

3. Боковая аэродинамическая сила. Коэффициент боковой аэродинамической силы. Угол скольжения.
Боковая сила возникает в результате воздействия потока на боковую поверхность фюзеляжа и вертикальное оперение при движении самолета.
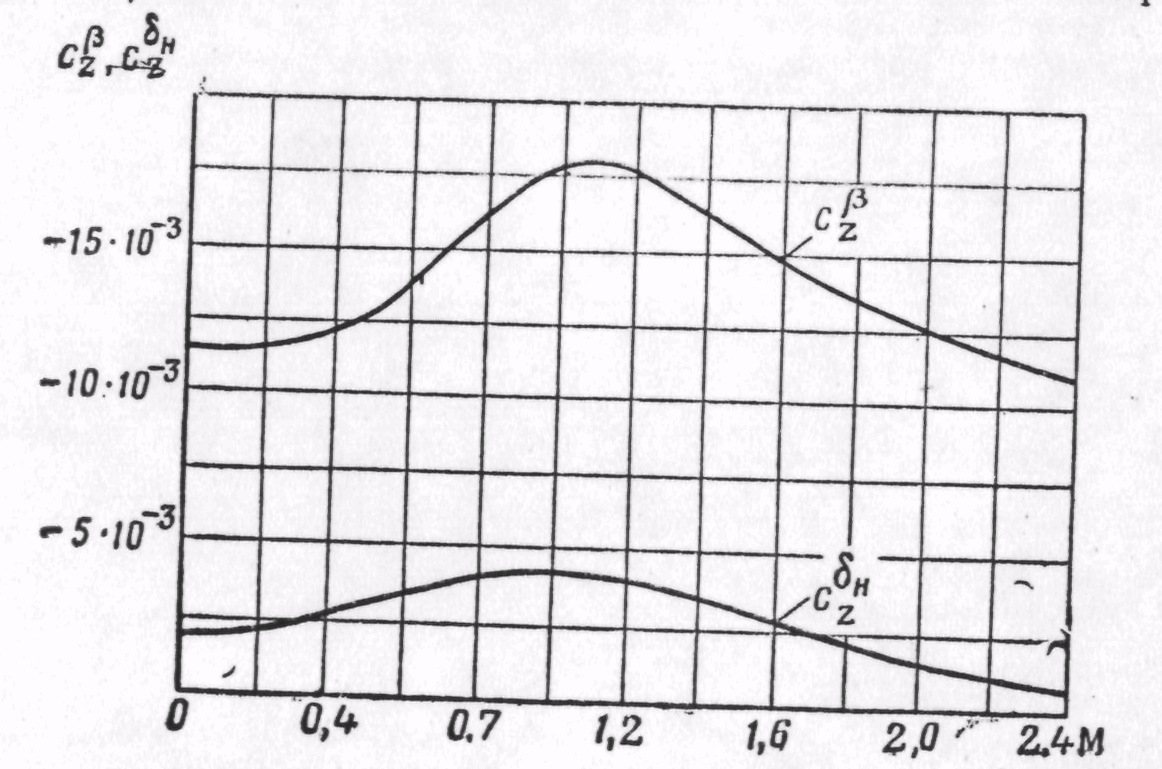
Рис.
19. Зависимость коэффициентов
![]() и
и
![]() от числа М
от числа М
Эта
сила возникает при скольжении самолета
и отклонении руля направления.
Коэффициент боковой силы
![]() зависит
от угла скольжения
зависит
от угла скольжения
![]() и угла отклонения руля направления
и угла отклонения руля направления
![]() .
Угол скольжения
—
это угол между вектором скорости и
плоскостью симметрии самолета.
.
Угол скольжения
—
это угол между вектором скорости и
плоскостью симметрии самолета.
В первом приближении коэффициент боковой силы определяется выражением:
![]() (16)
(16)
Коэффициенты
и
— частные производные
по углу скольжения
и углу отклонения руля направления
![]() —
всегда отрицательны и изменяются в
зависимости от числа М полета (рис. 19).
—
всегда отрицательны и изменяются в
зависимости от числа М полета (рис. 19).
Коэффициент
боковой силы
является
функцией двух переменных, или аргументов,
и
Частной производной функции нескольких
аргументов называется производная по
одному из аргументов
![]() предположении,
что другие аргументы остаются постоянными
(
= const).
предположении,
что другие аргументы остаются постоянными
(
= const).
Величина боковой силы определяется по формуле:
![]() (17)
(17)
ЛЕКЦИЯ 3. АЕРОДИНАМИЧЕСКИЕ МОМЕНТЫ И ИХ КОЭФФИЦИЕНТЫ
-
1.
Аэродинамические ЛА-центрические прямо-угольные системы координат.
2.
Схема моментов действующих на летательный аппарат в связанной системе координат.
3.
Система продольных моментов действующих на летательный аппарат в полете.
4.
Система поперечных моментов действующих на летательный аппарат в полете.
5.
Система боковых моментов действующих на летательный аппарат в полете.
1. Аэродинамические ла - центрические прямоугольные системы координат
Движение самолета описывается дифференциальными уравнениями, которые отражают характер изменения сил и моментов, действующих на самолет. Параметры движения самолета (скорость, высота, угловое положение) измеряются относительно определенных систем отсчета. Поэтому уравнения движения самолета могут быть составлены в некоторой определенной системе координат. Систему координат выбирают таким образом, чтобы записываемые в ней уравнения движения имели простой и удобный для моделирования вид. На практике применяются четыре прямоугольных системы координат: земная, связанная, скоростная, полусвязанная.
Земная
система координат
![]() (рис.
1) неподвижно связана с Землей. Начало
координат
(рис.
1) неподвижно связана с Землей. Начало
координат
![]() при моделировании полета самолета
обычно помещается в точке старта (начало
ВПП). Ось
при моделировании полета самолета
обычно помещается в точке старта (начало
ВПП). Ось
![]() направляется
вертикально вверх, ось
направляется
вертикально вверх, ось
![]() —
горизонтально в направлении на север.
—
горизонтально в направлении на север.
Ось
![]() направляется перпендикулярно плоскости
направляется перпендикулярно плоскости
![]() так,
чтобы система координат была правой.
так,
чтобы система координат была правой.
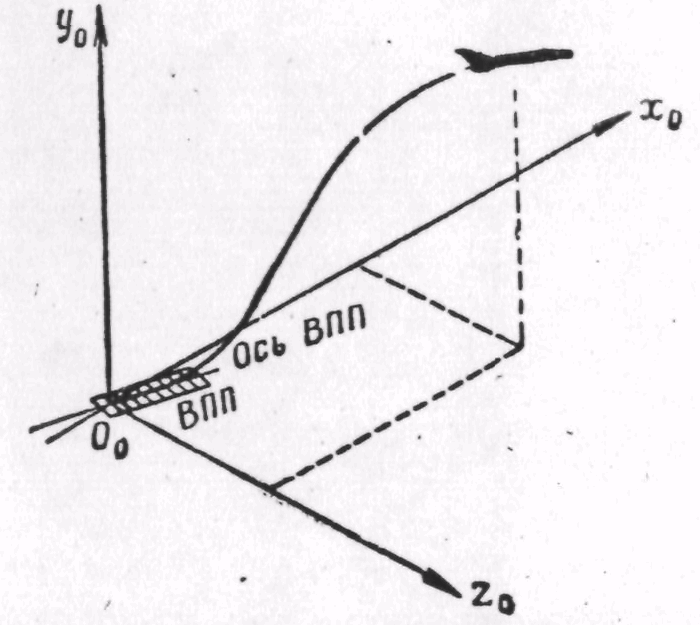
Рис. 1. Земная система координат
Связанная
система координат
![]() (рис.
2) жестко связана с самолетом. Оси
(рис.
2) жестко связана с самолетом. Оси
![]() и
и
![]() располагаются
в плоскости симметрии. Ось
направляется
вперед по продольной оси самолета,
а ось
совпадает
с нормальной осью, т. е. перпендикулярна
оси
.
Ось
располагаются
в плоскости симметрии. Ось
направляется
вперед по продольной оси самолета,
а ось
совпадает
с нормальной осью, т. е. перпендикулярна
оси
.
Ось
![]() перпендикулярна
плоскости симметрии
перпендикулярна
плоскости симметрии
![]() и
направлена в сторону правого крыла.
и
направлена в сторону правого крыла.
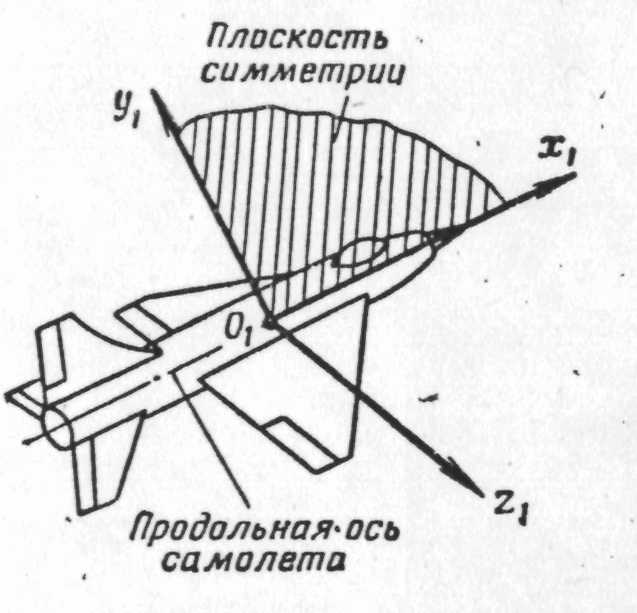
Рис. 2. Связанная система координат
Скоростная,
или
поточная,
система
координат
![]() (рис.
3) связана с вектором воздушной скорости
самолета V.
Ось
Ох
направлена
по вектору скорости V.
Оси Оу
и
(рис.
3) связана с вектором воздушной скорости
самолета V.
Ось
Ох
направлена
по вектору скорости V.
Оси Оу
и
![]() лежат
в плоскости, перпендикулярной вектору
скорости, ось Оу
располагается
в плоскости симметрии самолета, а
ось
направляется
в сторону правого крыла.
лежат
в плоскости, перпендикулярной вектору
скорости, ось Оу
располагается
в плоскости симметрии самолета, а
ось
направляется
в сторону правого крыла.
Полусвязанная
система
координат
![]() (рис.
4) отличается от скоростной тем, что ось
(рис.
4) отличается от скоростной тем, что ось
![]() направляется
по проекции вектора скорости V
на плоскость симметрии самолета. Ось
направляется
по проекции вектора скорости V
на плоскость симметрии самолета. Ось
![]() совпадает
со скоростной осью Оу,
а
ось
совпадает
со скоростной осью Оу,
а
ось
![]() — со связанной осью
— со связанной осью
![]()
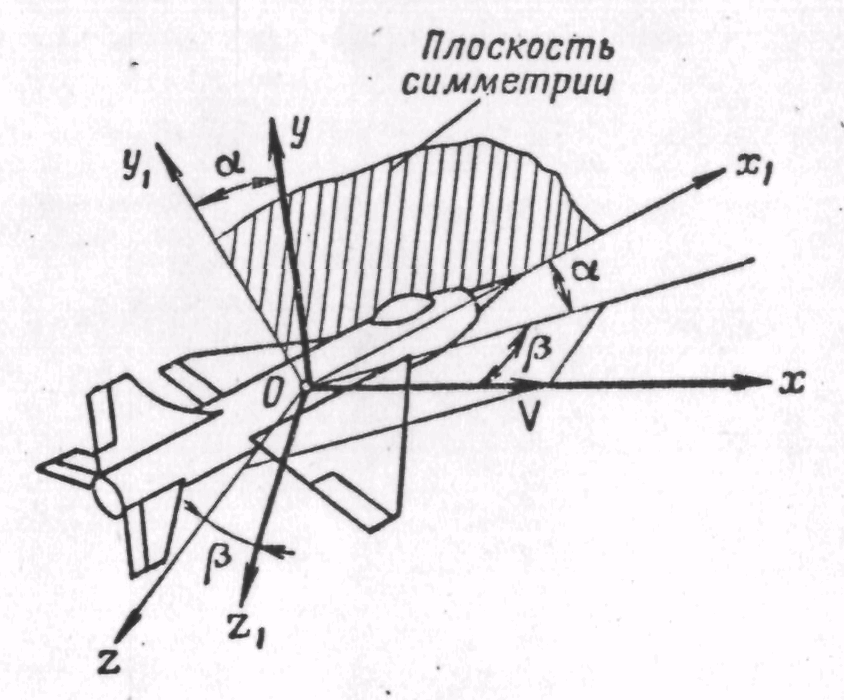
Рис. 3. Скоростная система координат
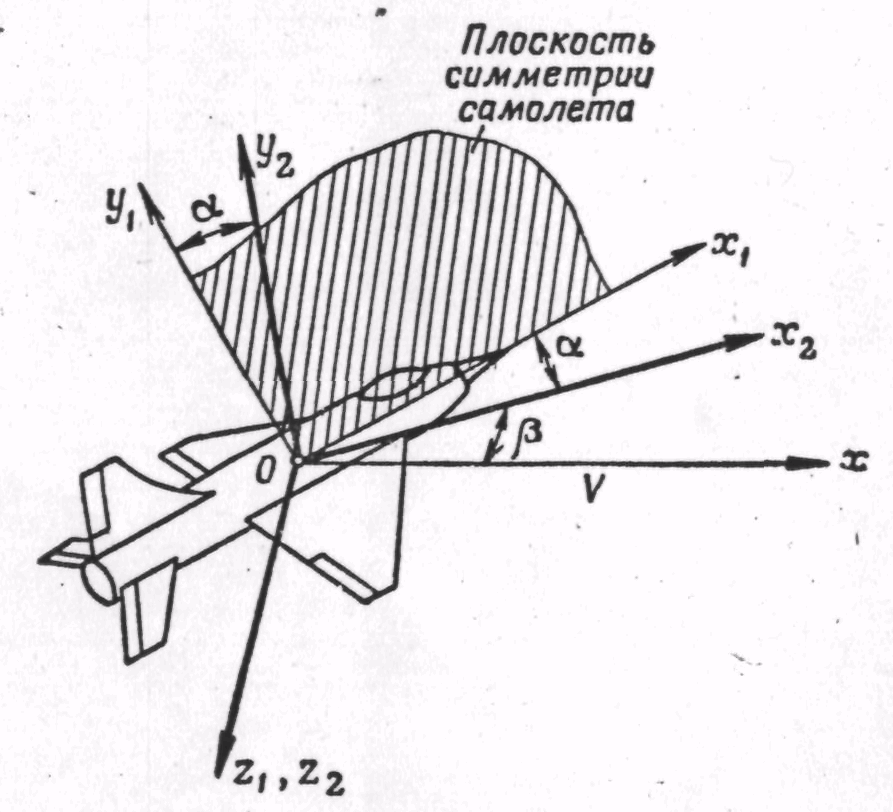
Рис. 4. Полусвязанная система
Положение летательного аппарата относительно земной системы координат определяется шестью координатами:
-
тремя координатами
![]() начала
координат связанной системы осей;
начала
координат связанной системы осей;
-
тремя углами
![]() между связанной и земной системами
координат.
между связанной и земной системами
координат.
Угол
крена
![]() (рис. 5) представляет собой угол, образуемый
плоскостью симметрии самолета с
вертикальной плоскостью, проходящей
через ось
(рис. 5) представляет собой угол, образуемый
плоскостью симметрии самолета с
вертикальной плоскостью, проходящей
через ось
![]() .
.
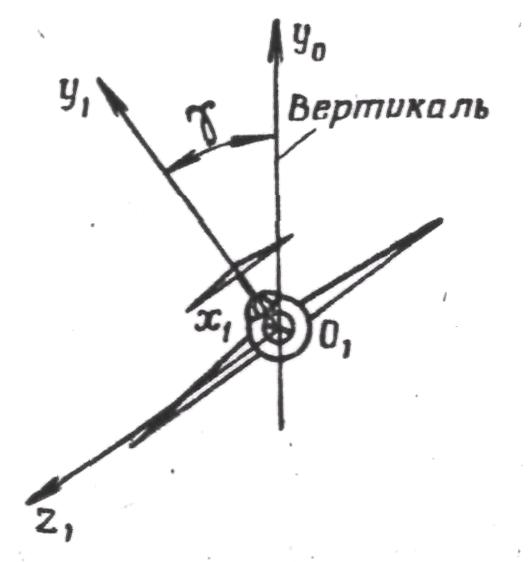
Рис. 5. Угол крена самолета
Угол
рыскания
![]() (рис. 6) — это угол между проекцией
продольной оси
(рис. 6) — это угол между проекцией
продольной оси
![]() на
горизонтальную плоскость и земной осью
.
на
горизонтальную плоскость и земной осью
.
Углом
тангажа
![]() (рис. 7) называется угол между продольной
осью
(рис. 7) называется угол между продольной
осью
![]() и
горизонтальной плоскостью.
и
горизонтальной плоскостью.
Центр тяжести самолета при полете перемещается по некоторой траектории. Вектор скорости полета в любой точке направлен по касательной к траектории. Положение вектора воздушной скорости V относительно самолета определяется углами атаки и скольжения .
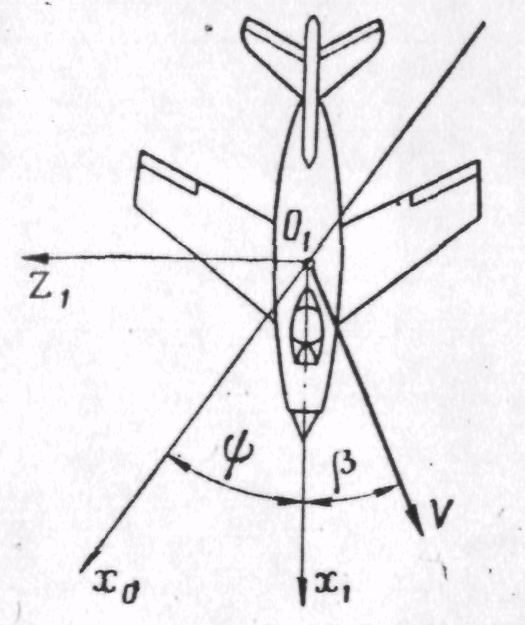
Рис. 6. Углы рыскания и скольжения
Углом атаки называется угол между проекцией вектора скорости V на плоскость симметрии и продольной осью самолета . Угол скольжения — это угол между вектором скорости и плоскостью симметрии самолета.
Направление
вектора скорости в земной системе
определяется углами
![]() и
и
![]() .
Угол наклона траектории
в вертикальной плоскости (рис. 7) — это
угол между вектором скорости V
и
горизонтальной плоскостью. Угол
траектории
измеряется углом между проекцией
вектора скорости V
на
горизонтальную плоскость и осью
земной
системы координат.
.
Угол наклона траектории
в вертикальной плоскости (рис. 7) — это
угол между вектором скорости V
и
горизонтальной плоскостью. Угол
траектории
измеряется углом между проекцией
вектора скорости V
на
горизонтальную плоскость и осью
земной
системы координат.
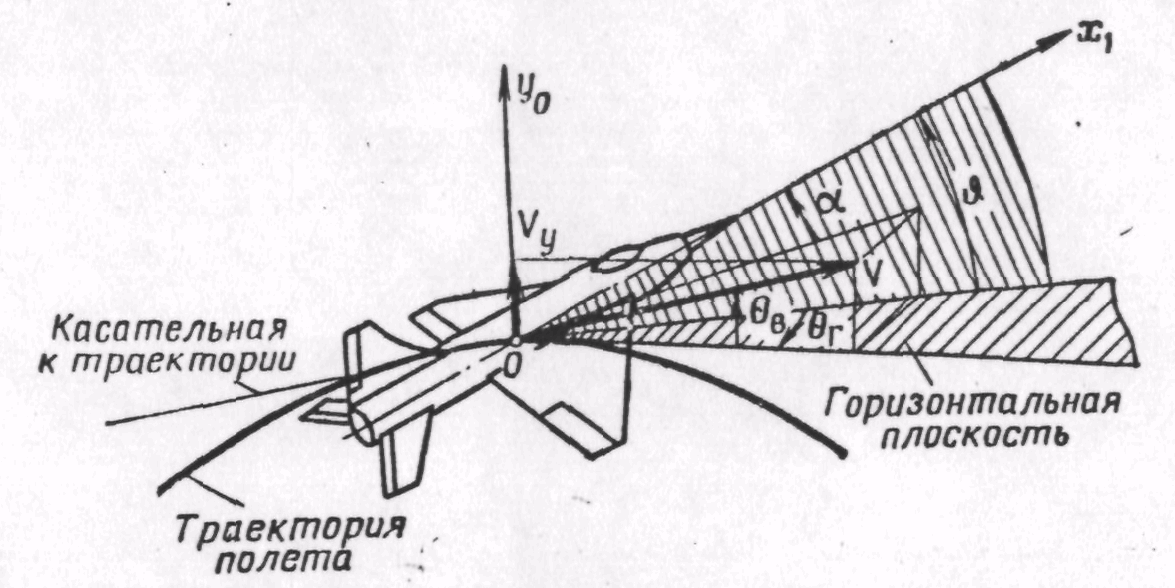
Рис. 7. Углы тангажа, атаки и наклона траектории
Знаки
углов
![]() определяются
следующими правилами:
определяются
следующими правилами:
- угол крена положителен при крене самолета вправо;
- угол рыскания имеет знак «+», если проекция продольной оси самолета на горизонтальную плоскость повернута влево от земной оси ;
- угол тангажа положителен, когда продольная ось самолета направлена вверх от горизонтальной плоскости, проходящей через его центр тяжести;
- угол атаки положителен, если вектор скорости V направлен вниз от продольной оси самолета;
- угол скольжения имеет знак «+», если вектор скорости V находится справа от плоскости симметрии самолета;
- угол наклона траектории положителен, если вектор скорости V направлен вверх от горизонтальной плоскости, проходящей через центр тяжести самолета;
- угол имеет знак «+», когда проекция вектора скорости на горизонтальную плоскость направлена вправо от оси земной системы координат.