

34. Дайте означення пристроїв подавання та охарактеризуйте область їх застосування.
Пристрої подавання (ПП) - це різного роду функціональні механізми, що здійснюють живлення технологічного обладнання заготовками чи деталями. Функції ПП полягають у захваті, утримуванні та встановленні виробів на робочу позицію технологічного обладнання.
Галузь застосування ПП визначається характером здійснюваного в РТС технологічного процесу, але в будь-якому разі їх призначення полягає у виконанні допоміжних операцій по завантаженню та розвантаженню основного обладнання.
Вид технологічного процесу — механічна обробка, складання виробів, нанесення покриття, виконання контрольних та інших операцій впливає переважно на конструкцію ПП. Це пояснюється тим, що розміщення самого ПП і конструкція його робочих органів, як правило, визначаються компоновкою робочих агрегатів технологічного обладнання та типом оброблюваних на цьому обладнанні виробів, тобто їх геометричними та фізико-механічними характеристиками.
Розширення функціональних і технологічних можливостей ПП можна досягнути застосуванням розглянутих вище принципів агрегатування їх робочих органів або використанням методу регулювання окремих параметрів: переміщення виконавчих механізмів, діапазону розкриття затискних елементів робочих органів тощо. Таким чином, розширення технологічних можливостей ПП завжди пов'язано з усуненням у певній мірі впливу обмежень, які накладаються на їх конструкцію типорозмірами та формою виробів, які обслуговуються.
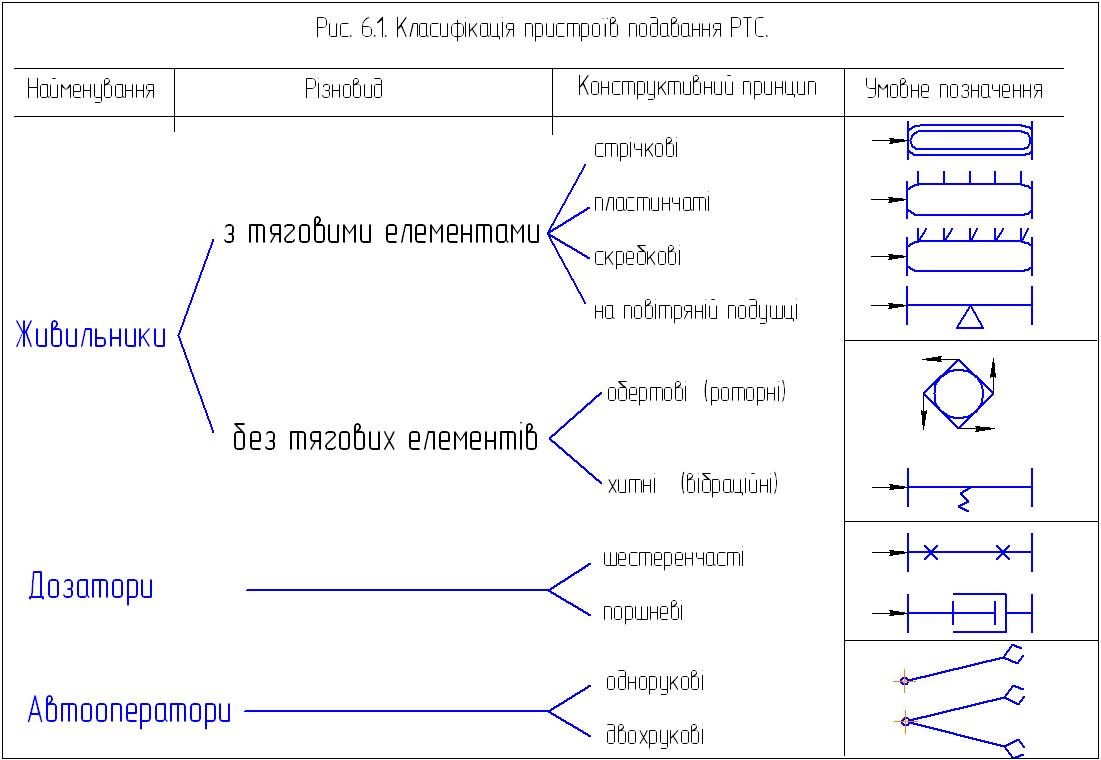
35. Надайте класифікацію пристроїв подавання.
Всі ПП, що застосовуються у роботизованому виробництві, поділяються на три основні групи (табл. 6.1):
1) живильники;
2) дозатори;
3) автооператори.
Представники кожної з цих груп характеризуються такими ознаками: - ступенем технологічної універсальності, що визначається діапазоном типорозмірів
і форм завантажуваних на робочі позиції заготовок (розрізняють спеціалізовані та переналагоджувані подавальні пристрої);
- принципом дії, що визначається, як правило, типом приводу, що використовується у
виконавчих органів;
- конструктивним виконанням, тобто формоутворенням і відносним розташуванням виконавчих та робочих органів.
36. Назвіть основні функції живильників, дозаторів та автооператорів.
Живильники — це різновид ПП, що здійснюють поштучне подавання заготовок (деталей) на позицію їх обробки (складання). Функції живильників полягають у відокремленні однієї заготовки з потоку зорієнтованих або завантажених навалом заготовок і встановленні їх або безпосередньо на базуючі елементи робочої позиції, або на позицію поштучного видавання заготовок, звідки вони можуть бути забрані маніпулятором або автооператором.
Живильники класифікують за наявністю тягового елемента (табл. 6.1), тобто здатністю здійснювати операції, крім завантаження та транспортування заготовок. Розрізняють такі види живильників: з тяговими елементами, стрічкові, пластинчасті, скребкові та живильники з переміщенням робочого органу чи самих заготовок на повітряній подушці. Живильники без тягового елемента поділяються на обертові та хитні. Це означає, що робочий механізм цього підкласу живильників здійснює при завантаженні обладнання обертальний або хитальний рух. При цьому, як випливає з табл. 6.1, обидва види живильників можуть мати різні типи приводів і конструкції захватного пристрою.
Дозатори — це подавальні пристрої, що здійснюють переважно порціонне подавання заготовок або матеріалів (наприклад, сировини) на позиції їх обробки. Зазначені в табл. 6.1 дозатори відрізняються конструктивним виконанням подавального робочого органа - елемента виконавчого механізму, який безпосередньо контактує із заготовками чи матеріалами. Крім виконання основних функцій — відокремлення частини заготовок від загальної їх маси, дозатори, зокрема, гвинтові чи шнекові, можуть здійснювати міжопераційне транспортування заготовок.
Автооператори — це подавальні пристрої, що об'єднують виконавчі механізми, які мають один або два ступені рухомості і, на відміну від живильників, здійснюють не тільки завантаження, а й розвантаження технологічного обладнання.
Основними елементами автооператора є виконавчі механізми переміщення заготовок (деталей) та ЗП. Автооператори по суті представляють собою різновид маніпуляторів, але з обмеженим ступенем рухомості та спеціалізованим призначенням. Їх переважно використовують для завантаження та розвантаження металообробних верстатів та обладнання штампо-пресового виробництва. Разом з тим, їх застосування можливе також і при виконанні складальних операцій за наявності відповідного технологічного обладнання.