

Технологічні схеми роботи гідравлічних кар’єрних екскаваторів.
Робочий цикл гідравлічного екскаватора . Кожний екскаватор виконує певні технологічні операції по розробці та навантаженню гірських порід та корисних копали . Ці операції складають повний технологічний цикл роботи - tц, який вимірюється в секундах часу. Тривалість робочого циклу складає :
tц = tз + tпп + tр , с
Завантаження ковша (tз) - виконується поворотом рукояті щодо стріли і встановленням ковша до місця черпання. Положення ковша щодо рукояті і стріли щодо машини залишається незмінним.
Поворот платформи (tпп) - по закінченні завантаження ковша виконується поворот платформи з робочим обладнанням екскаватора. Ківш переміщається до місця розвантаження. Його положення щодо поворотної платформи машини не змінюється.
Розвантаження ковша (tр) - на гідравлічних екскаваторах здійснюється поворотом ковша щодо рукояті (перекиданням). перед розвантаженням ковша виконується підйом стріли екскаватора для збільшення навантажувальної висоти.На екскаваторах “пряма лопата” застосовуються також щелепні ковші, у яких розвантаження виконується відкривання днища ковша.
Зворотна лопата. Гідравлічний кар’єрний екскаватор “зворотна лопата” показаний на рис.11. Технологічна схема роботи гідравлічного екскаватора з робочим обладнанням “зворотна лопата” наведена на рис.12

Рис.11. Гідравлічний кар’єрний екскаватор з робочим обладнанням “зворотна лопата”
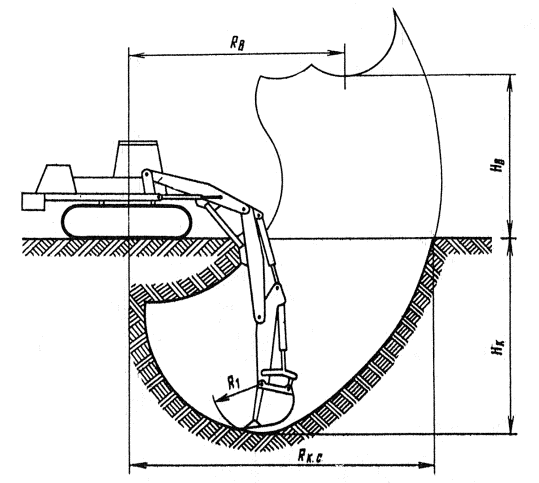
Рис.12. Схема роботи гідравлічного екскаватора з робочим обладнанням “зворотна лопата”.
Екскаватор встановлений перед місцем черпання грунту або гірської породи (Рис 12). За допомогою гідророзподільника подають робочу рідину в гідроциліндр рукояті, повертаючи її за годинниковою стрілкою. Стріла з рукояттю і винесеним вперед ківшем опускається з початкової точки А вниз, як під дією ваги робочого устаткування, так і під тиском рідині, що подається в гідроциліндр стріли і рукояті . Максимальний точка закидання ковша стрілою, складає величину Rк.с. Максимальна глибина копання для конкретного типу екскаватора і робочого обладнання становить Нк. Операцію копання здійснюють поворотом ковша і поворотом рукояті. Величину стружки в процесі копання регулюють за допомогою гідроциліндра шляхом підйому або опускання стріли. Після того, як наповнений грунтом ківш буде підтягнутий до стріли або повернений по відношенню до рукояті настільки, щоб грунт не висипався, робоче устаткування піднімають із забою за допомогою гідроциліндра стріли на висоту Нр, а потім разом з платформою повертають до місця розвантаження. Радіус робочої висоти розвантаження складає Rр. Щоб розвантажити ківш, повертають рукоять і ківш за годинниковою стрілкою, використовуючи для цього поворотну платформу і гідроциліндри стріли, рукояті і ковша.. Потім проводять зворотній поворот платформи до забою і робочий цикл повторюють. Для підвищення продуктивності машини суміщають підйом робочого устаткування і поворот платформи до місця розвантаження, а також опускання стріли із зворотнім поворотом до забою.
Пряма лопата. Гідравлічний кар’єрний екскаватор “пряма лопата” показаний на рис.13. Технологічна схема роботи гідравлічного екскаватора з робочим обладнанням “пряма лопата” наведена на рис.11.

Рис 13. Гідравлічний кар’єрний екскаватор з робочим обладнанням “пряма лопата”
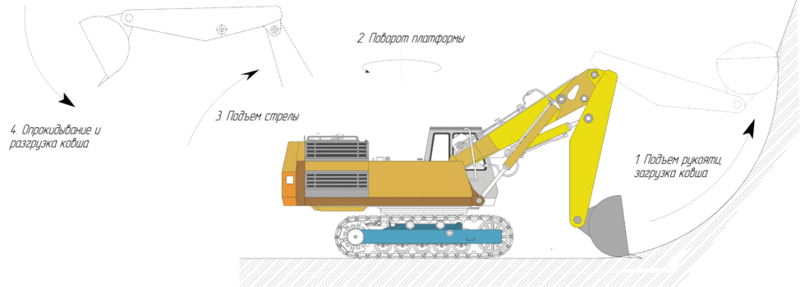
Рис.14. Схема роботи гідравлічного екскаватора з робочим обладнанням “пряма лопата”.
Пряма лопата працює слідуючим чином. Поворотну платформу екскаватора з встановленим на ній робочим обладнання встановлюють напроти робочого уступу або місця черпання корисної копалини. Стрілу, з опущеною рукояттю та ковшем в робочому первинному положенні встановлюють на місце черпання на рівні стоянки екскаватора (Рис.14).. Щоб заповнити ківш, рукоять переводять з одного положення у інше положення ( Рис.14) , висуваючи шток гідроциліндра рукояті. Заглиблення ковша і регулювання товщини стружки грунту проводять гідроциліндрами рукояті і стріли, опускаючи або піднімаючи її по відношенню до поворотної платформи на потрібну висоту. Після того, як ківш наповниться грунтом або породою, піднімають стрілу і відводять ківш із забою на висоту робочого розвантаження в транспортний засіб. Потім, повертаючи платформу разом з робочим устаткуванням, переміщають грунт до місця розвантаження. При цьому одночасно піднімають ківш на робочу висоту для економії часу . З цією метою використовують як гідроциліндр стріли, так і гідроциліндр рукояті. Для розвантаження ковша або відкривають його днище, втягуючи шток гідроциліндра ( щелепні ковші) , або повертають ківш окремим гідроциліндром. Потім повертають ківш до забою і робочий цикл повторюють. Операції зворотного повороту і опускання ковша в початкове положення для копання зазвичай суміщають з метою скорочення тривалості робочого циклу машини і підвищення її продуктивності.
Продуктивність одноковшового экскаватора розраховується за формулою:

де:
,![]() сек.
сек.
Vk – ємність ковша, м 3
kнап - коефіцієнт наповнення ковша;
kзм - коефіцієнт використання часу зміни;
Тц – тривалість робочого циклу, сек.;
kроз - коефіцієнт роз рихлення гірської маси;
tзап - час заповнення ковша, сек.
tпз – час повороту екскаватора з заповненим ківшем в положення розвантаження;
tр - час розвантаження ковша ковша;
tпп – час повороту екскаватора з порожнім ковшем в початкове робоче положення (час холостого ходу);
tм – час маневрування на протязі циклу.
Література.
1.Беркман И. Л. Универсальные одноковшовые строительные экскаваторы / И. Л. Беркман, А. В. Раннев, А. К. Рейш. — М., Машиностроение, 2007 г.
2.Краткий справочник машиниста экскаватора / под. ред. А. Ф. Яковлева, М. Машиностроение - 2002 г.