

Листинг_№2
%Программа построения трехмерного профиля
%множителя роста гармоник при переходе со
%слоя на слой в продольно-поперечной схеме и
%графика зависимости сомножителя gamma от q
clear all
a=1; b=1;%габариты прямоугольной области
N=100; M=100;%число узлов сетки по x1 и x2
h1=a/N; h2=b/M;%шаги равномерной сетки по x1 и x2
%Оптимальное значение шага по времени
tau=(a*b)/(pi*sqrt(N*M));
%Цикл построения трехмерного профиля множителя
%роста гармоник
for q=1:(N-1)
alpha=((2*tau)/h1^2)*sin((pi*q*h1)/(2*a))^2;
for r=1:(M-1)
beta=((2*tau)/h2^2)*sin((pi*r*h2)/(2*b))^2;
ro(q,r)=((1-alpha)*(1-beta))/...
((1+alpha)*(1+beta));
end
end
%Рисуем трехмерный профиль множителя роста
n1=1:(N-1); n2=1:(M-1);
subplot(1,2,1); surf(n2,n1,ro);
%Определяем зависимость gamma от q
for q=1:(N-1)
alpha=((2*tau)/h1^2)*sin((pi*q*h1)/(2*a))^2;
gamma(q)=(1-alpha)/(1+alpha);
end
%Рисуем график зависимости gamma от q
subplot(1,2,2); plot(n1,gamma);
Оценку величины
оптимального шага в (23) следует
рассматривать как довольно грубую.
Например, в книге1
величина оптимального шага оценивалась,
исходя из уравнения
![]() ,
согласно которому
,
согласно которому
![]() . (23)
. (23)
Оценки величины оптимального шага (23), (23) протестируем на примере решения двумерного эволюционного уравнения (16) с помощью продольно-поперечной разностной схемы. На листинге_№3 приведен соответствующий программный код.
Листинг_№3
%Программа численного определения величины
%оптимального шага по времени в процессе
%решения двухмерного уравнения теплопроводности
%(11) с помощью продольно-поперечной схемы
function optimum
global a b vc0 r0 r1
%Определяем габариты области интегрирования
%по времени, направлениям x1 и x2, а также
%константу vc0, задающую амплитуду
%начального распределения
a=1; b=1; vc0=100;
r0=0.2*min(a,b); r1=0.4*min(a,b);
%Задаем точность расчета на установление eps
eps=1e-8;
%Определяем число шагов по направлениям x1 и x2
N=41; M=41; h1=a/(N-1); h2=b/(M-1);
%Определяем сетки по x1 и x2
x1=0:h1:a; x2=0:h2:b;
%Оцеваем оптимальный шаг по формуле (23)
tau0=(a*b)/(pi*sqrt(N*M));
%Оцениваем оптимальный шаг по формуле (23')
tau1=(1/pi)*(a^2/N^2+b^2/M^2)^0.5*(1/a^2+1/b^2)^(-0.5);
%Выводим численные оценки величины оптимального шага
[tau0 tau1]
%Формируем массив шагов по времени
tau=(tau0/10):(tau0/10):(4*tau0);
k=0;
%Формируем цикл расчетов с различными шагами по времени
for tu=1:length(tau)
%Определяем начальные данные в виде кольца
for n=1:N
for m=1:M
y1(n,m)=v0(x1(n),x2(m));
end
end
%Организуем основной цикл интегрирования по времени
nrm=max(max(abs(y1)));
step(tu)=0;
%Формируем цикл по времени решения уравнения (16)
%на установление, т.е. до тех пор, пока не будет
%достигнута нужная точность eps
while (nrm>eps)&(step(tu)<300)
p1=(0.5*tau(tu))/h1^2;
p2=(0.5*tau(tu))/h2^2;
%Находим решение на полуцелом временном слое,
%т.е. решаем уравнение (11.39)
for m=2:(M-1)
%Учитываем нулевое граничное при x1=0
alpha(2)=0; beta(2)=0;
for n=2:(N-1)
alpha(n+1)=p1/(1+p1*(2-alpha(n)));
beta(n+1)=(y1(n,m)+p2*(y1(n,m-1)-...
2*y1(n,m)+y1(n,m+1))+p1*beta(n))/...
(1+p1*(2-alpha(n)));
end
%Учитываем нулевое граничное при x1=a
ys(N,m)=0;
for n=N:-1:2
ys(n-1,m)=alpha(n)*ys(n,m)+beta(n);
end
end
%Находим решение на следующем временном слое,
%т.е. решаем уравнение (11.39')
for n=2:(N-1)
%Учитываем нулевое граничное при x2=0
alpha(2)=0; beta(2)=0;
for m=2:(M-1)
alpha(m+1)=p2/(1+p2*(2-alpha(m)));
beta(m+1)=(ys(n,m)+p1*(ys(n-1,m)-...
2*ys(n,m)+ys(n+1,m))+p2*beta(m))/...
(1+p2*(2-alpha(m)));
end
%Учитываем нулевое граничное при x2=b
y2(n,M)=0;
for m=M:-1:2
y2(n,m-1)=alpha(m)*y2(n,m)+beta(m);
end
end
for m=1:M
y2(1,m)=0; y2(N,m)=0;
end
%Находим норму решения эволюционной задачи в L2
s=0;
for n=1:N
for m=1:M
s=s+h1*h2*y2(n,m)^2;
end
end
nrm=sqrt(s);
y1=y2;
step(tu)=step(tu)+1;
end
end
%Рисуем график зависимости числа шагов в задаче на
%установление с заданной точностью eps от шага
%интегрирования по времени
plot(tau,step);
%Определяем функцию начального распределения
function y=v0(x1,x2)
global a b vc0 r0 r1
r=sqrt((x1-0.5*a)^2+(x2-0.5*b)^2);
y=0;
if (r>=r0)&(r<=r1)
y=vc0*(r1-r)*(r-r0);
end
Работа программы листинга_№3 генерирует вывод двух чисел в командное окно MATLAB и графика, примерный вид которого приведен на рис.3. Пара чисел соответствует оценкам оптимального шага по двум формулам (23) и (23). Эти оценки довольно близки, отличия проявляются, когда N и M заметно отличаются. На рис.3 виден отчетливый минимум при выборе величины шага интегрирования по времени с помощью продольно-поперечной схемы. При данном конкретном значении параметров теоретические оценки оптимального шага по формулам (23) и (23) довольно близки к истинному значению, полученному из графика рис.3.
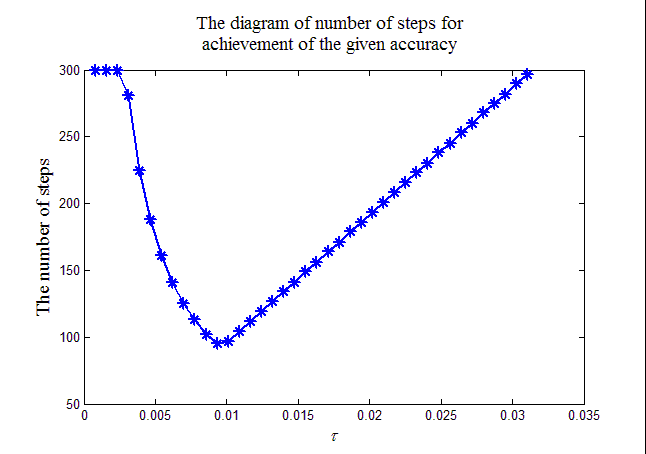
Рис.3. График зависимости числа шагов в продольно-поперечной схеме для достижения заданной точности от шага сетки по времени
Минимальное число
шагов K
необходимое для достижения заданной
точности
определяется из условия
![]() .
Для оценки числа K
выберем в качестве шага по времени —
оптимальный шаг (23), а также предположим,
что a
= b
и N
= M,
тогда нетрудно подсчитать согласно
(20) — (21),
что
.
Для оценки числа K
выберем в качестве шага по времени —
оптимальный шаг (23), а также предположим,
что a
= b
и N
= M,
тогда нетрудно подсчитать согласно
(20) — (21),
что
![]()
![]()
![]()
![]()
![]() ,
т.е.
,
т.е.
![]() или
или
![]() ,
,
где T — время счета на установление (14). Таким образом, минимально необходимое число шагов по времени для достижения заданной точности реализуемое при оптимальном шаге (23) пропорционально числу узлов сетки по пространству.
Локально-одномерная схема (11.48), (11.49) с полусуммой по времени в двумерном случае допускает аналогичные выводы о наличии оптимального шага по времени для достижения заданной точности в счете на установление.
Действительно, представим локально-одномерную схему в виде:
![]() , (24)
, (24)
![]() , (24)
, (24)
где операторы 1,
2
определены в (17)
и коммутируют друг с другом. Умножим
уравнение (24) слева на E
+ ½
2,
а уравнение (24)
— на E
— ½
1,
тогда, после исключения
![]() ,
найдем
,
найдем

Последнее уравнение может быть преобразовано к канонической форме (17), т.е.
![]() , (25)
, (25)
где операторы A и B определены в (17). Поскольку левая часть локально-одномерной схемы (25) совпадает с левой частью продольно-поперечной схемы (17), постольку минимальное количество шагов для достижения заданной точности в схеме на установление реализуется при некотором оптимальном шаге 0, оценка которого приведена в формулах (23), (23).
В общем случае, когда размерность два и более, область по пространству сложно устроена и пр., заранее неизвестно, какое число шагов необходимо совершить до установления. Поэтому на практике используют тот или иной нестрогий критерий установления. Без обсуждения приведем следующие три критерия сходимости:
![]() ,
,
![]() ,
,
![]() .
.
Чебышевский набор шагов. Счет на установление может быть проведен с переменным шагом по времени. В задачах, в которых границы спектра разностных операторов известны, построены специальные наборы шагов k, k = 1,…K, обеспечивающие более быстрое затухание начальных данных, чем в случае расчетов с одним-единственным оптимальным шагом.
Пусть разностная схема может быть приведена к канонической двухслойной форме:
![]() , (26)
, (26)
где, как обычно считается, что A и B — самосопряженные положительно определенные операторы, удовлетворяющие неравенствам
![]() . (27)
. (27)
Затухание начальных данных определяется однородным уравнением (26) при = 0. Обозначая решение однородного уравнения (26) символом z(k), k = 1,…,K, перепишем его в форме
![]() , (28)
, (28)
где
![]() . (28)
. (28)
Согласно (28), имеем
![]() . (29)
. (29)
Из (29) видно, что
для наиболее быстрого затухания начальных
данных последовательность шагов k,
k
= 1,…K
надо подобрать так, чтобы
![]() была минимальна при заданном числе
шагов K.
была минимальна при заданном числе
шагов K.
Поскольку A и B — самосопряженные операторы, оператор C также самосопряженный, причем согласно (27) следует следующая оценка:
![]() . (30)
. (30)
С учетом (30) норму
операторного многочлена
![]() можно оценить по формуле
можно оценить по формуле
![]() ,
,
где
![]() — алгебраический многочлен. Известно,
что многочлен, минимально уклоняющийся
на отрезке
— алгебраический многочлен. Известно,
что многочлен, минимально уклоняющийся
на отрезке
![]() от нуля, является многочленом Чебышева2.
Учитывая это обстоятельство, можно
использовать следующий чебышевский
набор шагов:
от нуля, является многочленом Чебышева2.
Учитывая это обстоятельство, можно
использовать следующий чебышевский
набор шагов:
![]() . (31)
. (31)
Считая многочлен многочленом Чебышева, можно оценить его максимальное отклонение от нуля согласно формуле:
![]() . (32)
. (32)
Отбросим
![]() в (32), считая что это слагаемое много
меньше единицы, тогда число шагов K
в схеме счета на установление (26) с
чебышевским набором шагов по времени
для достижения заданной точности ,
можно представить в виде следующей
формулы:
в (32), считая что это слагаемое много
меньше единицы, тогда число шагов K
в схеме счета на установление (26) с
чебышевским набором шагов по времени
для достижения заданной точности ,
можно представить в виде следующей
формулы:
![]() (33)
(33)
Проиллюстрируем использование чебышевского набора шагов по времени на примере счета на установление с помощью явной разностной схемы вида
![]() . (34)
. (34)
Схема (34) записана
в канонической форме (26), поскольку B
= E
и A
=
(1
+ 2).
Найдем 1,
2,
которые, согласно (27), определяют пределы
изменчивости оператора A,
т.е.
![]() .
Для этого достаточно найти минимальное
и максимальное собственные значения
оператора A
=
(1
+ 2).
Задача на собственные значения оператора
A
решена в учебнике3,
где приведено следующее выражение для
собственных значений
.
Для этого достаточно найти минимальное
и максимальное собственные значения
оператора A
=
(1
+ 2).
Задача на собственные значения оператора
A
решена в учебнике3,
где приведено следующее выражение для
собственных значений
![]() . (35)
. (35)
Учитывая, что q = 1,…,N1 r = 1,…,M1 в (35), найдем
![]() . (36)
. (36)
Учитывая, что
![]() и
и
![]() ,
оценим по порядку величины число K
в расчете на установление с чебышевским
набором шагов. Для этого положим, что a
= b,
N
= M
>>1, тогда
,
оценим по порядку величины число K
в расчете на установление с чебышевским
набором шагов. Для этого положим, что a
= b,
N
= M
>>1, тогда
![]() ,
,
![]() ,
,
![]() .
Подставляя значение
в (33), находим искомое число шагов для
достижения заданной точности :
.
Подставляя значение
в (33), находим искомое число шагов для
достижения заданной точности :
![]() . (37)
. (37)
Оценка (37) говорит о том, что данная процедура эквивалентна экономичным схемам с постоянным оптимальным шагом.
Явная схема (34)
устойчива только при условии, что
![]() .
Среди чебышевского набора шагов (31) есть
как большие
.
Среди чебышевского набора шагов (31) есть
как большие
![]() ,
так и меньшие
.
Большие шаги вызывают рост погрешности,
меньшие — ее затухание. В целом же после
K
шагов ошибка уменьшится в
,
так и меньшие
.
Большие шаги вызывают рост погрешности,
меньшие — ее затухание. В целом же после
K
шагов ошибка уменьшится в
![]() .
Ошибки на промежуточных шагах могут
возрасти настолько сильно, что превысят
пределы памяти, отводимые для чисел с
плавающей запятой (в MATLAB
под тип double
отводится 64 бит или 8 байт) и расчет не
удастся довести до конца. Для преодоления
этой трудности необходимо выбирать
шаги Чебышева в таком порядке, чтобы
отдельный локальный рост в начальных
данных был скомпенсирован соответствующим
затуханием при последующих шагах. На
листинге_№4 приведена небольшая
программа, которая изображает
последовательность чебышевских шагов
(31) для разностной схемы (34) при некотором
выборе параметров.
.
Ошибки на промежуточных шагах могут
возрасти настолько сильно, что превысят
пределы памяти, отводимые для чисел с
плавающей запятой (в MATLAB
под тип double
отводится 64 бит или 8 байт) и расчет не
удастся довести до конца. Для преодоления
этой трудности необходимо выбирать
шаги Чебышева в таком порядке, чтобы
отдельный локальный рост в начальных
данных был скомпенсирован соответствующим
затуханием при последующих шагах. На
листинге_№4 приведена небольшая
программа, которая изображает
последовательность чебышевских шагов
(31) для разностной схемы (34) при некотором
выборе параметров.