

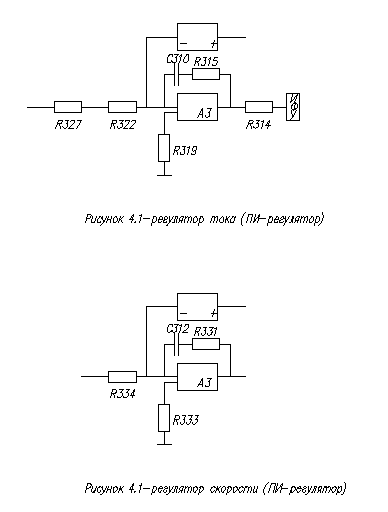
2.6 Расчет регулятора тока, его настройка на модульный оптиум
Контур регулирования тока, как правило, настраивается на модульный оптиум (МО). Настройка на МО применяется для систем, цель которых – отработка управляющего сигнала с максимальной быстротой.
Передаточная функция Wp.T. (P) выбирается из условия равенства результирующей передаточной функции
WP.T(P) *(KT* Ka /Ry(1+Tμp)( 1+Tμp))=1/2* TμTp(1+TμTp),
WP.T(P) =1+TyP/TE.O.p,
где постоянная интегрирующая регулятора тока
TE.O.(p)*Kao*Ed*Oμo/Ry= 0,769*50,67*0,009/3,79=0,0925
Eao = 5/Iao = 5/6.5=0.769,
Kdm=0,769 – коэффициент передачи датчика тока.
Коэффициент усиления разомкнутого токового контура в соответствии со структурой схемой:
Kpm= (KB*Kao/Ry)*(R348*R322/R306) = (50.67*0.769/2.96)(0,051+15/12,42)=16,55
Глубина ООС по току выбираем из условия:
Kpm≤Ty*m*f =0.0513*6*50= 15.39
Принимаем Kpm=16 и определяем величину сопротивления:
R306= 13,2* R348 + R322/ Kpm=13,2*0,05+15/16=12,42
R348 =кОм; R322=кОм
64
Найдем емкость конденсатора С310
С310=TYO / R348 + R322= 0,0513/0,051+15 = 3,4
Сопротивление цепи О.С. регулятора
R315=Tum/ С310=0,0925/ 3,4 = 27.2
2.7 Расчет регулятора скорости
Регулятор скорости будем настраивать на симметричный оптиум (СО), чтобы поддержать регулируемую величину на задающем уровне и с необходимой точностью.
Расчет регулятора скорости начинаем с определения некомпенсированной постоянной времени контура
Tμc = 2*TμT +Tфms ,
где Tфms постоянная времени фильтра якорной цепи тахогенератора, численное значение которой определяется коэффициентом пульсации ЭДС тахогенератора.
Для снижения пульсации устанавливаем фильтр с постоянной
Tфms=√K2-1/2π*f*m = 0.002c
времени:
К – коэффициент снижения пульсации в К раз «3-н 4».
Тогда Тmc =2*0,009+0,002=0,02n
Задаваясь емкостью С314=1,6мкФ, находим сопротивление R331
R331=4* Tμc / С314=4*0,02/1,6*10-6=50ep
Передаточная функция регулятора скорости
Wpc.(P) = Tp(P)+1/Tup ,
Где Tp – постоянная времени формирующего звена
65
Tp= Ty/1+Kpm=0,0513/1+16=0,003с,
а постоянная интегрирования
Tu = 8*T2o*Ka*Kc/Tμ*Ce(1+ Kpm) = =8(0.003)2*50.67*0.076/0.044*1.26(1+16)=0.00029n
Na = Uon – Iyon *Ry/ωan=220-6,5*3,31/157,5=1,26
Полученная передаточная функция соответствует ПИ – регулятору.
Передаточная функция:
Wdaa (P)= Tp (P)+1/ Tup
Основные соотношения:
Tp= R331C312; ωС2=Т2
Из выражения: TU = R503*C312
Из выражения: Tp = R331*C312
Вычисляем коэффициент усиления пропорциональной части регулятора
R331= Tp / TU=0,012/878*10-3=0,137 кОм
С331= C312/ R503=0,00029/3,3*10-3=87,8 мкФ
С целью уменьшения перерегулирования на вход системы включается фильтр с постоянной времени.
Емкость конденсатора:
По найденным расчетам значениям подбираем стандартные:
С500=Тф(R500+R501) / (R500*R501)=0,176(3,3+3,3)*103/(3,3*3,3)106=106,6*10-6Ф
R315=32кОм; С310=4мкФ;
R501=3,3кОм; С312 =10 мкФ;
R500=3,3кОм; С314=10 мкФ;
R333=32кОм; С500=20 мкФ.
K331=3,3кОм;
K308=30кОм;
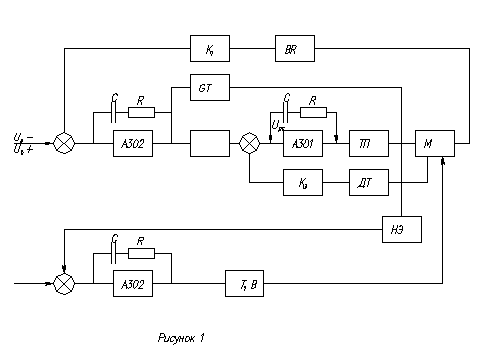
Структурная схема электропривода приведена на рисунке 1
66
67
68