

Двигатели постоянного тока.
Двигатели постоянного тока преобразуют электрическую энергию постоянного тока в механическую.
Несмотря на успехи в создании статических полупроводниковых преобразователей и внедрение регулируемых электроприводов переменного тока, производство двигателей постоянного тока увеличивается, и они находят новые области приме нения.
Двигатели постоянного тока благодаря наличию механического преобразователя частоты – коллектора допускают плавное и экономичное регулирование частоты вращения. Это преимущество перед двигателями переменного тока обеспечивает применение двигателей постоянного тока в электроприводах с широким диапазоном изменения частоты вращения. Двигатели постоянного тока находят применение в приводах прокатных станов, станков, на транспорте и в других системах автоматического управления.
По способу возбуждения двигатели постоянного тока, так же как и генераторы, делятся на двигатели независимого, параллельного, последовательного и смешанного возбуждения (см. рис.6). Двигатели независимого возбуждения могут быть разделены на двигатели с электромагнитным возбуждением, когда обмотка возбуждения подключена к постороннему источнику постоянного тока, и на двигатели с магнитоэлектрическим возбуждением, когда вместо обмотки возбуждения используются постоянные магниты.
Основными характеристиками двигателей постоянного тока являются рабочие и механические характеристики. Характеристики холостого хода и короткого замыкания снимаются так же, как и в генераторном режиме.
Рабочие характеристики
двигателя параллельного возбуждения
представлены на рис.7.1, а.
Это – зависимости
![]() ,
,
,
,
![]() ,
и
при постоянном напряжении
сети
,
и
при постоянном напряжении
сети
![]() и неизменном положении
реостата в цепи обмотки возбуждения.
и неизменном положении
реостата в цепи обмотки возбуждения.
С увеличением нагрузки на валу двигателя растет момент на валу двигателя , а частота вращения немного падает. Увеличение нагрузки приводит к росту мощности забираемой из сети, и росту тока якоря . Зависимость КПД от нагрузки имеет такой же вид, как и для других электрических машин.

Рисунок 7.1. – Рабочие характеристики двигателя параллельного возбуждения а и механические характеристики двигателей при различных схемах возбуждения б (1 – параллельное; 2 – последовательное; 3 – смешанное при согласном включении обмоток).
Зависимости
,
,
мало изменяются для двигателей с
различными схемами возбуждения.
Отличаются только характеристики
![]() .
Характеристика
.
Характеристика
![]() при постоянном напряжении сети и
неизменных сопротивлениях регулировочных
реостатов называется механической
характеристикой двигателя и описывается
равнением:
при постоянном напряжении сети и
неизменных сопротивлениях регулировочных
реостатов называется механической
характеристикой двигателя и описывается
равнением:
![]() . (7.1)
. (7.1)
На рис.7.1, б представлены механические характеристики двигателей постоянного тока при различных схемах возбуждения.
Механическая характеристика двигателя параллельного возбуждения – жесткая. Двигатель последовательного возбуждения имеет удобную для транспортных установок механическую характеристику, когда с уменьшением частоты вращения растет момент. Механическая характеристика двигателя смешанного возбуждения – промежуточная между механическими характеристиками двигателя параллельного и последовательного возбуждения.
В двигателях последовательного возбуждения ток возбуждения равен току якоря.
В двигателях параллельного возбуждения момент пропорционален потоку, а в двигателях последовательного возбуждения – квадрату тока, поэтому двигатели последовательного возбуждения имеют большой пусковой момент и большую перегрузочную способность.
Двигатели последовательного возбуждения из-за особенностей своей механической характеристики не могут применяться в электроприводах, в которых возможно уменьшение момента сопротивления до нуля, что приведет к уменьшению тока в якоре и снижению потока, и двигатель пойдет в разнос. При этом увеличится частота вращения, и машина может выйти из строя.
Частоту вращения двигателей постоянного тока можно регулировать путем изменения напряжения, введения сопротивления в цепь ротора и изменения потока.
Наиболее распространенный способ регулирования частоты вращения – изменение потока возбуждения путем регулирования тока в обмотке возбуждения. Наиболее простой способ регулирования тока возбуждения – варьирование сопротивления регулировочного резистора в контуре возбуждения (см. рис.6, а, б).
При изменении тока возбуждения имеют место механические характеристики такие, как это показано на рис.7.2, а. Таким способом можно регулировать частоту вращения в пределах 1:1,5 и 1:2. Глубокое уменьшение потока недопустимо, так как при нагрузке реакция якоря будет «опрокидывать» поле возбуждения, что приведет к неустойчивой работе двигателя. Увеличение потока в обычных двигателях параллельного возбуждения нецелесообразно, так как магнитная система двигателей насыщена. При увеличении массы двигателя и принятии специальных мер можно увеличить пределы регулирования частоты вращения в ненасыщенных двигателях до 1:5, 1:8. Хотя этот способ обеспечивает сравнительно небольшие пределы регулирования частоты вращения, он является экономичным и находит широкое применение, когда пределы изменения частоты вращения небольшие.
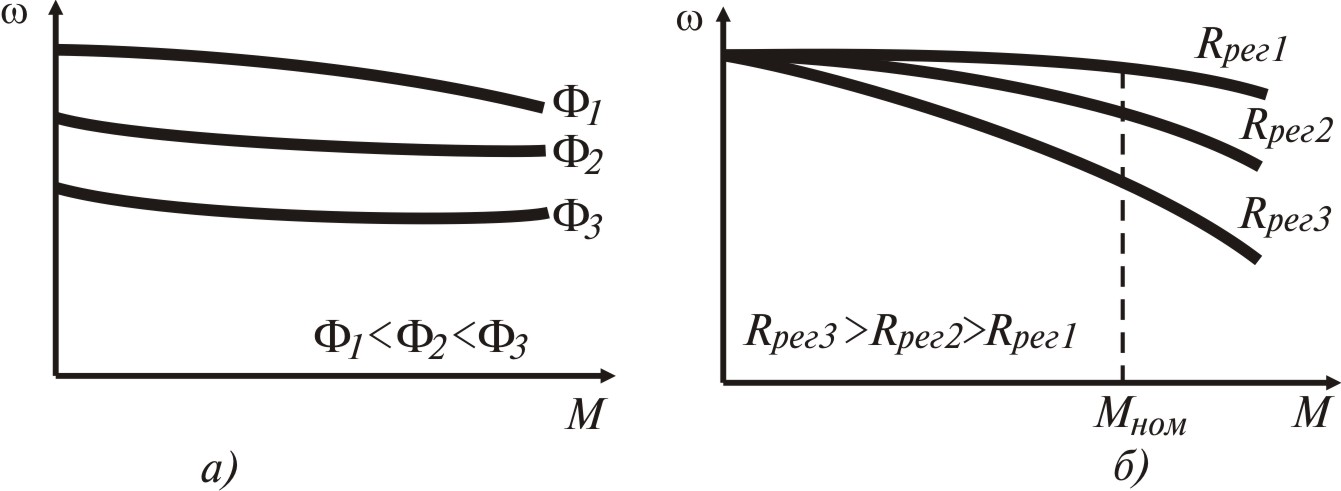
Рисунок 7.2. – Регулирование частоты вращения путем изменения потока возбуждения а и сопротивления в цепи якоря б.
Регулирование частоты
вращения путем введения
![]() позволяет изменять частоту вращения
в широких пределах, но этот способ
неэкономичен, так как регулировочный
резистор включается в силовую цепь и
на нем выделяется тепло, пропорциональное
квадрату тока нагрузки.
позволяет изменять частоту вращения
в широких пределах, но этот способ
неэкономичен, так как регулировочный
резистор включается в силовую цепь и
на нем выделяется тепло, пропорциональное
квадрату тока нагрузки.
Механические характеристики
при этом способе регулирования показаны
на рис.7.2, б.
Механические характеристики
при различных
выходят из одной точки, так как при
холостом ходе (![]() )
практически не влияет на падение
напряжения. При регулировании частоты
вращения путем изменения тока возбуждения
механические характеристики сходятся
вблизи точки
)
практически не влияет на падение
напряжения. При регулировании частоты
вращения путем изменения тока возбуждения
механические характеристики сходятся
вблизи точки
![]() ,
где
,
где
![]() – установившейся ток
короткого замыкания. Ток короткого
замыкания определяется внутренним
сопротивлением двигателя и напряжением,
которое равно напряжению сети.
– установившейся ток
короткого замыкания. Ток короткого
замыкания определяется внутренним
сопротивлением двигателя и напряжением,
которое равно напряжению сети.
Регулирование частоты вращения путем введения сопротивления в цепь якоря применяется в двигателях последовательного и смешанного возбуждения. В двигателях последовательного возбуждения для регулирования частоты вращения применяется также шунтирование обмотки возбуждения активным сопротивлением. При тех же пределах регулирования частоты вращения последовательное включение в цепь якоря и шунтирование обмотки возбуждения дают одни и те же технико-экономические показатели.
Лучшие механические характеристики и меньшие потери в двигателе постоянного тока достигаются при регулировании частоты вращения за счет подводимого к двигателю напряжения. Но, как и в машинах переменного тока, при этом способе регулирования частоты вращения необходимо иметь громоздкое устройство, обеспечивающее регулирование напряжения.