

1.2.1 Построение планов положений механизма
 Для
выполнения этого пункта необходимо
знать размеры звеньев:
Для
выполнения этого пункта необходимо
знать размеры звеньев:
 м;
м;
 м.
Определим
масштабный коэффициент
длин:
м.
Определим
масштабный коэффициент
длин:
 ,
,
где
 – отрезок на чертеже, которым изображается
кривошип. Определим
масштабную длину других звеньев:
– отрезок на чертеже, которым изображается
кривошип. Определим
масштабную длину других звеньев:
 ,
,
где
 – отрезок на чертеже;
– отрезок на чертеже;
 –
заданная длина
шатуна.
–
заданная длина
шатуна.
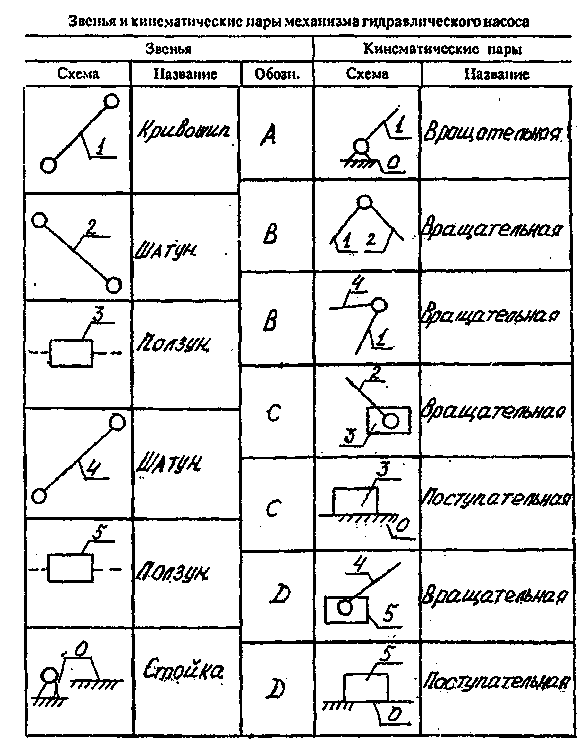
Таблица 1.1 – Звенья и кинематические пары механизма гидравлического насоса
В принятом масштабе выполняем схему механизма в 12 положениях.
 По
построенным планам положений можно
определить траектории движения
точек механизма. Ход ползуна:
По
построенным планам положений можно
определить траектории движения
точек механизма. Ход ползуна:
 .
.
Одно из положений (в данном случае 3-е) обводится основной линией, остальные – тонкими (вспомогательными).
1.2.2 Построение планов скоростей
Планом скоростей называется такое графическое изображение, при котором векторы абсолютных скоростей выходят из одной точки, называемой полюсом. Построение плана рассмотрим на примере 3-го положения механизма.
Определим
скорость точки
.
Поскольку она совершает вращательное
движение относительно центра
 с постоянной угловой скоростью
с постоянной угловой скоростью
 рад/с,
рад/с,
 .
.
Выберем масштаб построения:
 .
.
Из
произвольно выбранного полюса
 проводим вектор
проводим вектор
 длиной 50
мм перпендикулярно звену
длиной 50
мм перпендикулярно звену
 по направлению вращения кривошипа.
по направлению вращения кривошипа.
Для
определения скорости точки
 составим два векторных
уравнения:
составим два векторных
уравнения:

где
 -
вектор скорости неподвижной точки
-
вектор скорости неподвижной точки
 ,
принадлежащей
стойке
,
принадлежащей
стойке
 - векторы скоростей точки
- векторы скоростей точки
 относительно точек
и
- Вектор
относительно точек
и
- Вектор
 является
линейной скоростью вращательного
движения
шатуна относительно точки
.
Следовательно, он перпендикулярен
звену
.
Вектор
является
линейной скоростью вращательного
движения
шатуна относительно точки
.
Следовательно, он перпендикулярен
звену
.
Вектор
 характеризует
поступательное движение
ползуна 3.
характеризует
поступательное движение
ползуна 3.
Систему уравнений решим графически.
Скорость точки равна:

Величину угловой скорости шатуна определим по формуле:

Для определения направления угловой скорости ω2 мысленно переносим вектор относительной скорости VCВ в точку С механизма; его направление укажет направление вращения шатуна.
Построим 12 планов скоростей для каждого положения механизма. Вычислим линейную скорость точки С и угловую скорость ω2 для каждого из них, пользуясь приведёнными выше формулами.
Таблица 1.2 – Линейные и угловые скорости точек и звеньев механизма
Параметр |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
Pc,мм |
5,67 |
30 |
42,57 |
40 |
26,65 |
10,2 |
5,67 |
30 |
42,57 |
40 |
26,65 |
10,2 |
Vc, м/с |
0,16 |
0,83 |
1,17 |
1,1 |
0,73 |
0,28 |
0,16 |
0,83 |
1,17 |
1,1 |
0,73 |
0,28 |
BC,мм |
40 |
36 |
21,5 |
0 |
21,5 |
36 |
40 |
36 |
21,5 |
0 |
21,5 |
36 |
|
2,62 |
2,36 |
1,41 |
0 |
1,41 |
2,36 |
2,62 |
2,36 |
1,41 |
0 |
1,41 |
2,36 |
 ω2
,рад/с2
ω2
,рад/с2