

57. В имеющуюся Сборку 2 вставляем созданные детали двух осей (рис.3.91).
Рис.3.91
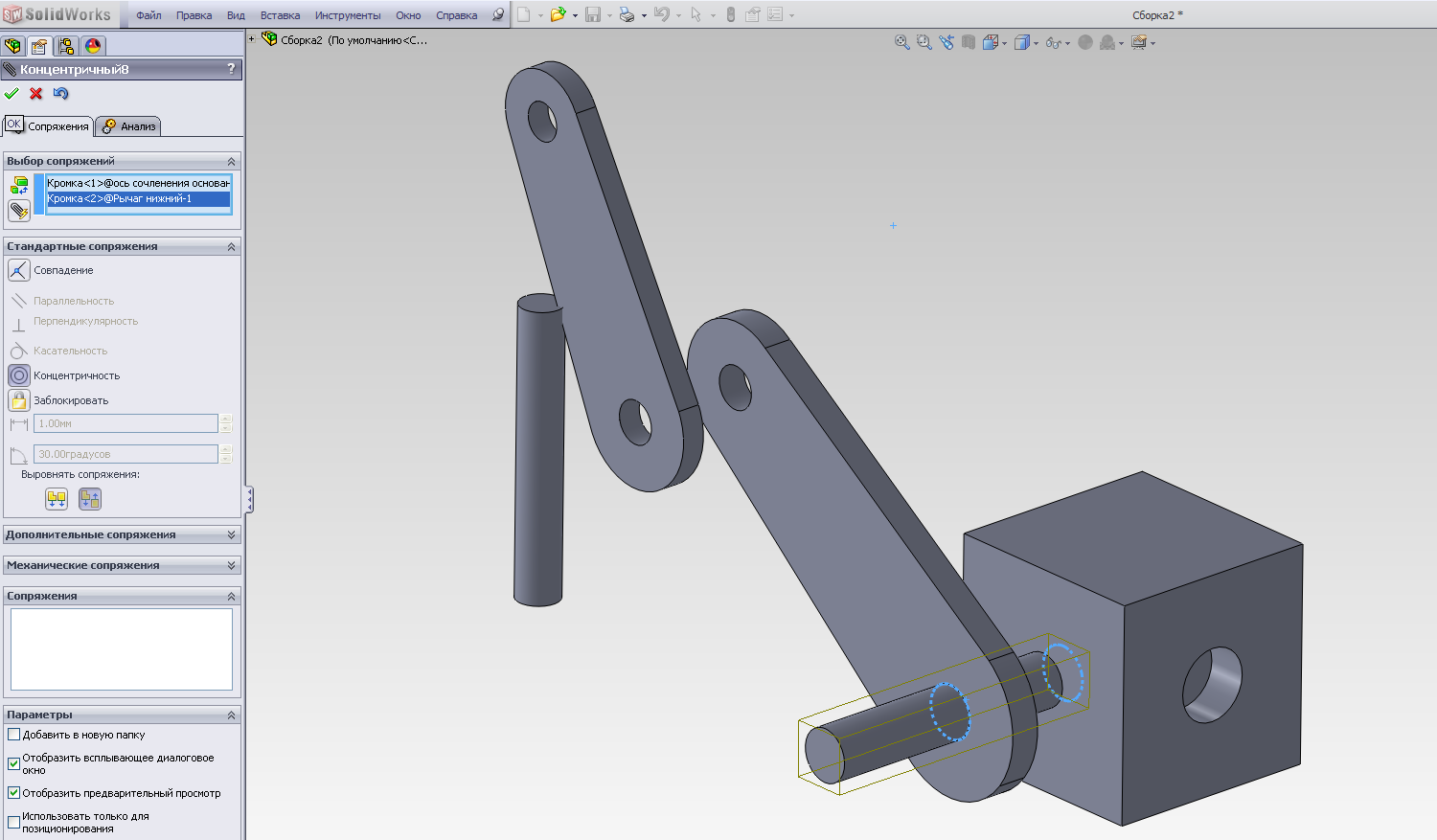
Рис.3.92
58. Устанавливаем концентрическое сопряжение нижней оси с основанием(рис.3.92).
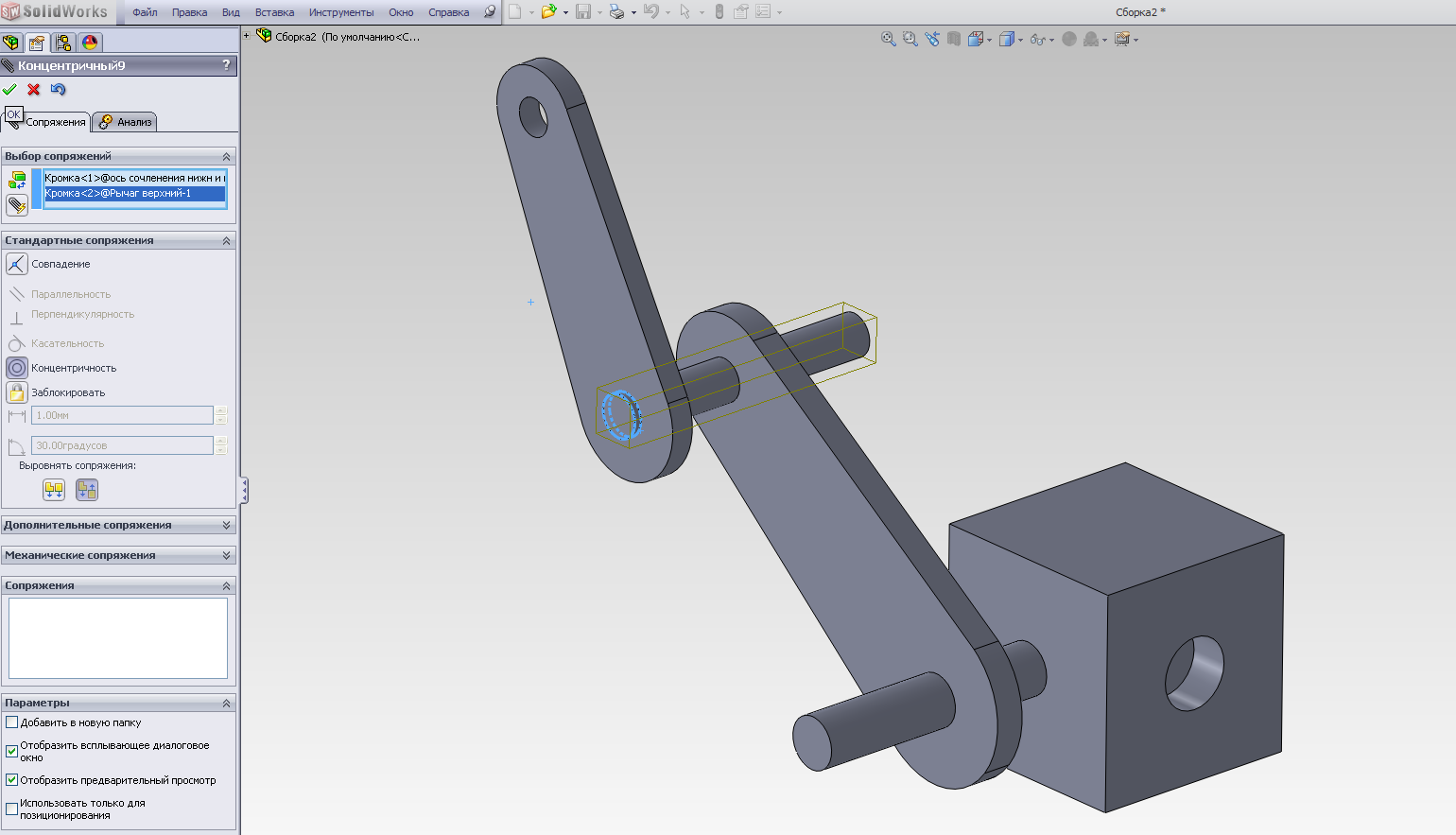
Рис.3.93
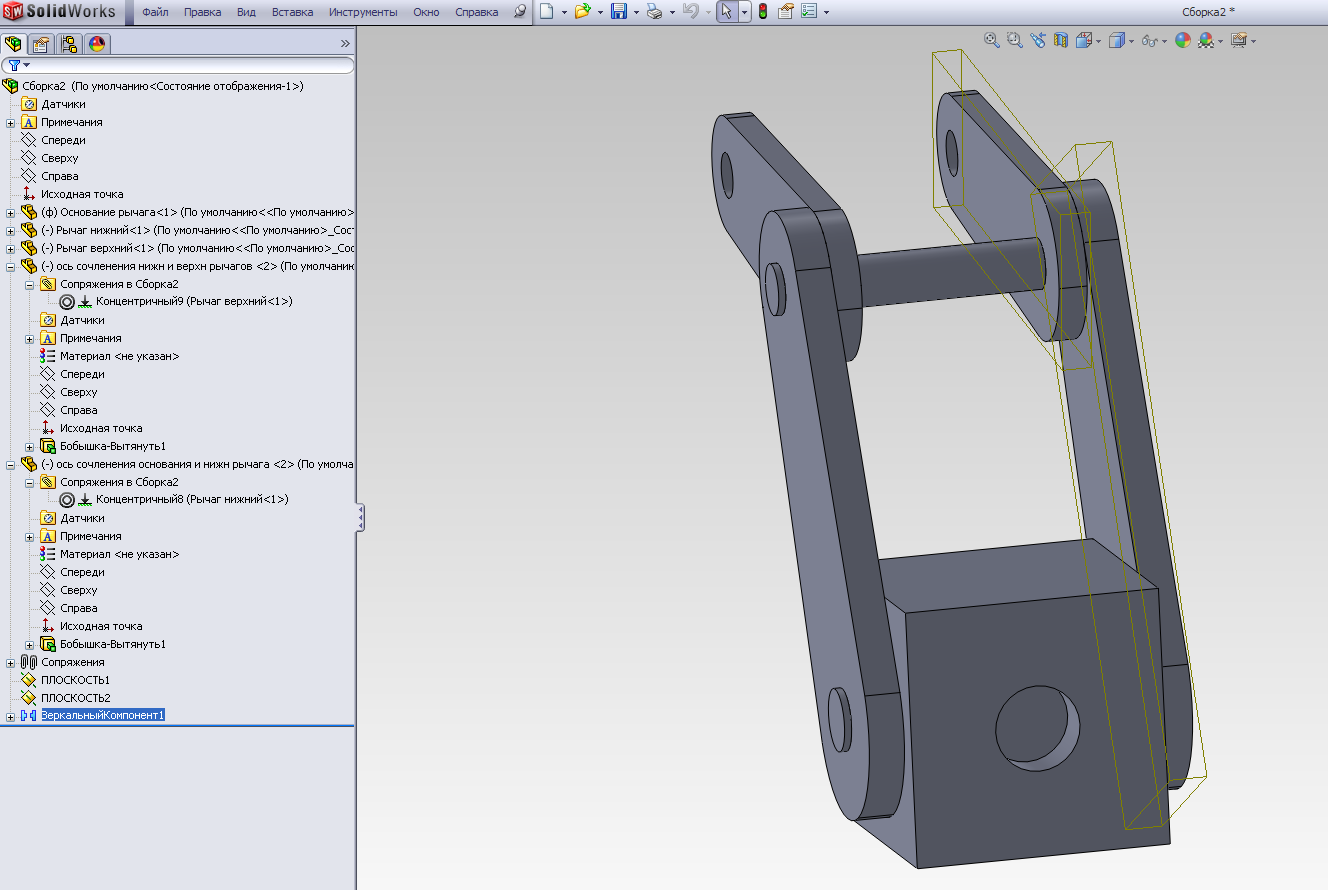
59. Устанавливаем концентрическое сопряжение верхней оси с верхним рычагом (рис.3.93).
Теперь выровняем нижнюю ось, сделав её симметрично расположенной относительно детали основания.
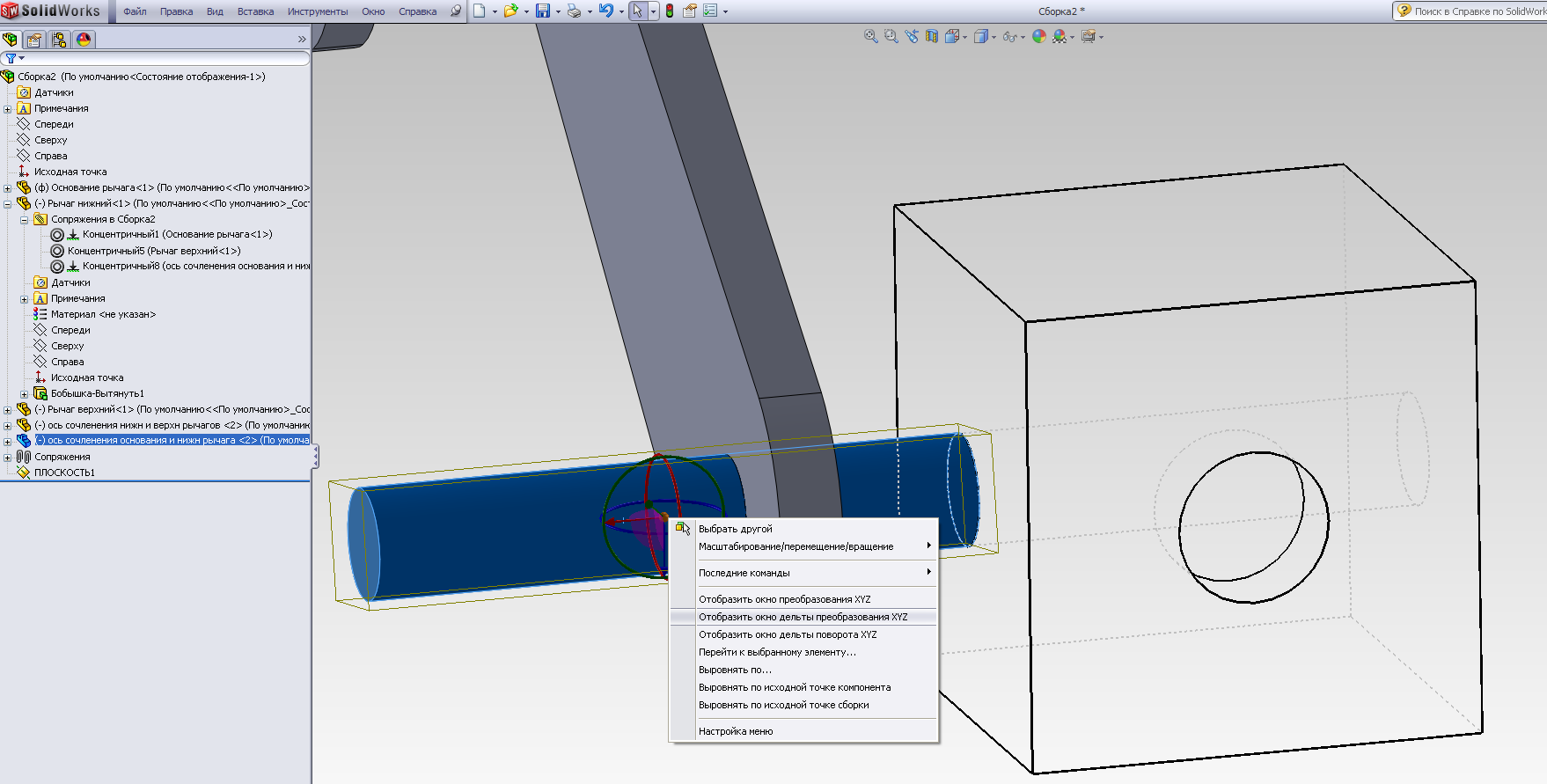
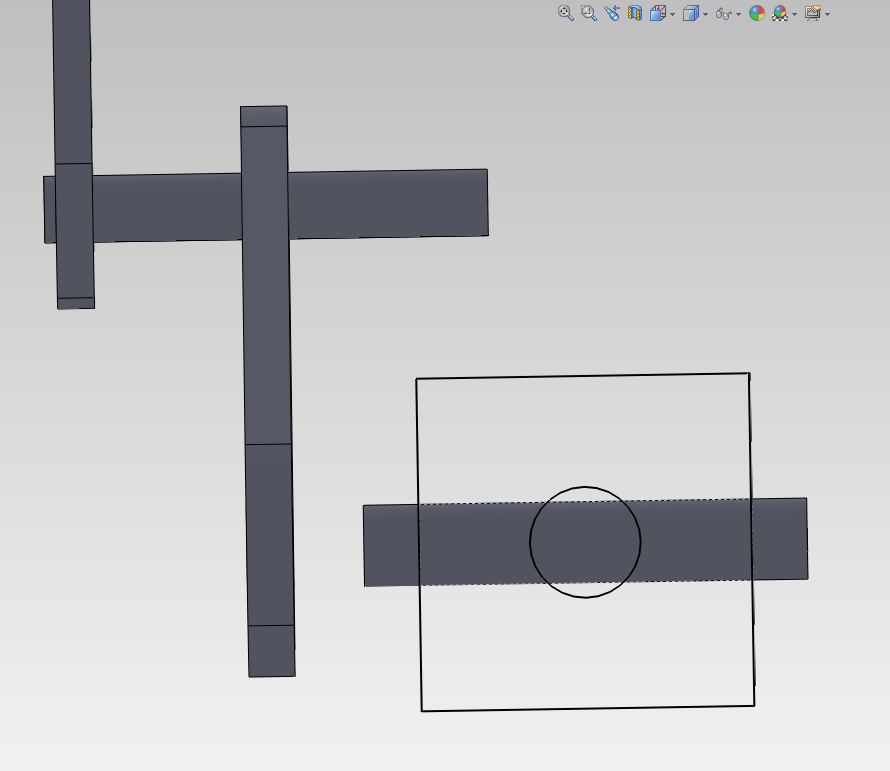
60. Вначале делаем совпадение левой грани основания с соответствующим торцомнижней оси,но не устанавливаемих сопряжение, для того чтобы можно было свободно двигать деталь (нижнюю ось) вдоль её продольной оси симметрии (3.94).

Рис.3.94
61. Далее вызываем систему связанных ортов, выбрав в выпадающем меню, появляющемся после нажатия правой кнопки, режимОтобразить окно дельты преобразования. Для определения величины сдвига dx воспользуемся чертежами, приведенными на рисунках 2.7, 2.10 и 2.17; с учетом ориентации детали в сборке относительно выбранной SW системы координат (отображаемой в левом нижнем углу) для указанного сдвига (приращения) находим: dx=(240-180)/2-240=-210 (рис.3.95 а)и двигаем деталь(нижнюю ось) по оси x на величину dx (рис.3.95 б).
а)
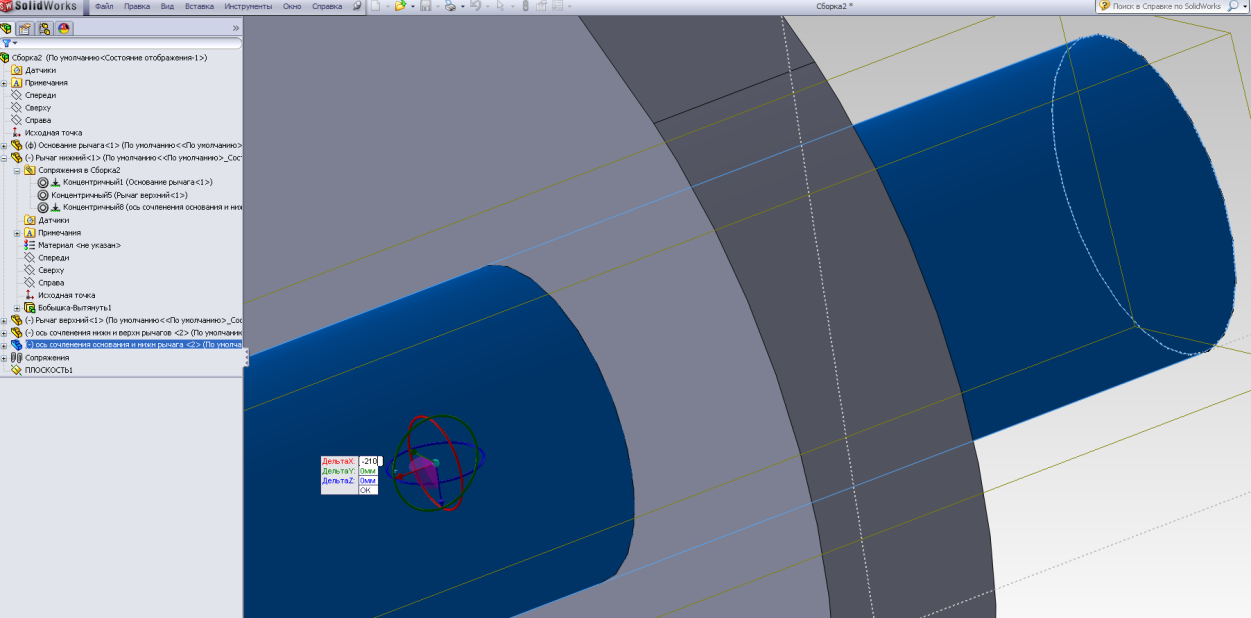
б)
в)
Рис.3.95
В результате нижняя ось устанавливается симметрично (см. рис.3.95 в) относительно соответствующей плоскости симметрии основания.
62. Приведем нижний рычаг в положение касания с соответствующей гранью основания (рис.3.96).
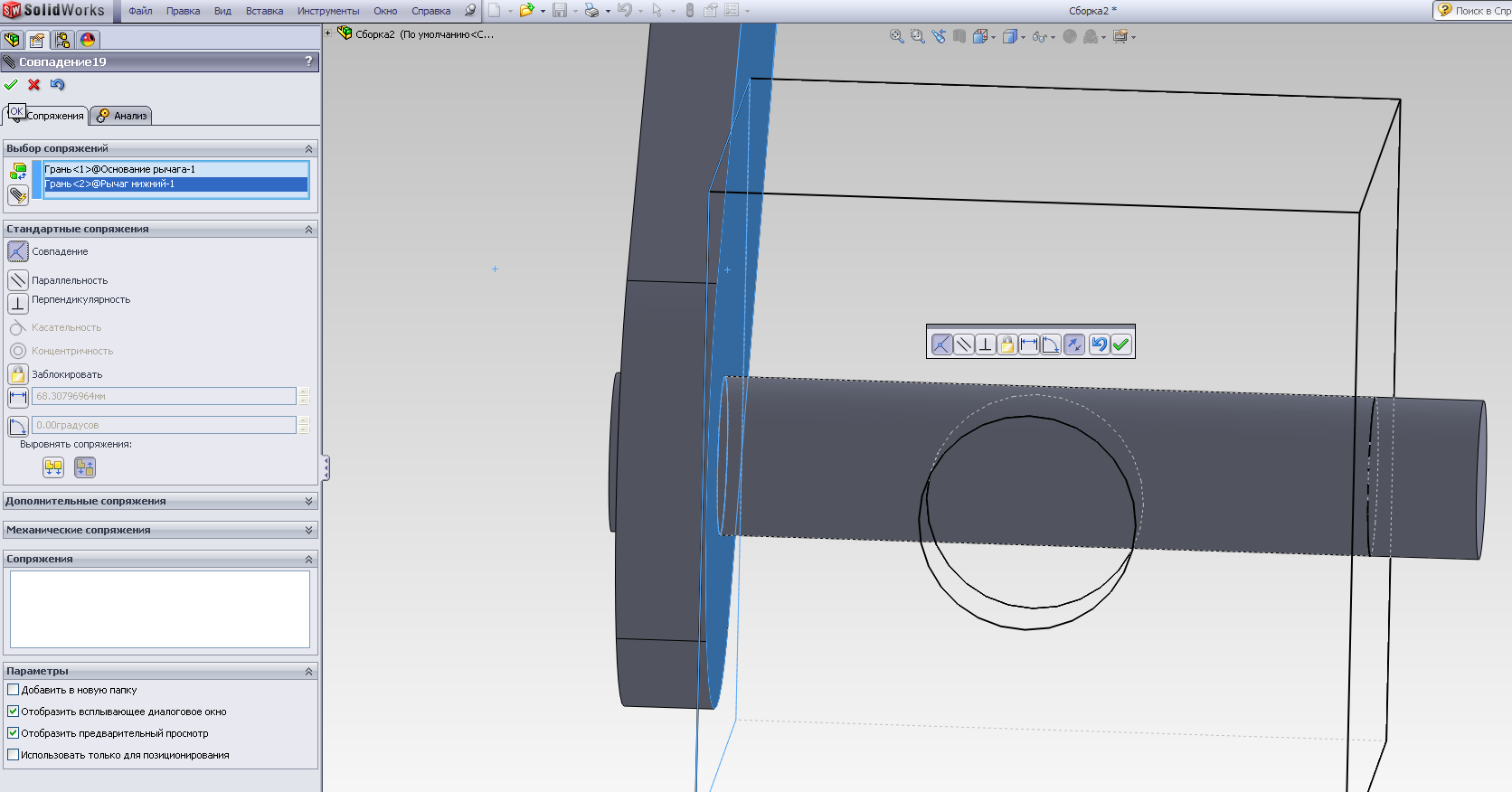
Рис.3.96
63. Приведем теперь верхнюю ось к той же проэкционнойориентацииотносительно оси x, что и нижнюю ось уже рассмотренным ранее способом (т.е. сделаем верхнюю ось симметричной относительно соответствующей плоскости симметрии основания) (рис.3.97).
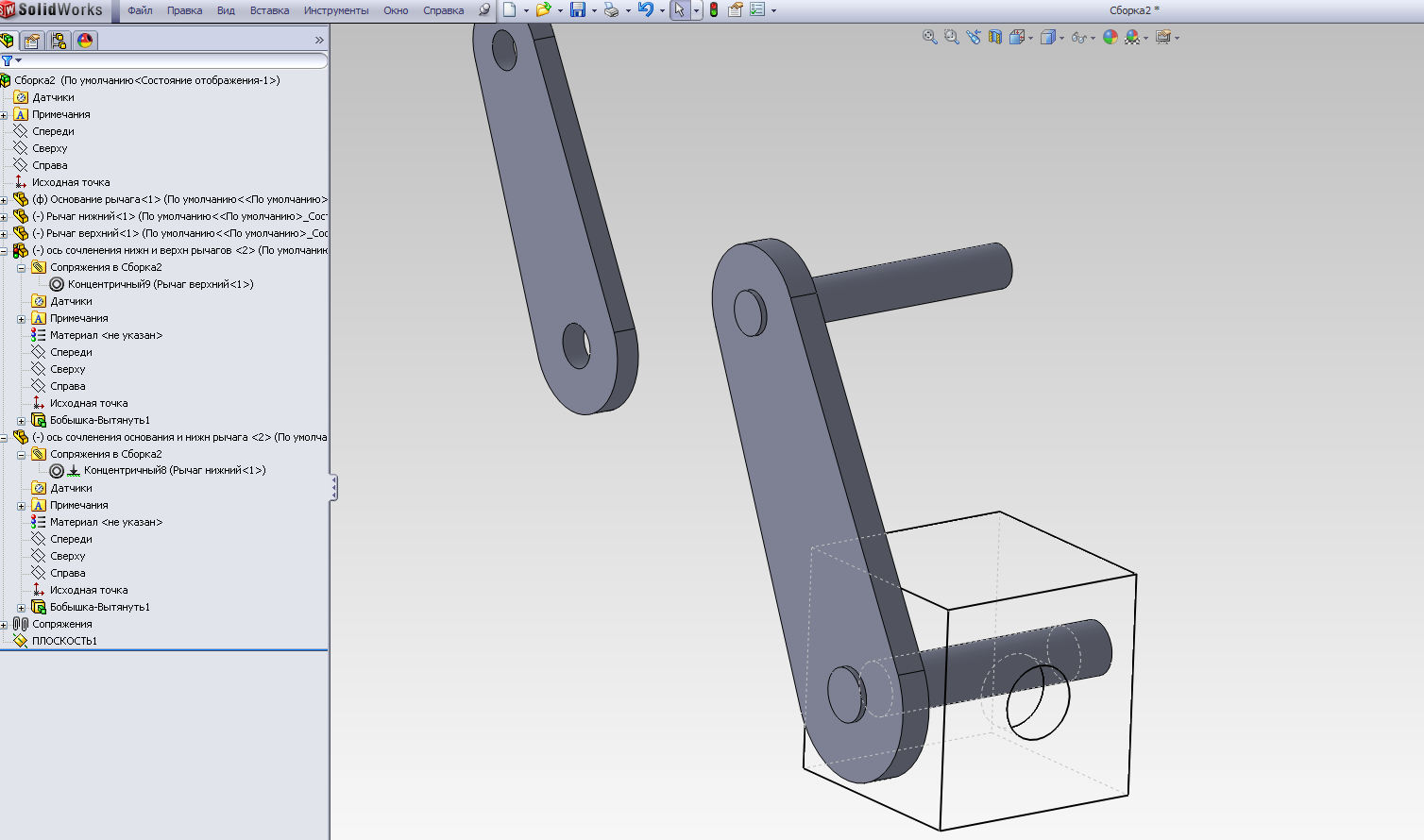
Рис.3.97
64. Далее, согласно сборочным видам рисунка 2.14, совместим плоскости соответствующих граней верхнего и нижнего рычагов (рис.3.98).
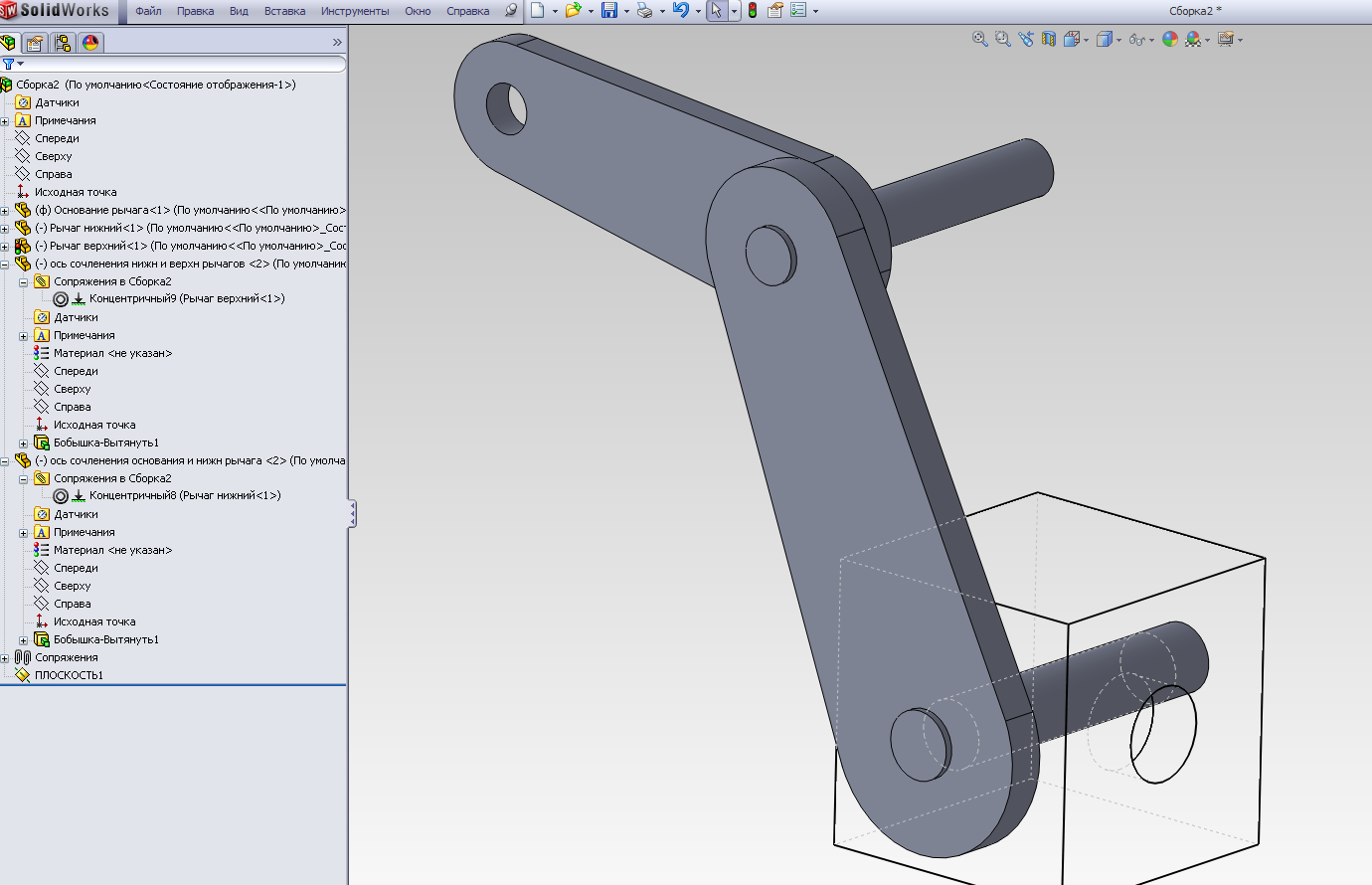
Рис.3.98
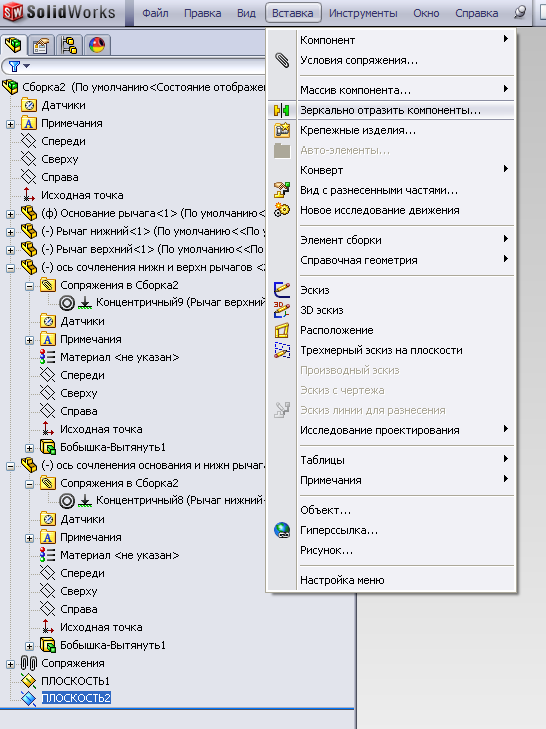
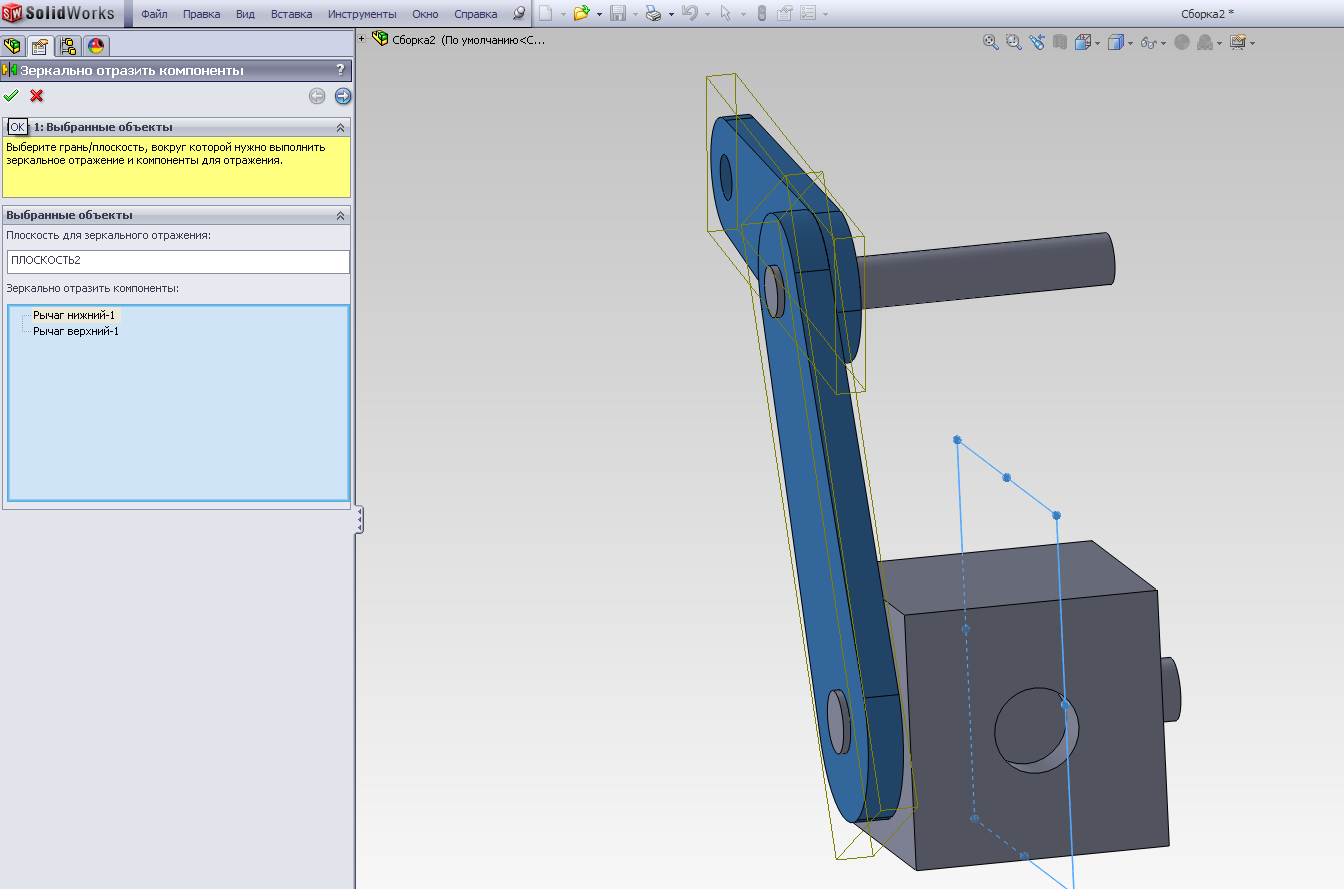
65. Теперь требуется создать плоскость симметрии детали основания для последующего зеркального отражения двух рычагов и далее – получить эти зеркальные детали. Этой последовательности действий соответствуют рисунки 3.99-3.100.
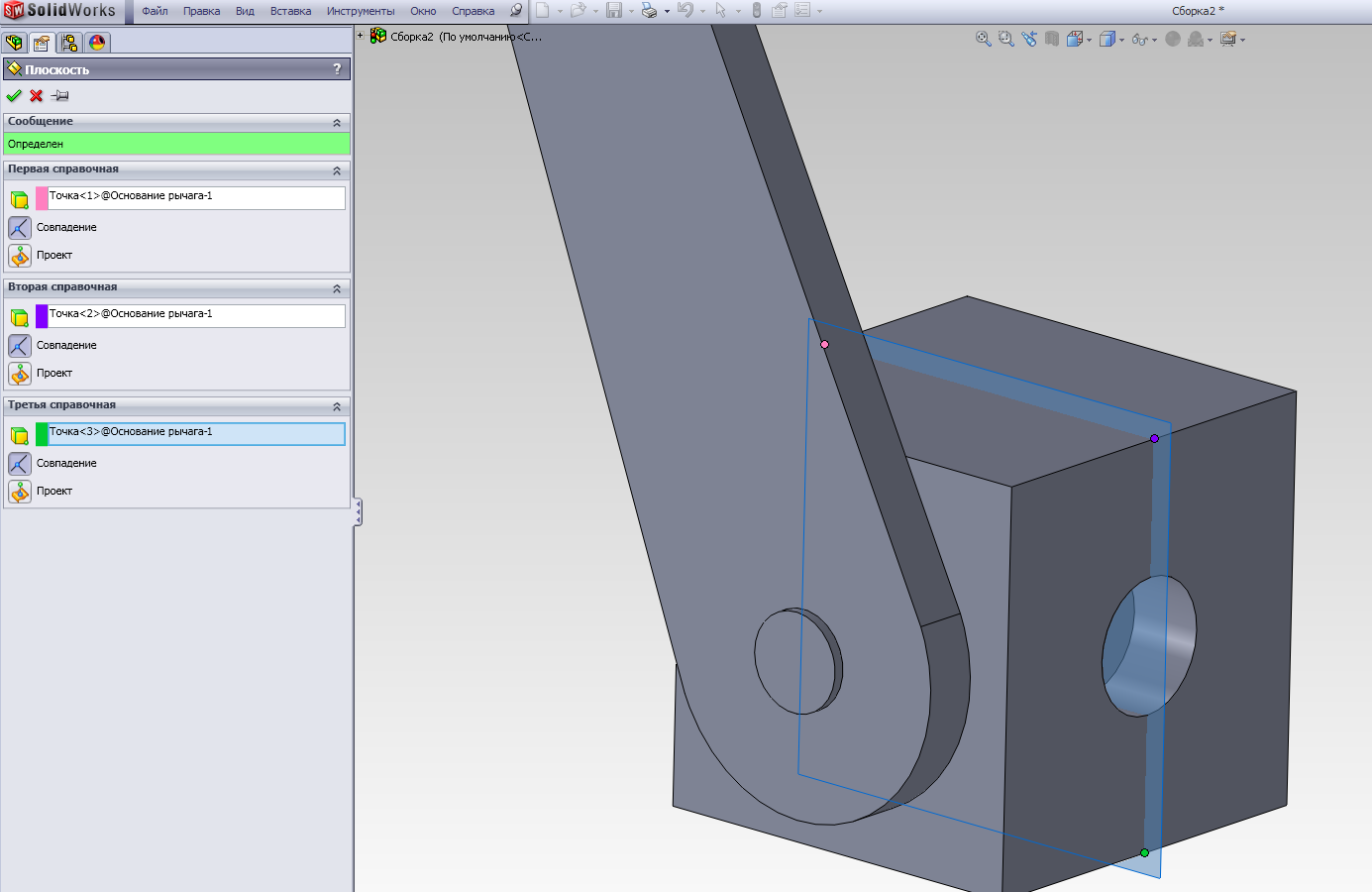
Рис.3.99
а)
б)
в)
Рис.3.100
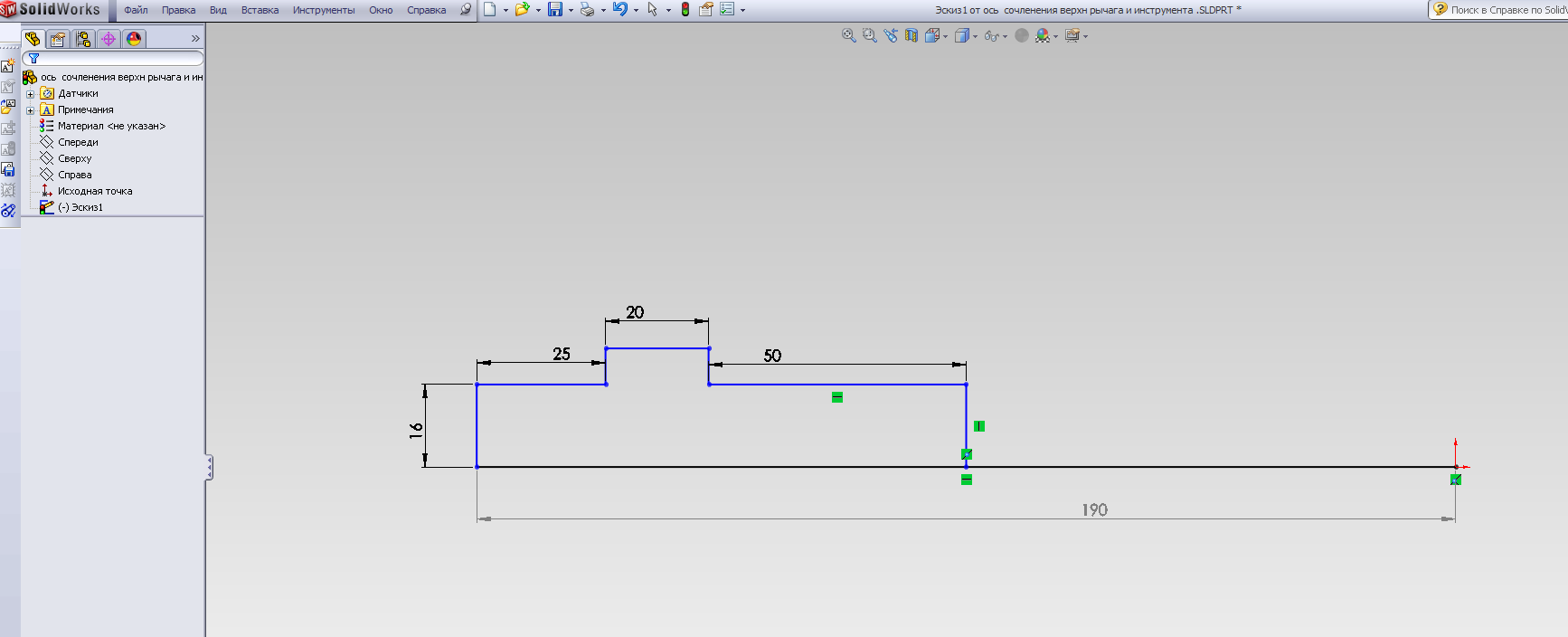
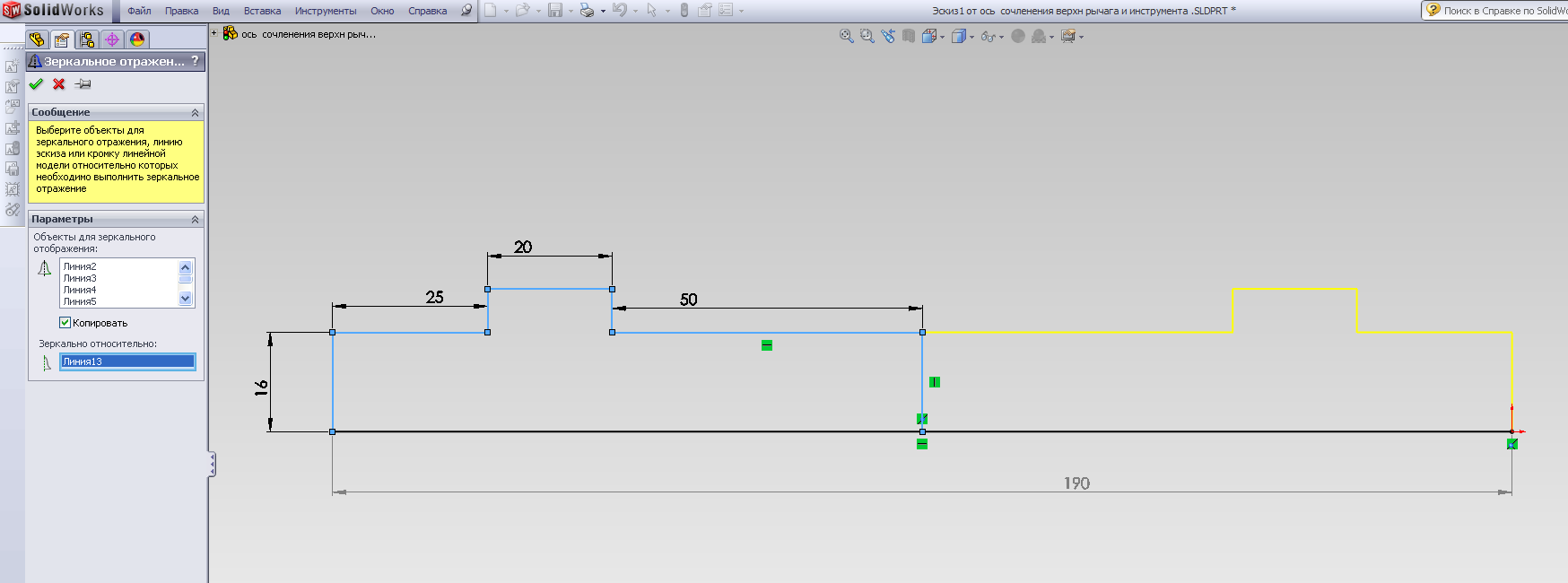
66. Теперь делаем еще одну ось с ограничительными выступами, препятствующими смещению верхних рычагов в сборке вдоль направления осиx; параметры этой оси:R14=16, d16=240-2*25=190. Соответствующая последовательность действий показана на рисунке 3.101.
а)
б)

в)
Рис.3.101
67. Создадим в соответствие с рис.2.12 обобщенную деталь Инструмент (рис.3.102).
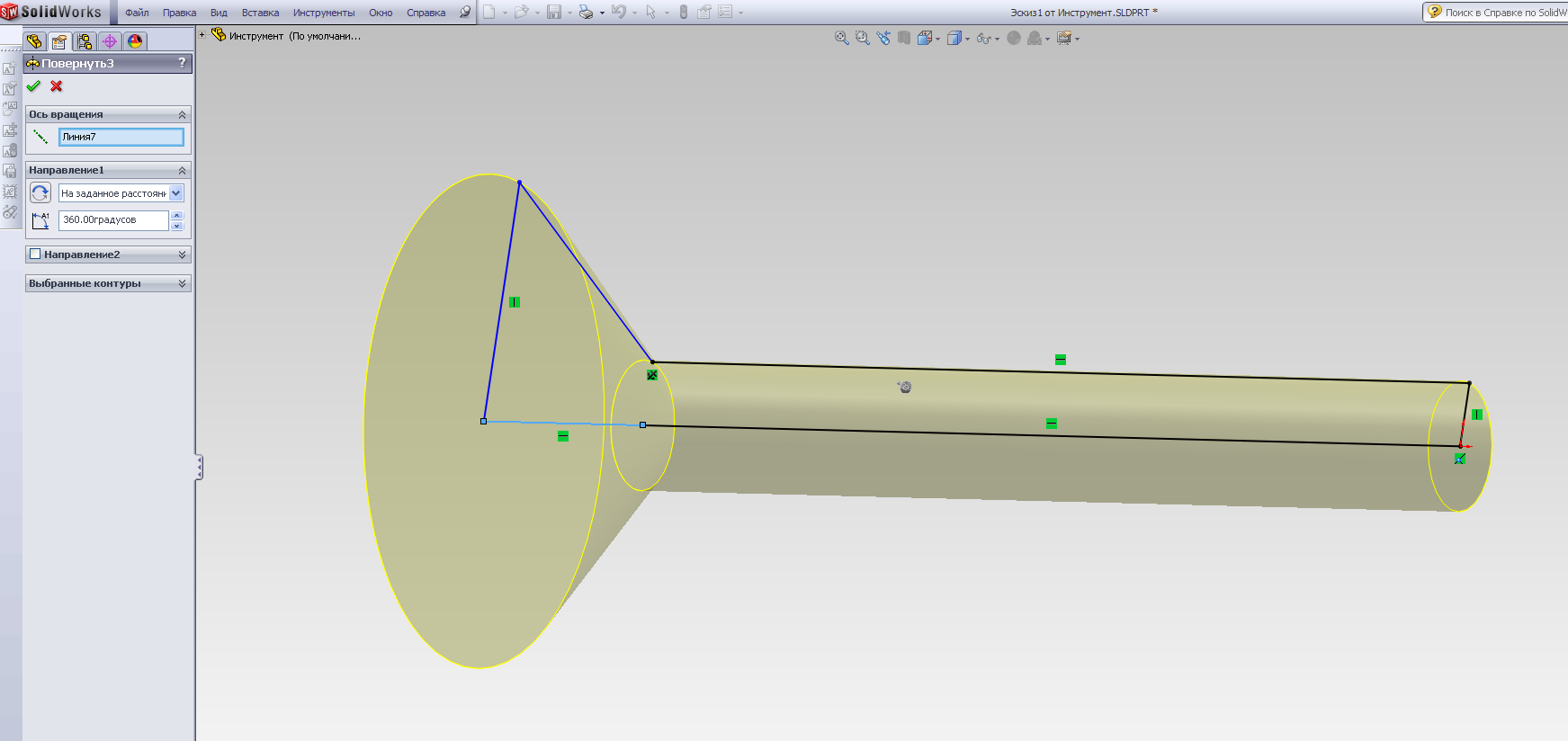
Рис.3.102
Необходимо сделать сборку деталиОсь 3 и детали Инструмент и совместить их соответствующим рисунку 2.12 образом.
68. Для этого вначале создаем ось вращения внутри самой детали Инструмент с помощью опции Вставка - Справочная геометрия–Ось. Далее, возвращаясь в сборку, вначале создаем плоскость симметрии детали Ось 3 – Плоскость 1,делаем сопряжение Совпадение между плоскостью симметрии Оси 3 и соответствующей оси вращения детали Инструмент (рис.3.103).
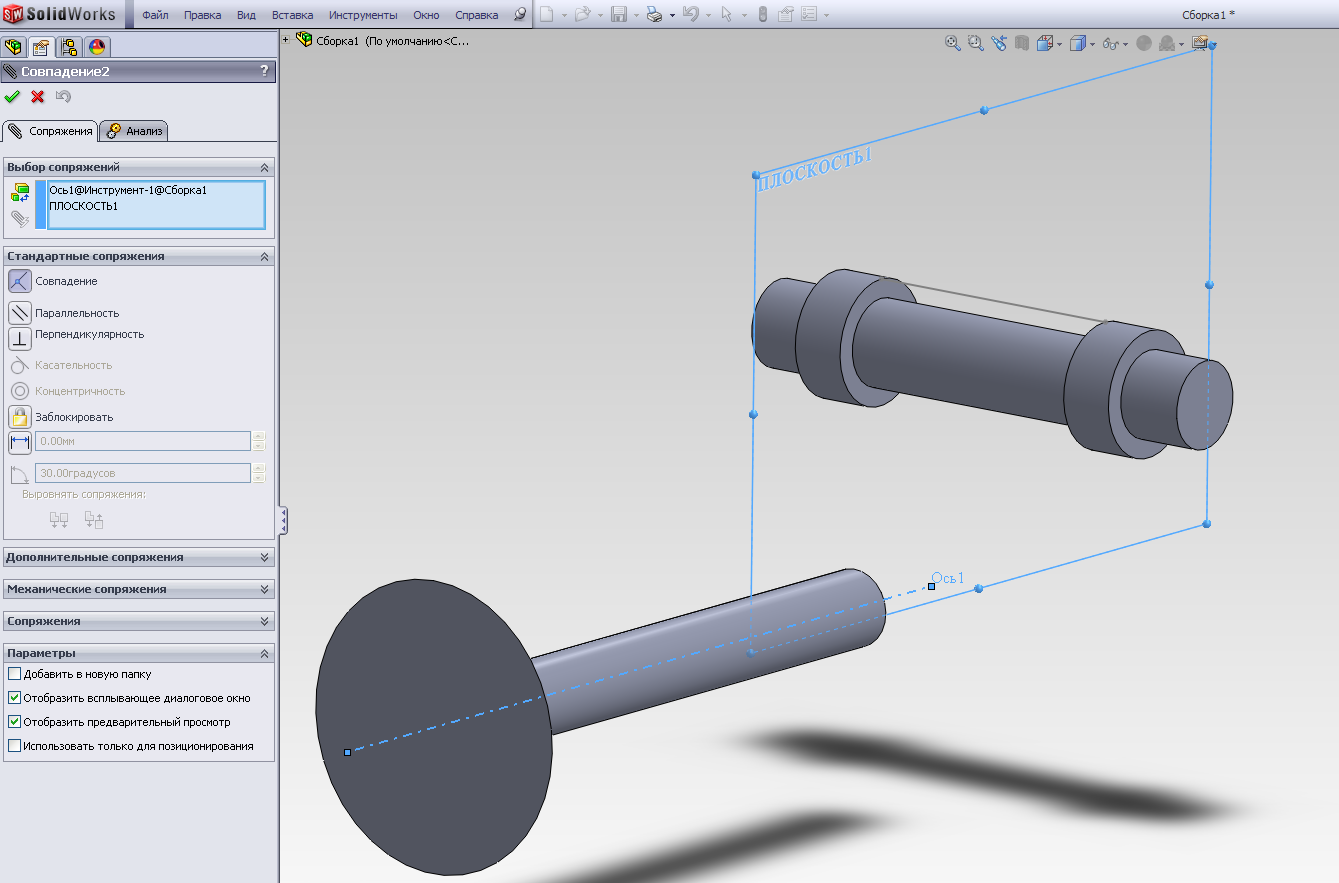
Рис.3.103
69. Делаем еще одно необходимое сопряжение – задаем совпадение оси вращения детали Инструментсо второй плоскостью симметрии(Плоскость 2, которая создается по аналогии с Плоскостью 1) детали Ось 3(рис.3.104).
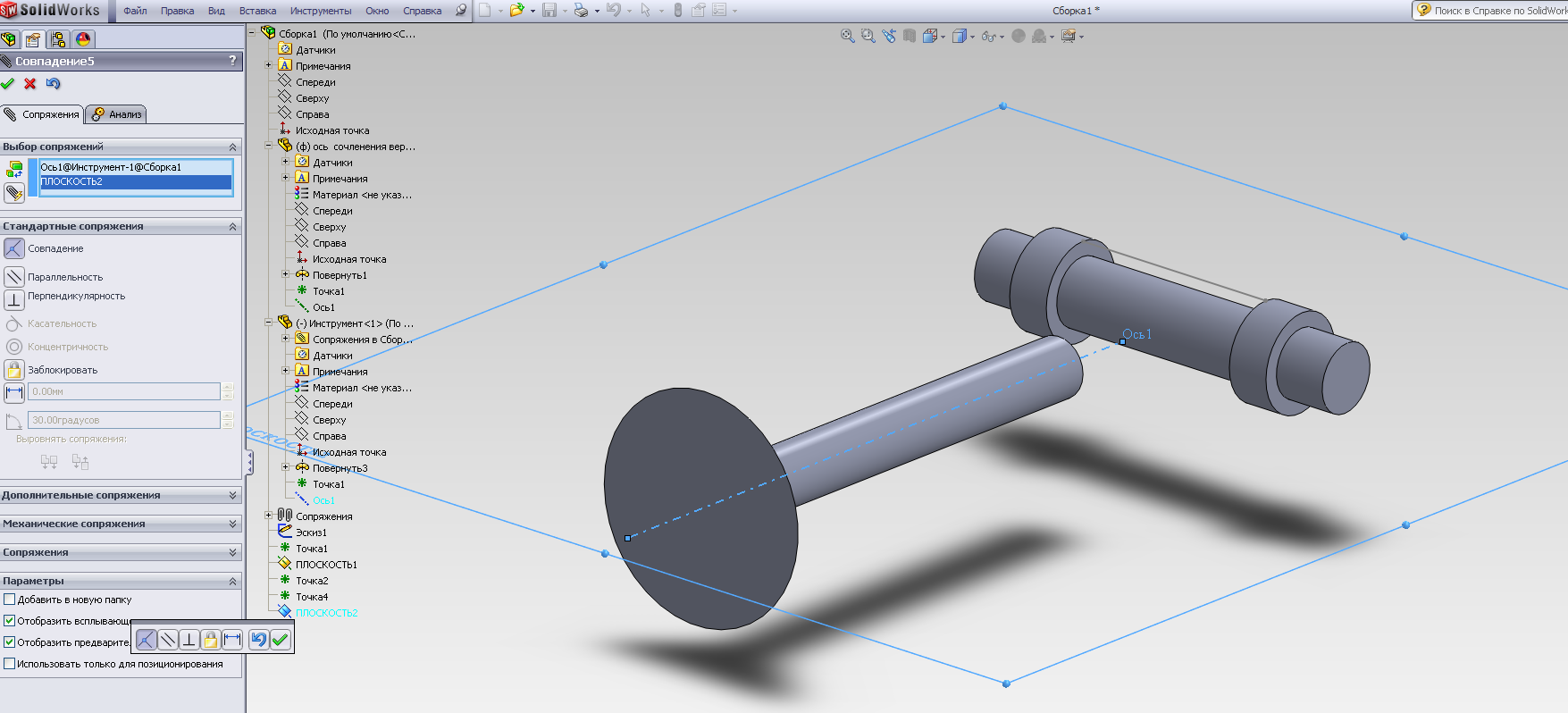
Рис.3.104
70. Теперь перемещаем деталь Инструмент вдоль прямой, соответствующей единственной оставшейся степени свободы этой детали, до пересечения с Осью 3(рис.3.105).
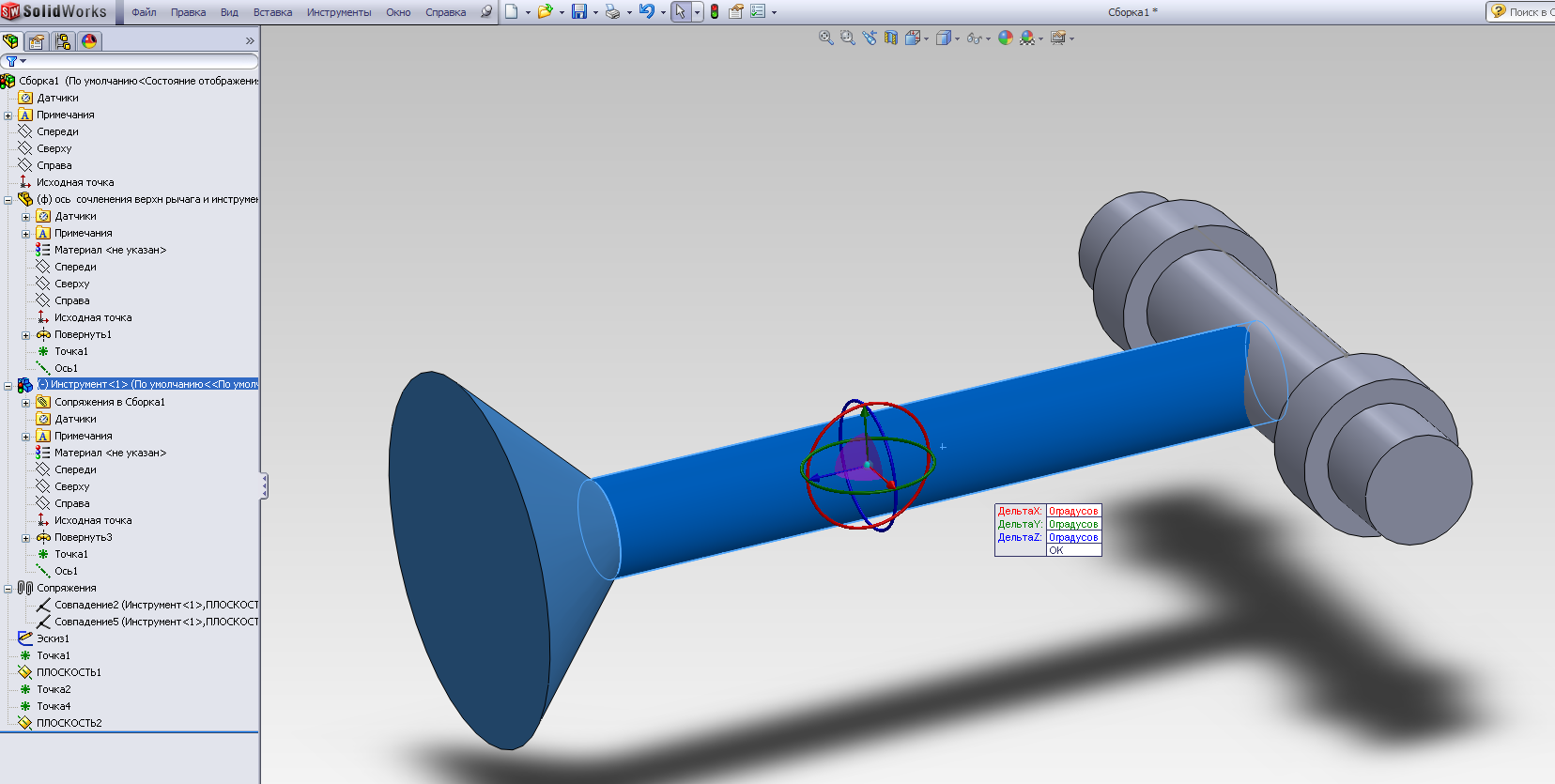
Рис.3.105
Теперь необходимо скомбинировать два твердых тела в сборке – Ось 3 и Инструмент и затем получить единое твердое тело.
71. Сохраним сборку (Сборка 2) в формате детали PartиназваниемИнструмент с осью 3, выбрав дополнительную опциюВсе компоненты(рис. 3.106).
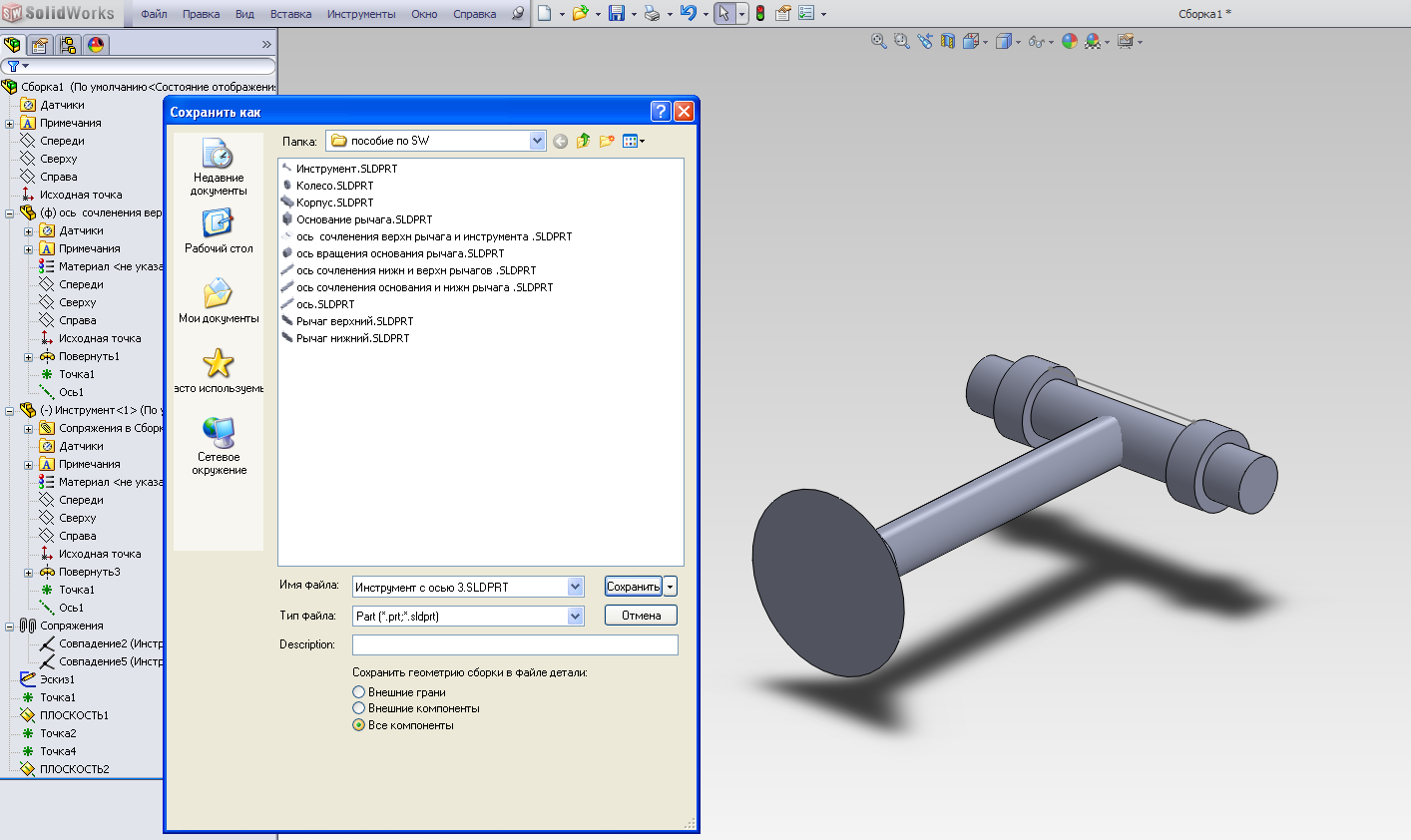
Рис.3.106
72. Открываем файл Инструмент с осью 3. Затем проводим операцию комбинирования двух твердых тел согласно последовательности Вставка – Элементы – Скомбинировать тела(рис.107а), выбрав в дереве конструирования (после появления окна редактированияСоединить 1) детали Ось 3 и Инструмент(рис.107 б).
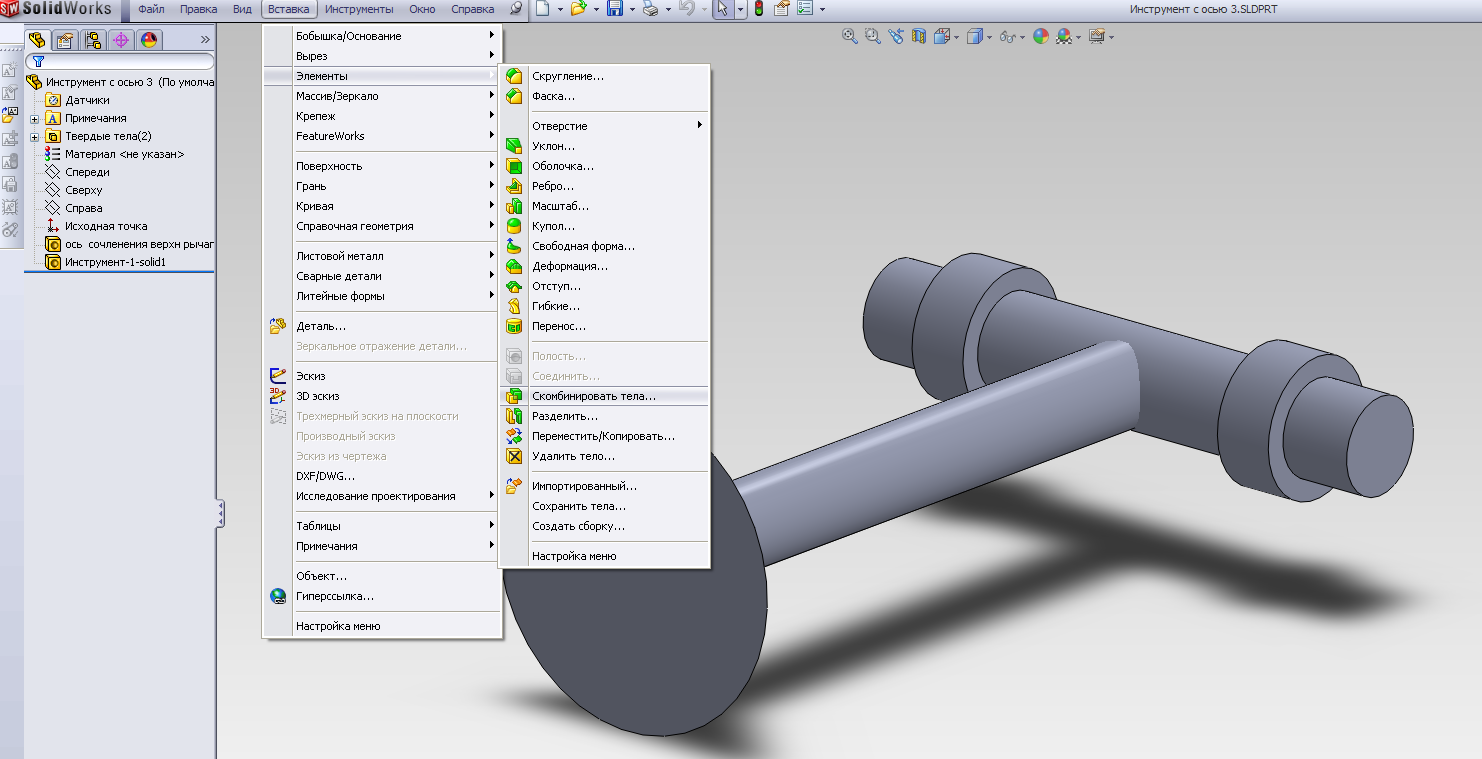
а)
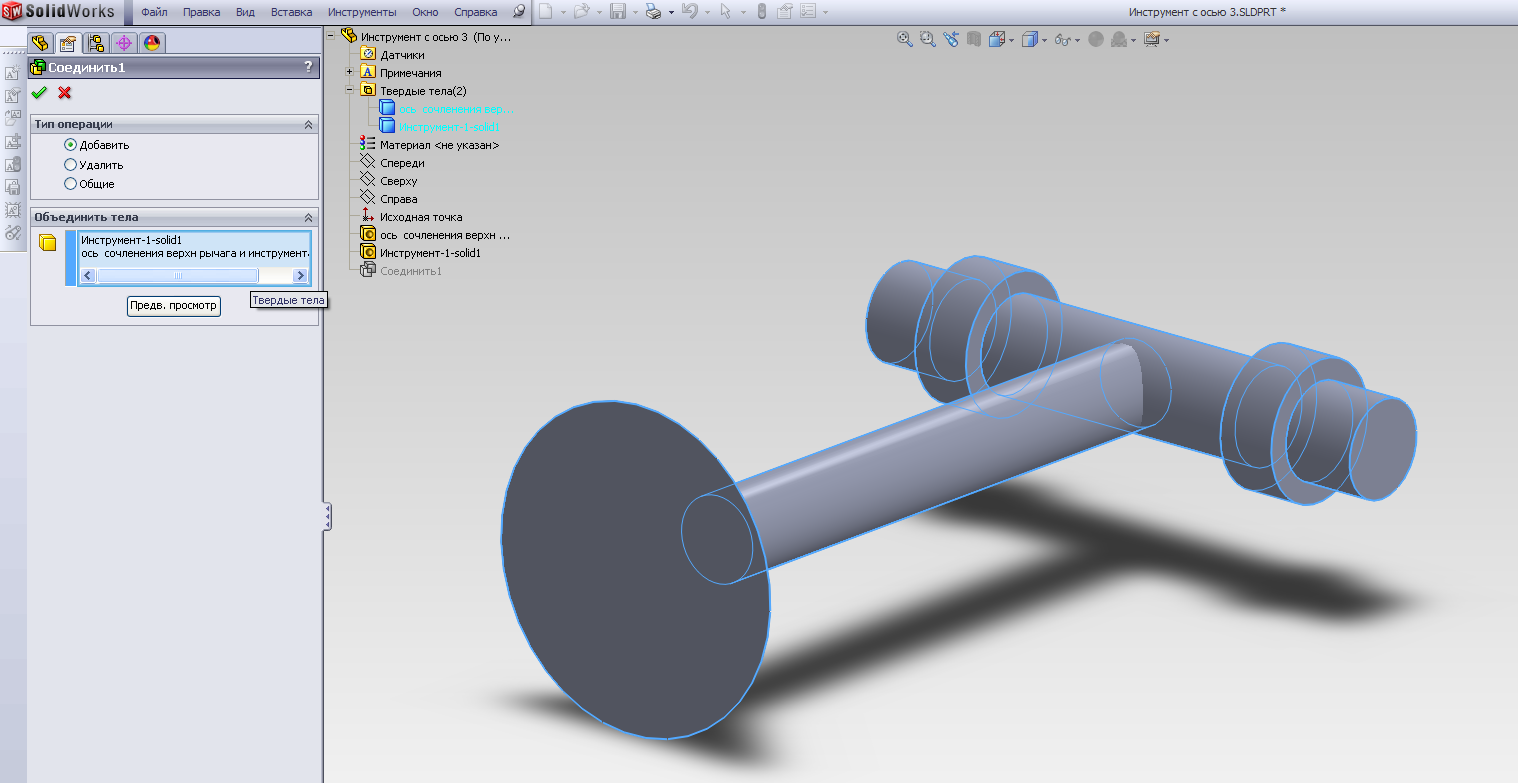
б)
Рис.3.107
73. Для создания единого твердого тела из скомбинированных твердых тел необходимо сделать операцию сшивки: последовательностью Вставка – Поверхность – Сшить поверхность вызываем окно редактирования операции сшивки (рис.3.108). Далее необходимо вручную выделить все грани (рис.3.108 б), входящие как в первую, так и во вторую детали полученной скомбинированной детали (рис.3.108 а), выбрать опцию Попытаться создать твердотельный элемент(рис.3.108 в), и далее - ОК(Сшить поверхность).
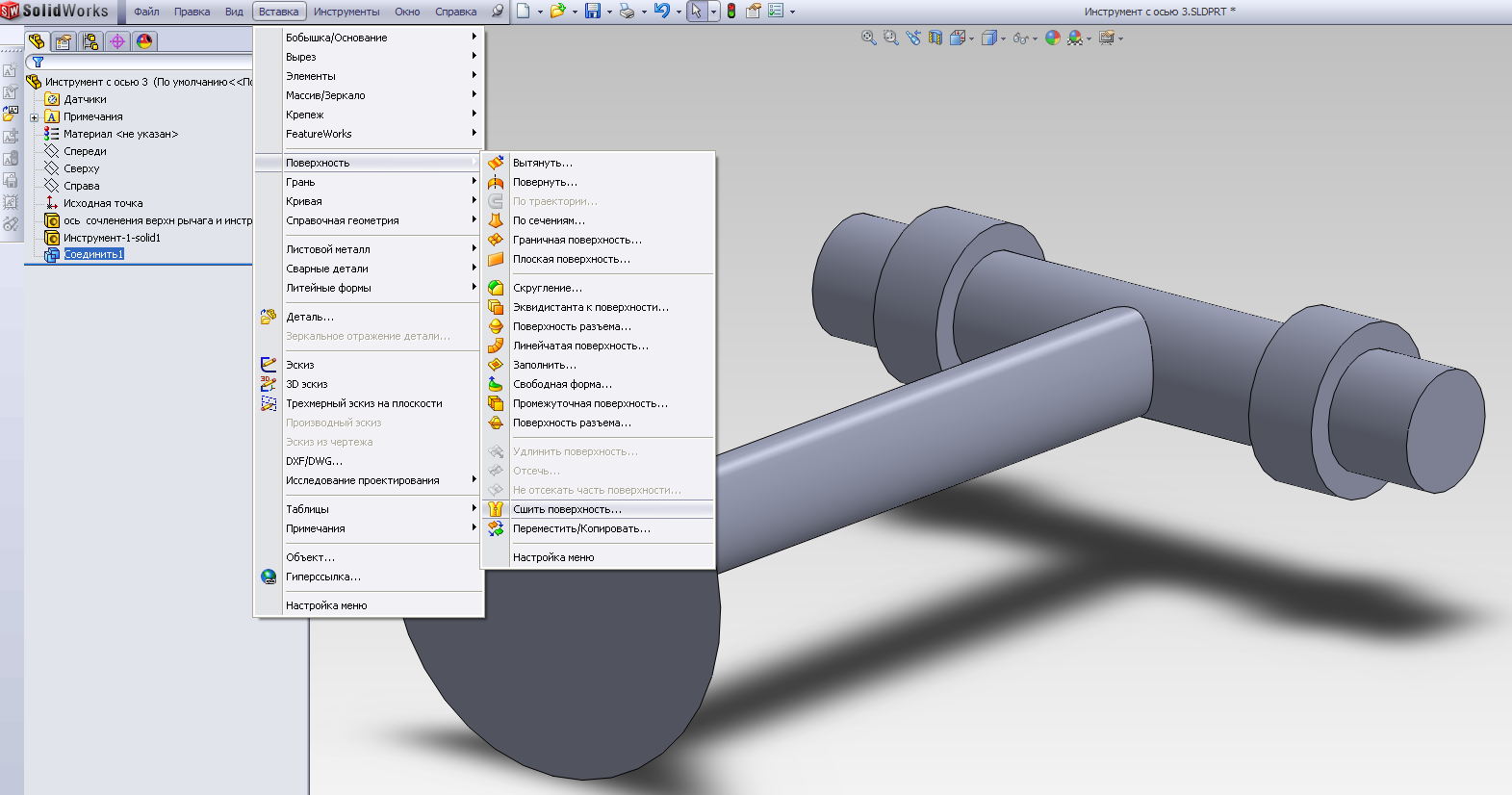
а)
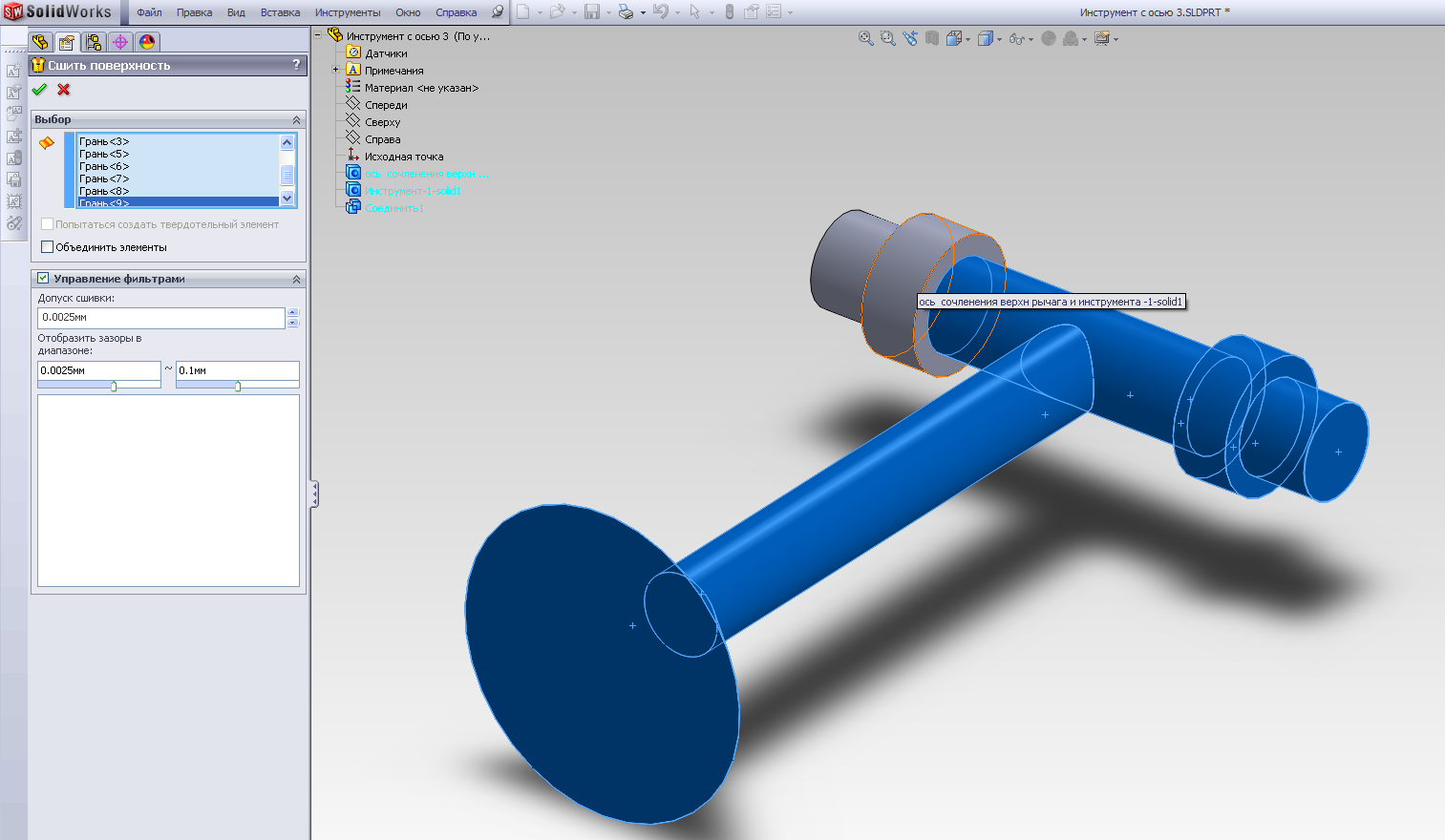
б)
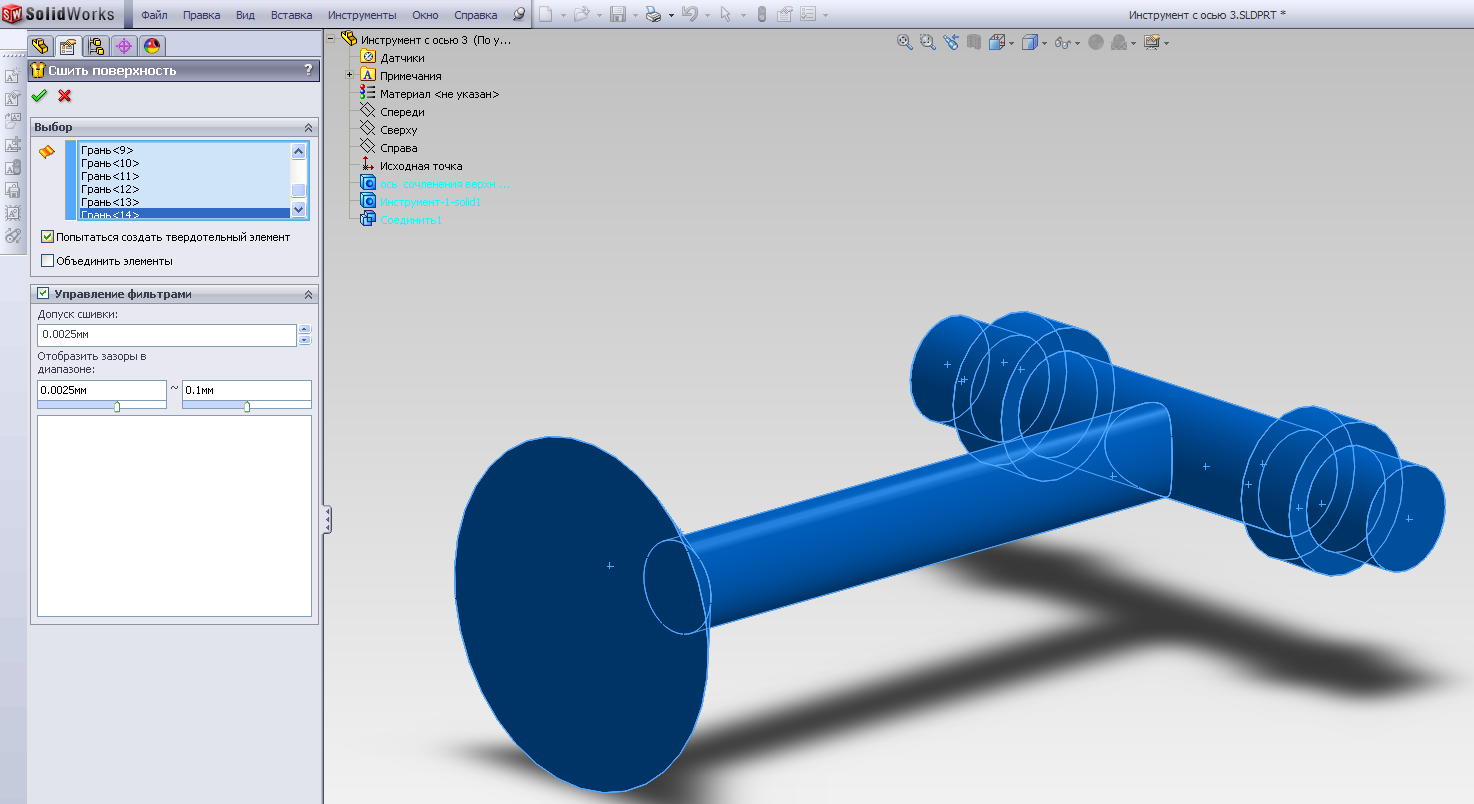
в)
Рис.3.108
74. После сшивки, поскольку она привела к созданию твердотельного элемента, в дереве конструирования отобразится название этого нового элемента Поверхность-Сшить; а скомбинированный твердотельный элемент из дерева конструирования теперь можно удалить (рис. 3.109-3.110).
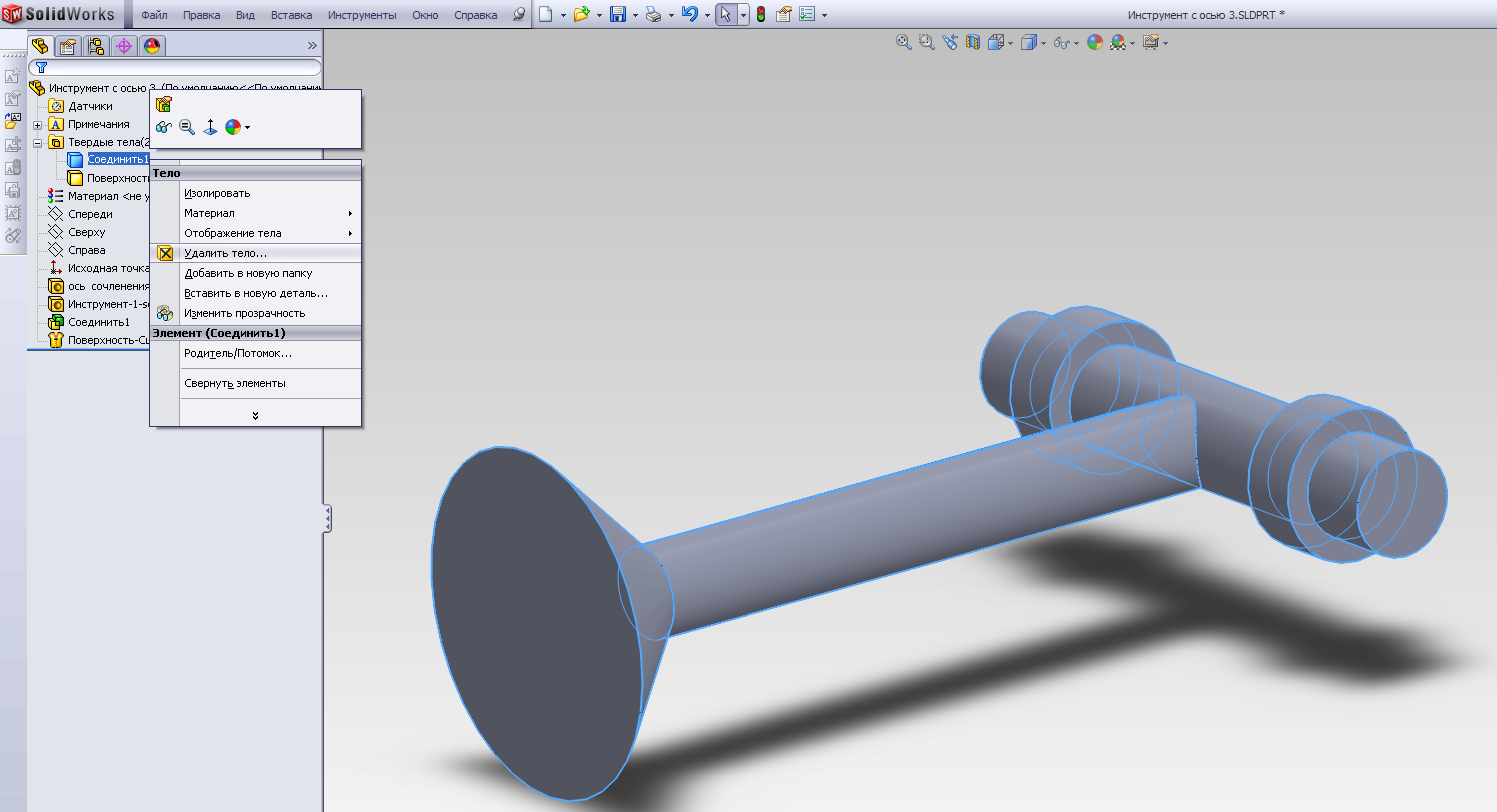
Рис.3.109
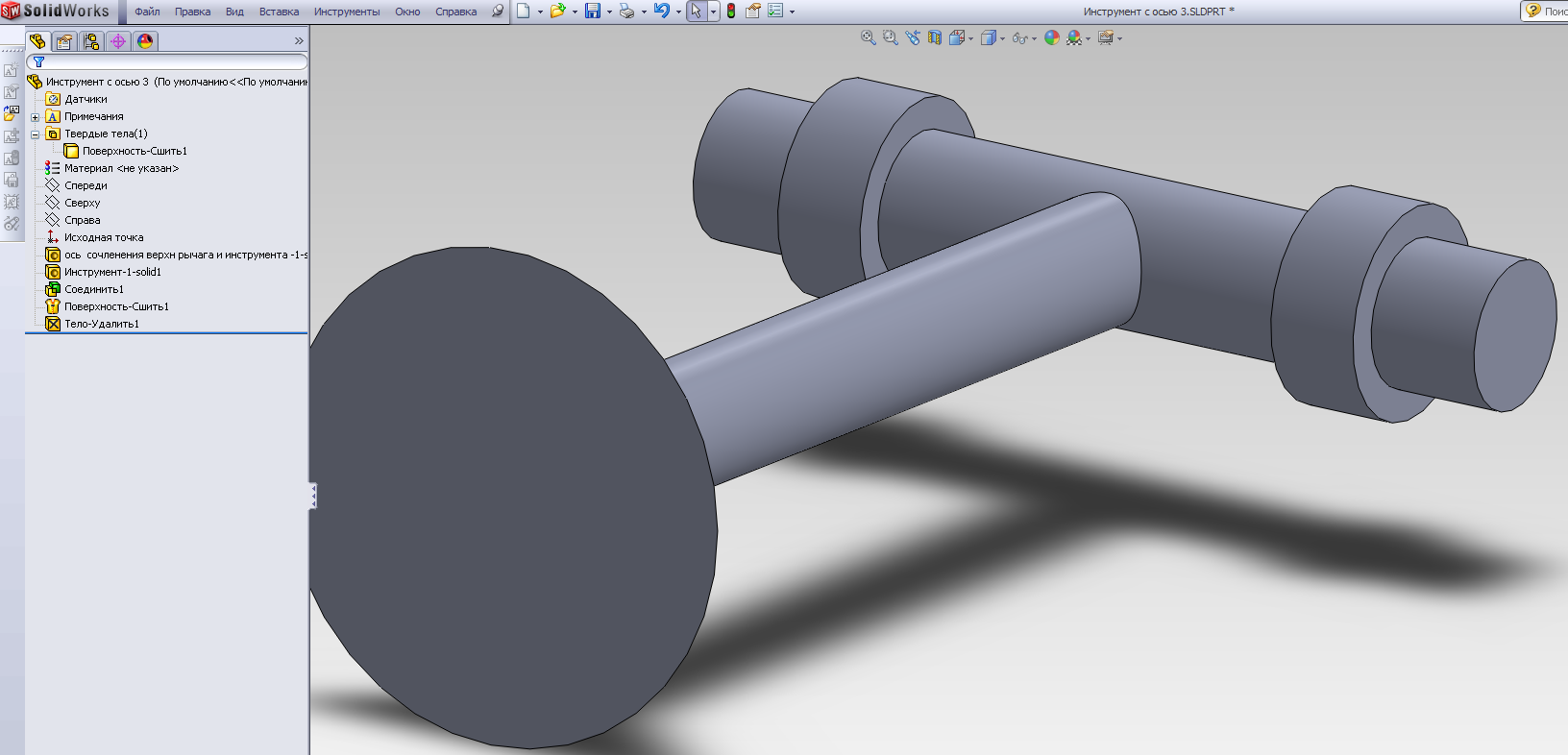
Рис.3.110
75. Теперь открываем вновь Сборку 2, переименовываем её вРычагов систему и добавляем в неё только что созданнуюдеталь Инструмент с осью 3. Затем для увязывания двух верхних рычагов в этой сборке с только что вставленной деталью (согласно видам на рисунке 2.14)делаем сопряжение типа Совпадение между соответствующими кромками одного из двух верхних рычагов и детали Инструмент с осью 3 (рис.3.111 б). Тем самым взаимная ориентация центров тяжестей обеих фигур будет жестко зафиксирована, и для детали инструмента останется только одна вращательная степень свободы (рис.3.111 б).

а)
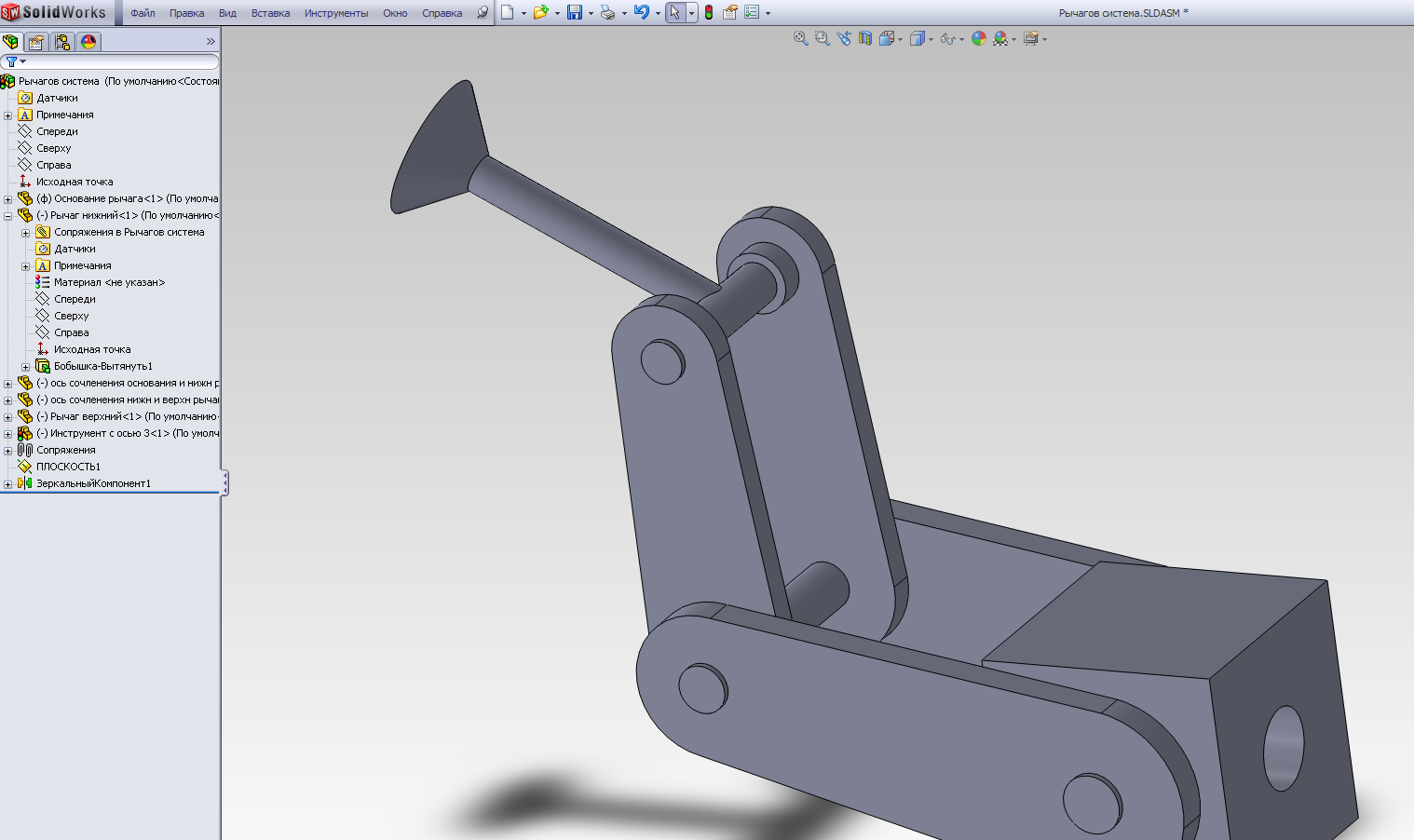
б)
Рис.3.111
Теперь необходимо сделать сборку, состоящую из Сборки 1и сборки Рычагов система– сборку второго порядка.
76. Для этого открываем сборку Сборка 1, переименовав её предварительно в Тележку, и во вкладке Файл выбираемСоздать сборку из сборки(3.112).
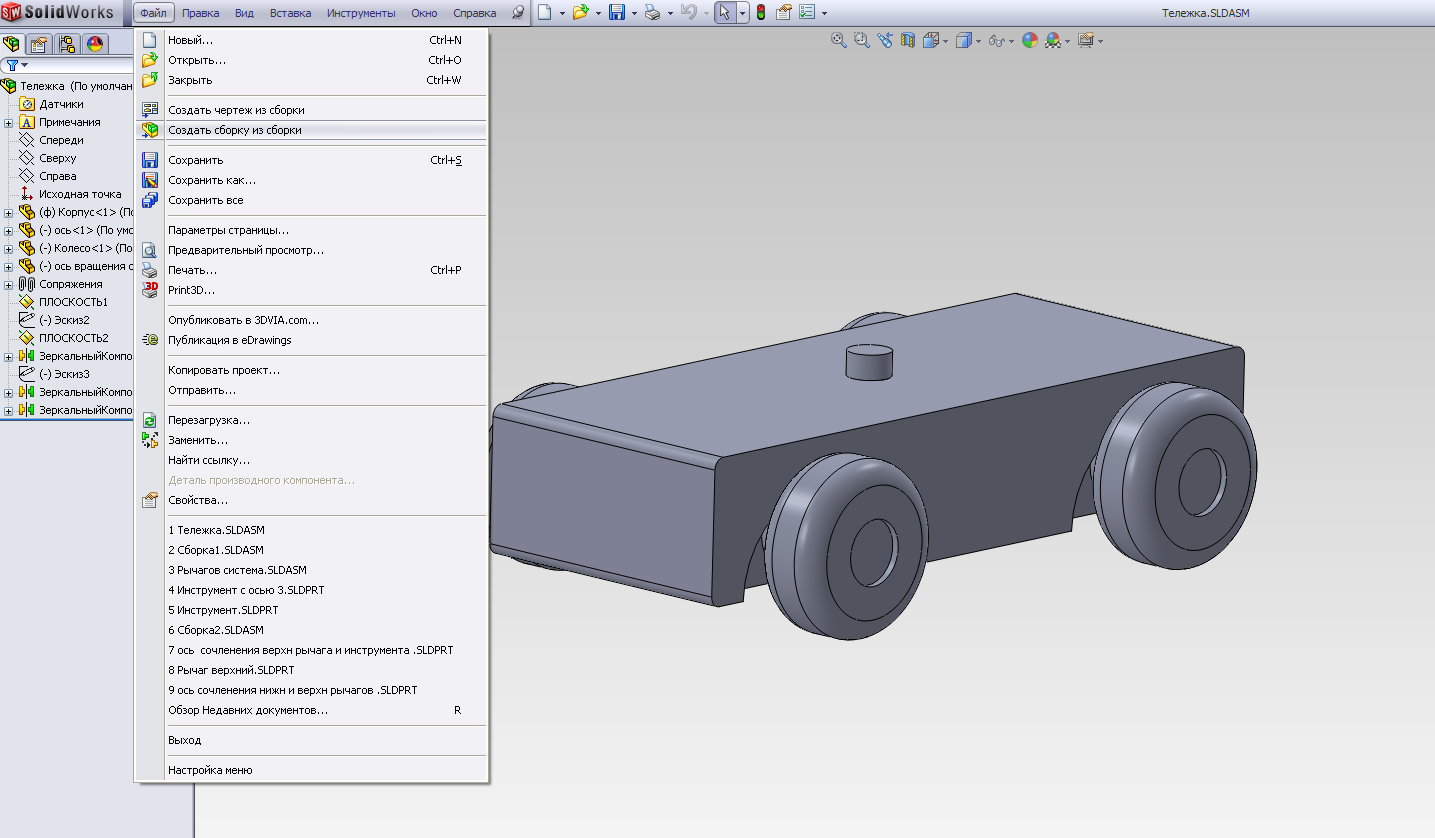
Рис.3.112
77. Теперь, также как и в случае обычной сборки деталей – используя последовательность:Вставка – Компонент - Из файла, добавляем в созданную сборку второго порядка уже имеющуюся сборку Рычагов система(рис.3.113):
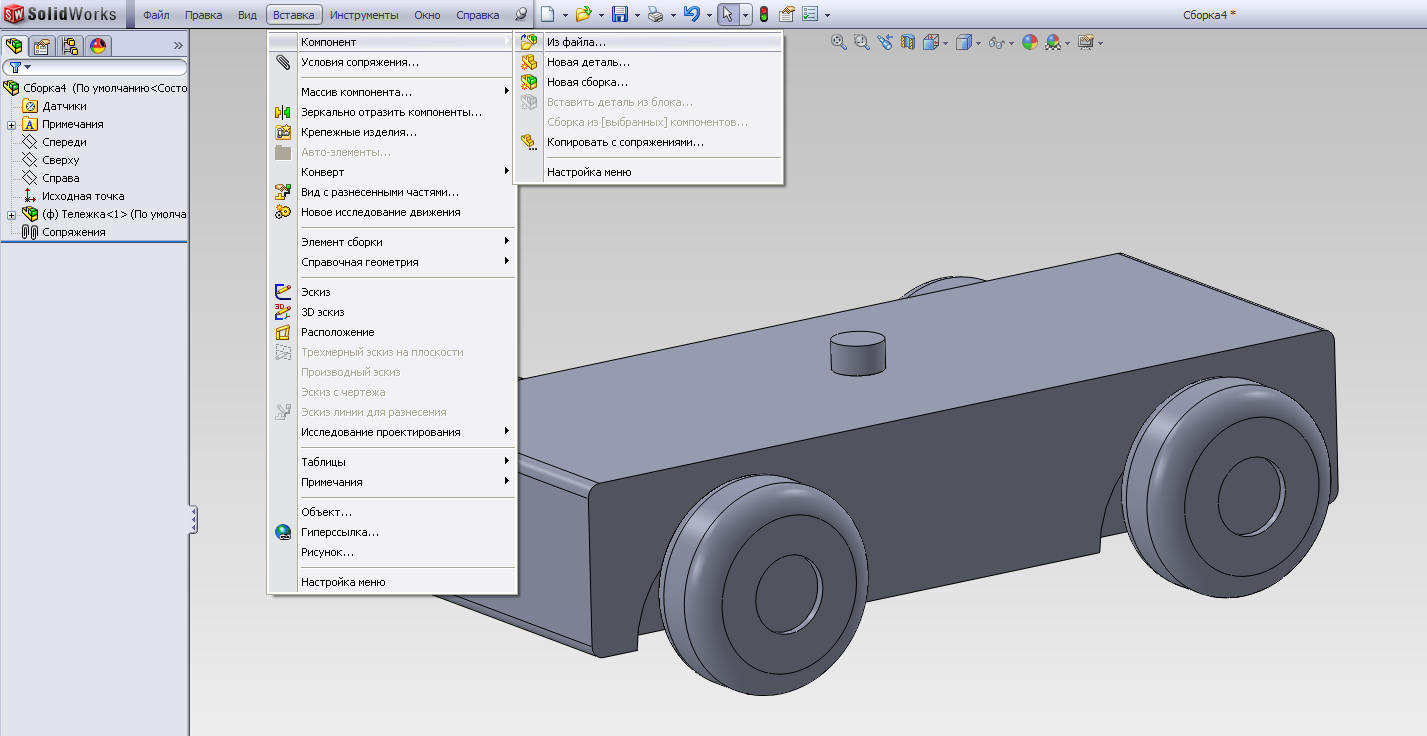
Рис.3.113
78. Делаем сопряжение типа Концентричность между соответствующими кромками детали Ось вращения основания (которая уже присутствовала в сборке Тележка до вставки сборки Рычагов система) и детали Основание рычага сборки Рычагов система (рис.3.114).
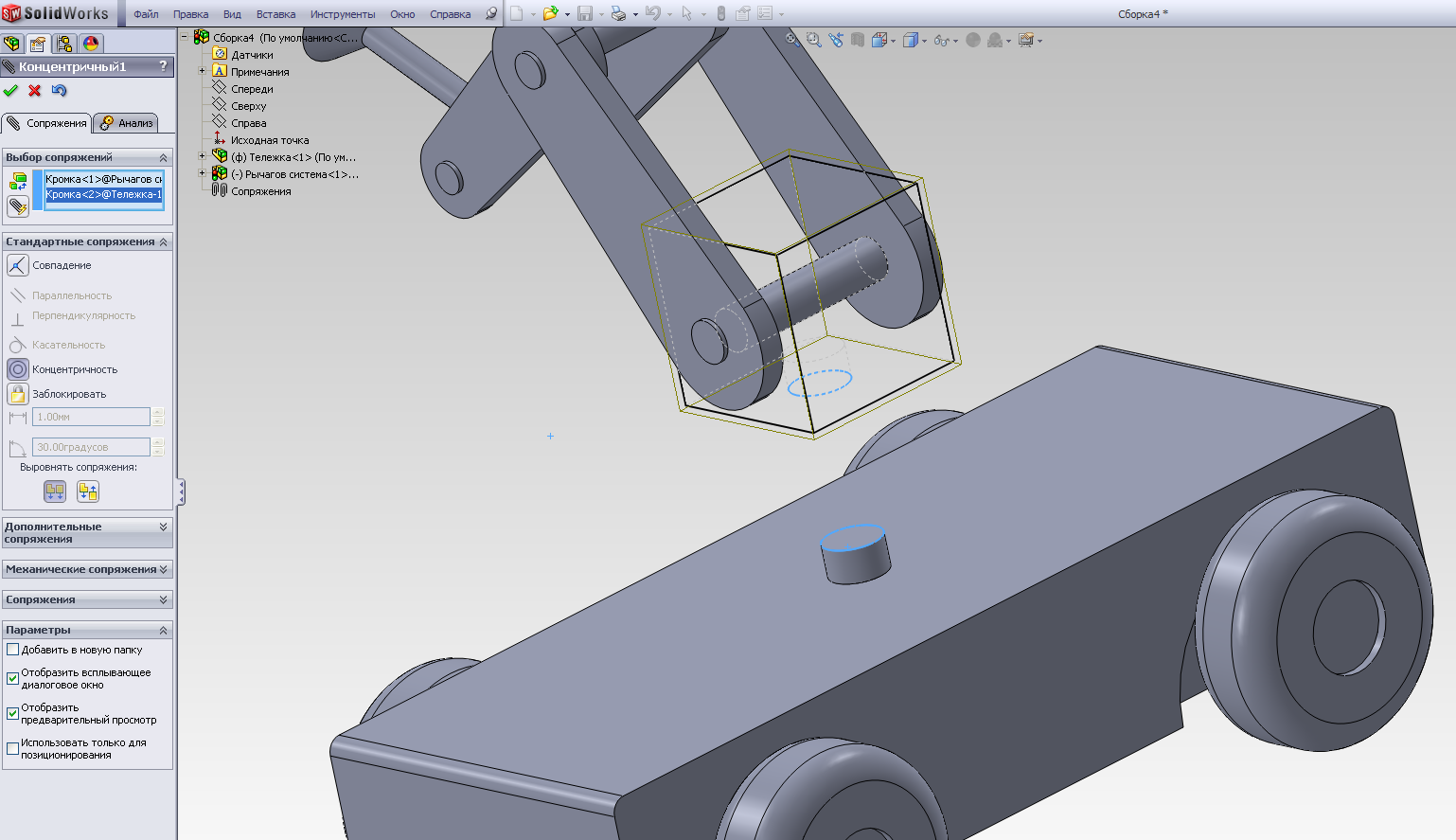
Рис.3.114
79. Для полного сопряжения двух сборок (входящих как сборки первого порядка в сборку второго порядка), определяемого рис.2.16, делаем сопряжение типа Совпадение между теми соответственными гранями деталей Основание рычага (сборки Рычагов система) и Корпус (сборки Тележка), которые должны касаться друг друга (рис.3.115).
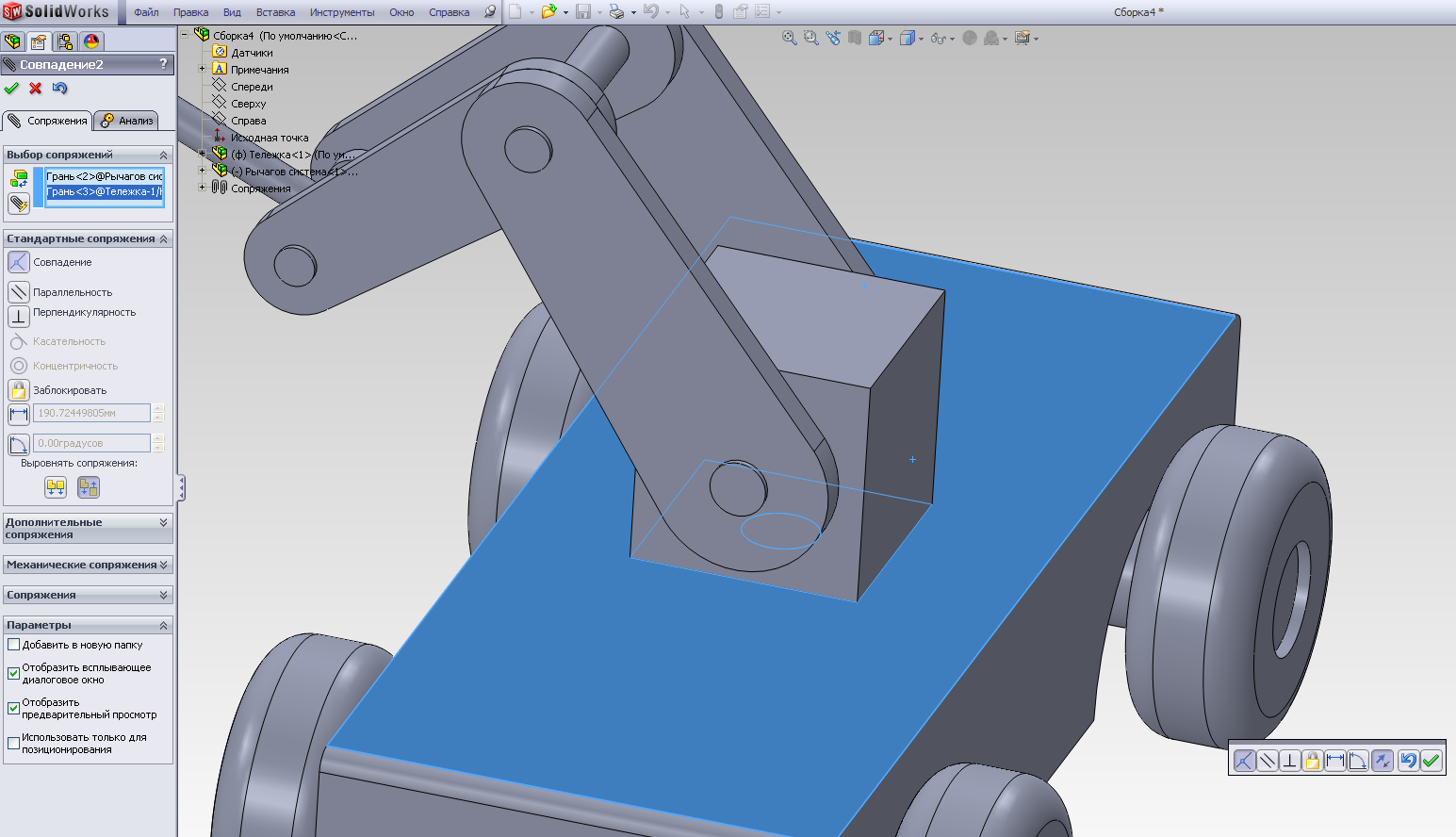
Рис.3.115
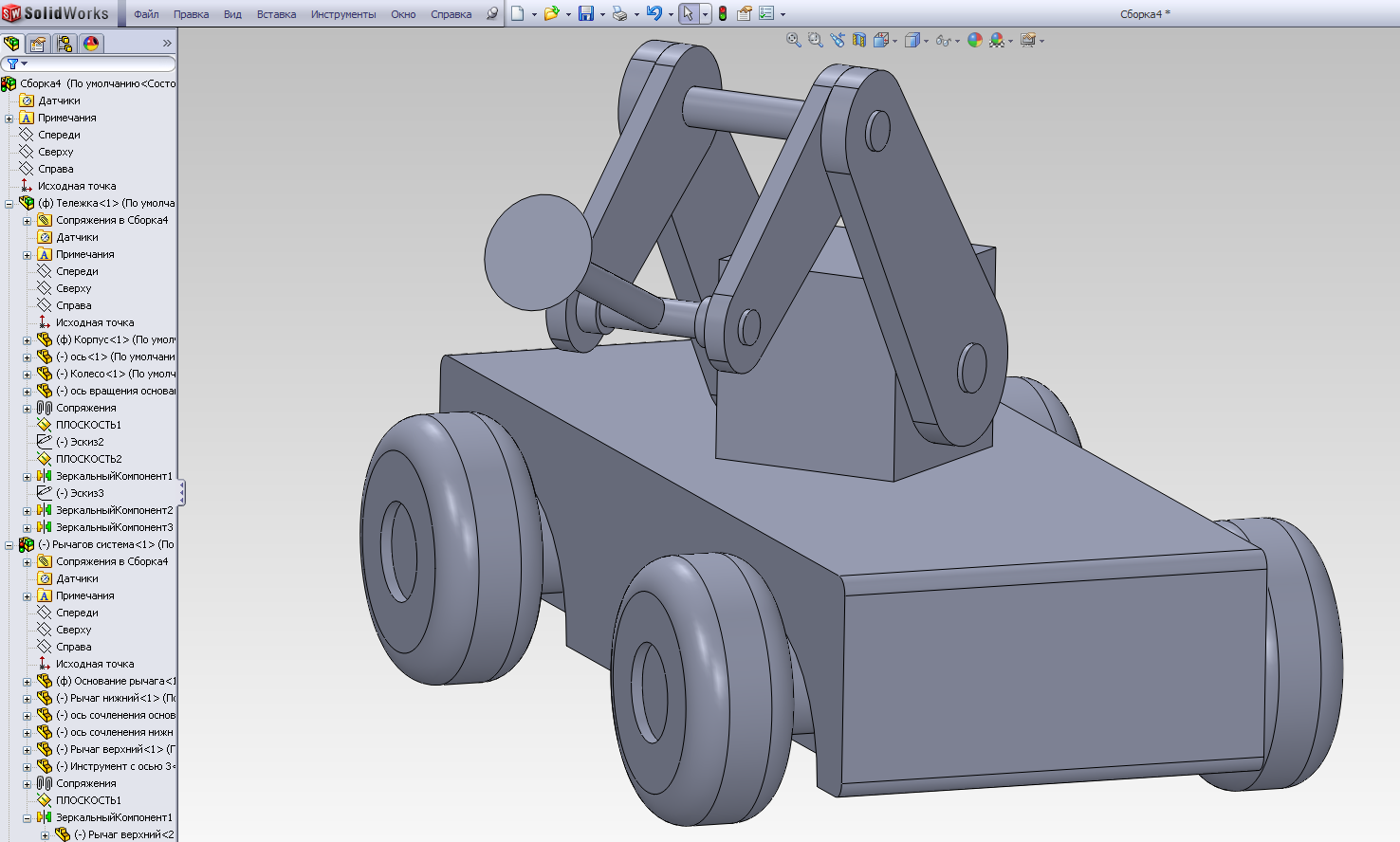
Рис.3.116
В результате окончательно получаем полную сборку, которую требовалось создать согласно техническому заданию (рис.3.116).