semilogx(alpha,error,'LineWidth',0.75*t);
hold on
end
%Рисуем график зависимости оптимального значения
%параметра регуляризации alph_opt от шага сетки
subplot(1,2,2); plot(step,alph_opt);
%Определяем функцию Q(xi,eta), заданную в (58')
function y=Q(xi,eta)
if (xi==0)&(eta==0)
y=1;
else
y=(exp(xi+eta)-1)/(xi+eta);
end
%Определяем функцию f(xi), заданную в (58')
function y=f(xi)
global N h
%Используем формулу трапеции для аппроксимации
%интеграла, входящего в определение f(xi) в (58')
y=0.5*h*(fi(0,xi)+fi(1,xi));
for i=2:(N-1)
y=y+h*fi(h*(i-1),xi);
end
function y=fi(x,xi)
y=-exp(x*xi)*((x*(exp(x)+1))/(x^2+pi^2));
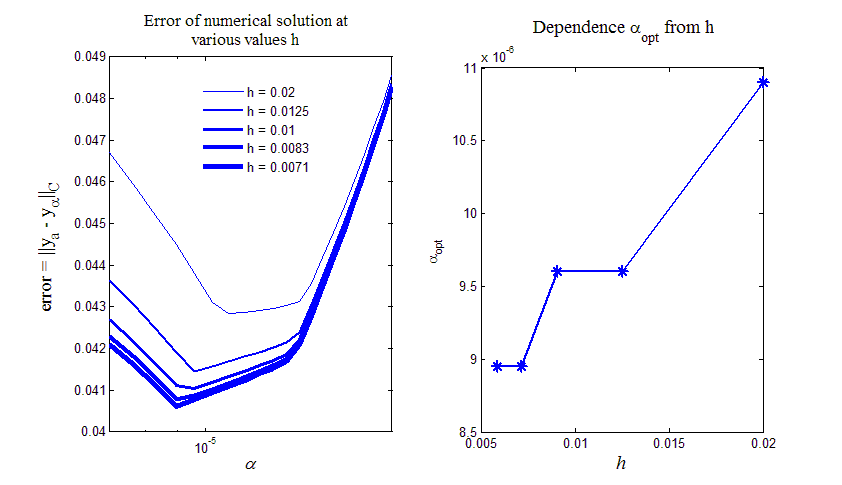
Рис.9. Изучение зависимости оптимального значения параметра регуляризации opt от шага сетки h
На рис.9 приведен итог работы кода программы листинга_№9. На левом рисунке приведены пять графиков зависимости ошибки численного решения от параметра регуляризации при различных значениях шага сетки h. На всех пяти графиках отчетливо видно наличие оптимального значения параметра регуляризации opt, при котором ошибка численного решения error = (ya = cos() — аналитическое решение исходной задачи (54), (57)) достигает минимального значения. На правом рисунке показана зависимость оптимального значения параметра регуляризации от шага сетки. Правый рисунок демонстрирует тенденцию стремления opt к нулю при h 0, что иллюстрирует сходимость регуляризированного решения y к аналитическому решению ya исходной задачи.
Некоторые приложения метода регуляризации. Некорректно поставленные задачи встречаются в практике довольно часто. Это, например, сглаживание и дифференцирование экспериментально измеренных функций, суммирование рядов Фурье с неточно заданными коэффициентами, решение линейных плохо обусловленных систем уравнений, решение задач оптимального управления, аналитическое продолжение функций, обратные задачи теплопроводности и геологической разведки, восстановление переданного сигнала и многие другие задачи.
Сглаживание
функции.
Пусть функция f(x),
x
[a,b]
измерена экспериментально и содержит
заметную случайную ошибку. В терминах
задачи (39) задача сглаживания функции
f(x)
состоит в решении некорректного уравнения
![]() ,
где
,
где
![]() .
Применим метод регуляризации к данной
задаче, ограничившись случаем n
= 1, т.е. сильной регуляризацией. Тогда,
принимая во внимание формулы (51) —
(51),
получим следующее уравнение Эйлера:
.
Применим метод регуляризации к данной
задаче, ограничившись случаем n
= 1, т.е. сильной регуляризацией. Тогда,
принимая во внимание формулы (51) —
(51),
получим следующее уравнение Эйлера:
![]() (62)
(62)
Согласно (62), сглаженная функция u(x) удовлетворяет линейному дифференциальному уравнению второго порядка, для которого поставлена вторая краевая задача.
Для решения уравнения (62) введем сетку по переменной x: xi = a + (i 1)h, i = 1,…,N, h = (b a)/(N 1) и составим разностную схему:
![]() , (63)
, (63)
где
yi
u(xi),
![]() ,
i
= 2,…,N
1. Недостающая
пара уравнений вытекает из аппроксимации
граничных условий со вторым порядком
точности по шагу сетки:
,
i
= 2,…,N
1. Недостающая
пара уравнений вытекает из аппроксимации
граничных условий со вторым порядком
точности по шагу сетки:
![]() . (64)
. (64)
Находя значения в точках x = a и x = b из уравнения (62) и подставляя их в (64), получим следующие разностные уравнения для граничных условий:
![]() , (65)
, (65)
![]() . (65)
. (65)
На листинге_№10 приведен код программы сглаживания функции f(x) с помощью метода сильной регуляризации, который сводится к решению обыкновенного дифференциального уравнения второго порядка (62) согласно разностной схеме (63), (65), (65).