

7. Наведіть перелік головних технічних параметрів промислового робота.
Технологічні можливості та конструкцію ПР визначають такі основні параметри: вантажопідйомність, число ступенів рухомості, форма і розміри робочої зони, мобільність, похибка позиціонування, тип керуючої системи (КС).
8. Надайте означення промислового робота та охарактеризуйте основні його складові частини.
Промисловий робот — автоматична машина, що перепрограмовується й використовується у виробничому процесі для виконання рушійних функцій, аналогічних функціям людини, при переміщенні предметів виробництва та (чи) технологічної оснастки. Для виконання цих функцій ПР має маніпулятор та пристрій керування.
У загальному випадку робот складається з чотирьох систем:
1) виконавчої маніпуляційної системи (МС) - для цілеспрямованої дії на НС (ОМ); 2) сенсорної інформаційно-вимірювальної системи (ІВС) - для забезпечення робота інформацією про стан НС, результати дії на нього МС (або взаємодії системи "робот-ОМ- НС") і стан самого робота у відповідності з вимогами керуючої системи (КС); 3) керуючої системи (інтелекта) - для формування закону керування МС на основі даних, які надходять від керуючої програми та ІВС, а також для організації спілкування робота з людиною чи іншими функціональними пристроями, з якими він взаємодіє (інтелектуальні здатності робота визначаються алгоритмічним і програмним забезпеченням його КС); 4) системи зв'язку (СЗ) - для організації обміну інформацією між роботами і людиною чи іншими функціональними пристроями (у тому числі роботами, основним технологічним обладнанням) на якійсь зрозумілій їм мові.
9. Наведіть схему структури промислового робота та поясніть основні складові структури пр.
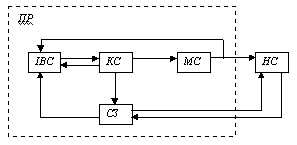 Рис
1.2. Узагальнена структура робота,
взаємодіючого
з навколишнім середовищем (НС).
Рис
1.2. Узагальнена структура робота,
взаємодіючого
з навколишнім середовищем (НС).
10 Інформаційно-вимірювальна система (івс).
Задача ІВС - збирання, первинна обробка і передача в КС даних про функціонування вузлів і механізмів ПР (у тому числі і блоків КС) та про стан НС. За функціональним призначенням ІВС умовно поділяються на три підсистеми: 1) сприйняття й переробки інформації про НС, в якому функціонує ПР; 2) внутрішньої інформації про стан вузлів, механізмів і систем ПР; 3) забезпечення техніки безпеки. Дані цих під-систем створюють інформаційне забезпечення роботи ПР.
Підсистема зовнішньої інформації визначає функціональні можливості ПР і ступінь складності вирішуваних ним завдань. Залежно від способу взаємодії з об'єктами НС ця підсистема може виконувати функції зорового (візуального, локаційного) і тактильного (дотику) сприйняття ознак середовища. Тактильне сприйняття використовується для виявлення об'єкта, встановлення моменту стикання з ним і визначення його розмірів, контролю тиску на об'єкт, виявлення підготовленості основного технологічного обладнання до обслуговування роботом, а також для забезпечення безпеки роботи. З цією ж метою, але із застосуванням безконтактних засобів використовується і зорове сприйняття; одночасно такі засоби переважно виконуються для дистанційного виявлення об'єкта і розв'язання задач ідентифікації класу та положення, яке займає об'єкт у просторі.
Підсистема внутрішньої інформації розв'язує задачі: оцінки положення і швидкості руху ступенів рухомості ПР, аварійної блокіровки для запобігання поломці вузлів МС і взаємодіючого з нею обладнання при появі випадкових збоїв, діагностики і прогно-зування ресурсу ГІР для виявлення причин відказів і скорочення часу відновлення працездатності ПР.