

2.3 Выбор двигателей и редукторов
Следующим этапом является выбор силовых компонентов привода, а именно приводного двигателя и редуктора.
Напомним, что приводной двигатель относится к ДПТ, и выбор его осуществляется по мощности из каталогов. Рекомендуемый диапазон выбора составляет
![]()
где P – мощность двигателя из таблицы 2.2.
Так для первой траектории следует выбирать двигатель в интервале
![]() (2.7)
(2.7)
а для второй
![]() (2.8)
(2.8)
Воспользовавшись каталогом [1, с. 47], выберем по два разных двигателя на каждую траекторию. Выбранные двигатели отражены в таблице 2.3.
Таблица 2.3 – Выбор приводного двигателя
Маркировка |
Pн, Вт |
nн, рад/с |
Uя н, В |
Iя н, А |
Rя, Ом |
Jд, кгм2 |
Масса, кг |
Tяц, мс |
Lя, мГн |
Для 1-ой траектории |
|||||||||
МИГ-400А |
400 |
314 |
60 |
8,30 |
0,76 |
16010-6 |
14,6 |
0,68 |
–– |
2ПН100LУХЛ4 |
420 |
78,5 |
110 |
5,60 |
2,05 |
0,012 |
39 |
–– |
71 |
Для 2-ой траектории |
|||||||||
МИГ-600А |
600 |
314 |
110 |
6,30 |
1,40 |
43010-6 |
20 |
0,75 |
–– |
2ПН100LГУХЛ4 |
630 |
111 |
220 |
3,40 |
4,92 |
0,012 |
39 |
–– |
169 |
Редуктор выбирается по передаточному
отношению i и по массе
![]() .
Наиболее простым способом определения
передаточного числа является графический
способ, основной идеей которого является
совмещение на одной плоскости функции
момента двигателя от передаточного
числа редуктора M(i)
и функции угловой скорости на валу
нагрузки от передаточного числа редуктора
и момента двигателя
.
Наиболее простым способом определения
передаточного числа является графический
способ, основной идеей которого является
совмещение на одной плоскости функции
момента двигателя от передаточного
числа редуктора M(i)
и функции угловой скорости на валу
нагрузки от передаточного числа редуктора
и момента двигателя
![]() .
.
Затем отбрасываются такие значения i, которые не удовлетворяют следующим критериям
![]() (2.9)
(2.9)
где ![]() – номинальный момент двигателя.
– номинальный момент двигателя.
Первое условие в (2.9) гарантирует нормальную работу двигателя, а второе – необходимый диапазон выходных значений по угловой скорости.
Без вывода функция M(i) имеет следующий вид [1, c. 23]
 (2.10)
(2.10)
Зависимость
![]() строится через механическую характеристику
ДПТ, которая определяется через следующие
расчетные выражения
строится через механическую характеристику
ДПТ, которая определяется через следующие
расчетные выражения

 (2.11)
(2.11)
где ![]() – коэффициент, который учитывает потери
в скорости;
– коэффициент, который учитывает потери
в скорости;
![]() – номинальная мощность двигателя;
– номинальная мощность двигателя;
![]() – номинальная угловая скорость двигателя;
– номинальная угловая скорость двигателя;
![]() – номинальный ток и сопротивление
якорной цепи;
– номинальный ток и сопротивление
якорной цепи;
![]() – коэффициент момента и скорости
соответственно.
– коэффициент момента и скорости
соответственно.
Зная механическую характеристику двигателя и учитывая, что редуктор работает на понижение скорости, угловая скорость нагрузки рассчитается по формуле
![]() (2.12)
(2.12)
Отметим, что важно иметь графическое представление функций (2.10) и (2.12), и, так как процесс построения итерационный, его алгоритм можно записать так
Удобнее всего построение выполнить в пакете Mathcad, где имеется возможность программировать алгоритмы. Здесь мы лишь ограничимся графиками из приложения А 2, где отражен процесс построения.
Выбор редукторов производится для двигателей из таблицы 2.3 соответственно по графикам рисунков 2.4 – 2.7. Помимо необходимых графиков, построены линии уровня условий (2.9).
В таблицу 2.4 сведены все интересующие нас значения для выбора редукторов. В таблице 2.4 i1 и i2 – соответственно левый и правый допустимый предел выбора передаточного отношения редуктора для конкретного двигателя.

Рисунок 2.4 – Выбор передаточного числа редуктора для МИГ-400А

Рисунок 2.5 – Выбор передаточного числа редуктора для 2ПН100LУХЛ4
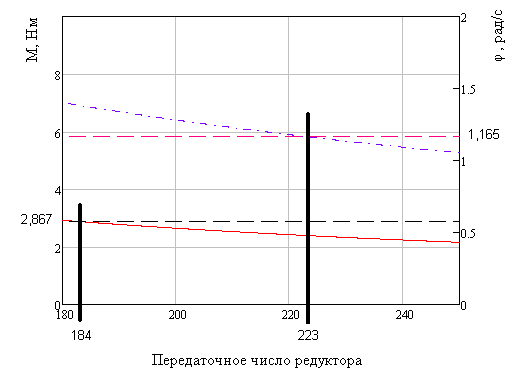
Рисунок 2.6 – Выбор передаточного числа редуктора для МИГ-600А
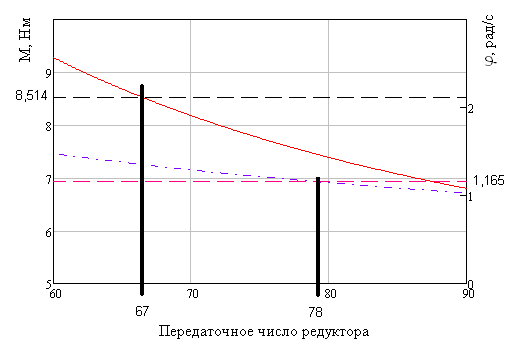
Рисунок 2.7 – Выбор передаточного числа редуктора для 2ПН100LГУХЛ4
Таблица 2.4 – Выбор передаточного отношения редукторов
№ п/п |
Двигатель |
Mд.ном, Н∙м |
1,5∙Mд.ном, Н∙м |
i1
|
i2
|
, рад/с |
Прим. |
Для 1-ой траектории |
|||||||
1 |
МИГ-400А |
1,274 |
1,911 |
262 |
335 |
0,776 |
Рис. 2.4 |
2 |
2ПН100LУХЛ4 |
5,350 |
8,025 |
66 |
83 |
Рис. 2.5 |
|
Для 2-ой траектории |
|||||||
3 |
МИГ-600А |
1,911 |
2,867 |
184 |
223 |
1,165 |
Рис. 2.6 |
4 |
2ПН100LГУХЛ4 |
5,676 |
8,514 |
67 |
78 |
Рис. 2.7 |
|
Второе ограничение, которое накладывается на редуктор это его масса. Масса редуктора должна быть такой, чтобы в итоге выполнялось условие
![]() (2.13)
(2.13)
Выбор будем осуществлять среди планетарных редукторов фирмы Brevini. В частности данная фирма предлагает редукторы с большим диапазоном передаточных отношений и минимальным КПД 90% [3].
В таблицу 2.5 сведены выбранные редукторы. В приложение В выведены паспортные данные по редуктору ET3010.
Таблица 2.5 – Выбранные редукторы
Маркировка |
Двиг. |
i
|
Мm, Нм |
, рад/с |
КПД
|
mредукт., кг |
km |
ET3010 |
(1) |
276,6 |
859 |
5,4 |
0,9 |
22 |
2,51 |
(2) |
79,29 |
925 |
18,9 |
0,9 |
1,56 |
||
(3) |
211,4 |
852 |
7,1 |
0,9 |
2,10 |
||
(4) |
68,55 |
920 |
21,9 |
0,9 |
1,56 |