

15.2 Классификация транкинговых систем радиосвязи
Различные системы транкинговой связи в чем-то похожи, а в чем-то отличаются друг от друга. Транкинговые системы можно классифицировать по нескольким группам признаков. В общем, практически все существующие транкинговые системы связи можно разделить (рисунок 15.1) по следующим параметрам:
способ передачи голосовых сообщений; организация доступа к системе;
способ предоставления (удержания) канала
конфигурация радиосети;
способ организации радиоканала;
назначение;
количество абонентов;
применяемые протоколы.
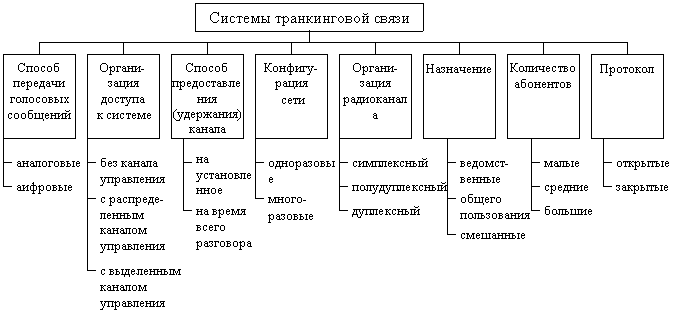
Рисунок 15.1 - Классификация транкинговых систем связи
По способу передачи голосовых сообщений системы транкинговой связи подразделяются на аналоговые и цифровые.
В аналоговых системах речевые сообщения передаются в аналоговом режиме (подобно обычной телефонной связи), а служебная информация – в цифровом. В цифровых системах и речевая, и служебная информация передаются в цифровом виде.
По организации доступа к системе транкинговые системы связи подразделяются на:
без канала управления (SmarTrunk II, Al-Trunk, Z-Trunk);
с распределенным каналом управления (LTR, MultiNet);
с выделенным каналом управления (SmartNet, EDACS, MPT 1327, iDEN, ASTRO, TETRA,APCO 25).
Транкинговые системы без канала управления – это наиболее простые транкинговые системы. В таких системах радиостанция при вызове сама ищет незанятый канал и занимает его. В дежурном режиме радиостанция непрерывно перебирает (сканирует) все каналы системы, проверяя, не вызывают ли ее на одном из них. Поэтому подобные системы называют еще сканирующими.
Сканирующие транкинговые системы просты и дешевы. В этих системах обеспечивается полная независимость каналов базовых станций друг от друга, поскольку их объединение в общую сеть происходит на уровне абонентской радиостанции. Это обуславливает высокую надежность и живучесть транкинговых систем без канала управления.
Система работает следующим образом. При вызове абонента радиостанция последовательно сканирует все каналы системы и, найдя свободный, передает сигнал занятия канала. Данный сигнал содержит индивидуальные номера вызывающей и вызываемой радиостанции. Ретранслятор проверяет права вызывающей радиостанции и производит соединение с корреспондентом или игнорирует вызов. Если вызываемая радиостанция откликается, ретранслятор организует сеанс связи. Среднее время соединения составляет несколько секунд и определяется количеством каналов в системе и скоростью их сканирования.
Сканирующим транкинговым системам присущ ряд принципиальных недостатков. Так, с ростом количества каналов в такой системе быстро возрастает длительность установления соединения, которая не может быть меньше длительности полного цикла сканирования. Реально к этому добавляется еще и длительность поиска свободного канала вызывающей радиостанцией. Кроме того, в этих системах затруднена реализация многих современных требований, в том числе многозоновость, гибкая и надежная система приоритетов, постановка на очередь при занятости системы или вызываемого абонента и т. д.
Эти системы идеально подходят в качестве небольшой (1-8 каналов, до 200 абонентов) однозоновой системы связи с радиусом действия 30-50 км, к которой предъявляются минимальные требования. Количество абонентов в транкинговых системах без канала управления может достигать до 1000. Среднее время соединения составляет несколько секунд. Основными отличительными характеристиками таких систем являются простота, надежность и невысокая стоимость базового оборудования. К ним относятся распространенная еще в СССР система «АЛТАЙ», а также популярная сейчас в России и СНГ система SmarTrunk II.
В транкинговых систах с распределенным каналом управления управляющая информация передается непрерывно по всем каналам, в том числе и по занятым. Это достигается использованием для ее передачи частот ниже 300 Гц. Каждый канал является управляющим для радиостанций, закрепленных за ним. В дежурном режиме радиостанция прослушивает свой управляющий канал.
Служебная информация о состоянии системы, в том числе и о свободных каналах, постоянно передается ретрансляторами (в том числе и занятыми для переговоров) при помощи низкоскоростного сигнала в подтональной части спектра. Базовая станция непрерывно передает номер свободного канала, который радиостанция может использовать для передачи. Если же на каком-либо канале начинается передача, адресованная одной из радиостанций, то информация об этом передается на ее управляющем канале, ' в результате чего эта радиостанция переключается на канал, где происходит вызов. Установление соединения происходит настолько быстро, что оно осуществляется каждый раз при включении передатчика станции, т. е. в паузах разговора канал не занят.
Если канал свободен, то базовая станция передает данные о состоянии системы через каждые 10-15 с, чтобы все закрепленные за этим каналом радиостанции имели обновленную информацию. Канал удерживается только на время одной передачи, что позволяет использовать паузы в разговоре другими абонентами. При такой организации управления радиостанциями отпадает необходимость в специальном канале, и все ретрансляторы обслуживают речевой трафик. Если заняты все каналы, то абонентская радиостанция сообщает об этом при попытке начать сеанс связи.
При выходе из строя какого-либо канала в системе происходит отказ всех радиостанций, для которых он является управляющим. Кроме того, в таких системах связи скорость передачи управляющей информации невысока. Это затрудняет реализацию многих требований, предъявляемых к современным транкинговым системам, в том числе и к многозоновости. Передача информации на частотах ниже 300 Гц одновременно с речью делает такие системы весьма критичными к точности регулировки. Все это привело к тому, что системы с распеределенным управляющим каналом в настоящее время уже не разрабатываются.
К данному классу систем относятся аналоговые системы стандарта LTR, которые работают в диапазоне частот 450 и 800/900 МГц, с шагом 25 кГц. Аналогом LTR является его разновидность – многозоновая система ESAS (800 МГц), которая считается наиболее эффективной с точки зрения «нарезки частот».
Транкинговые системы с выделенным каналом управления – это наиболее совершенные транкинговые системы, преимущественно многозоновые (многосайтовые). В системах такого типа предусмотрен специальный управляющий канал, который осуществляет обработку всех вызовов, поступающих от абонентских радиостанций. Для аналоговых систем речь идет о выделенном частотном канале, для цифровых с временным разделением каналов – о выделенном временном слоте.
В таких системах радиостанция непрерывно прослушивает управляющий канал ближайшей к ней базовой станции. При включении питания радиостанция передает через управляющий канал информацию о регистрации в системе. С данного момента центральный контроллер определяет права данной радиостанции и знает о ее местонахождении в системе. При вызове информация от радиостанции передается через управляющий канал в центральный контроллер, который, зная о местонахождении необходимого абонента, выделяет голосовые каналы для переговоров и осуществляет соединение. Происходит это следующим образом. Базовая станция передает информацию об этом по управляющему каналу, вызываемая радиостанция подтверждает прием вызова, после чего она выделяет один из разговорных каналов для соединения и информирует об этом по управляющему каналу все участвующие в соединении радиостанции. После этого последние переключаются на указанный канал и остаются на нем до окончания соединения.
В то время, когда управляющий канал свободен, радиостанции могут передавать туда свои запросы на установление соединения. Некоторые типы вызовов (например, передача коротких пакетов данных между радиостанциями) могут осуществляться вообще без занятия разговорного канала. В зависимости от режима работы системы разговорный канал предоставляется либо на время сеанса связи, либо на время одной передачи.
При назначении на определенное время сеанса связи канал освобождается по сигналу «отбой», но также в любом случае, по окончании четко установленной продолжительности сеанса связи, изменяемой системой в зависимости от времени суток, загрузки и других критериев.
В некоторых системах при загрузке, близкой к предельной, канал управления переключается на обслуживание речевого трафика и блокирует очередь вызовов.
Наличие центрального контроллера позволяет централизованно управлять системой (с одного операторского места), облегчает сбор информации и многое другое.
Наиболее известными представителями систем с выделенным цифровым каналом управления являются системы стандарта МРТ, разработанные фирмой Zetron. Системы стандарта МРТ 1327 и МРТ 1343 (диапазоны частот 160 и 450 МГц) обеспечивают быстрое установление связи и целый ряд дополнительных удобств, таких как возможность построения многосотовых сетей связи, выявление и эффективное устранение нелегальных абонентов и т. д. Базовая и абонентская аппаратура для системы МРТ 1327 выпускается несколькими производителями в Великобритании, Германии, Франции, Италии, Финляндии, а также в Австралии, Новой Зеландии и Японии.
К системам с выделенным цифровым каналом управления относится открытая многозоновая система стандарта EDACS (Enhanced Digital Access Communications System) фирмы Ericsson. По основным «голосовым» параметрам протокол обмена EDACS сопоставим с ESAS, однако здесь имеется выделенный цифровой управляющий канал для передачи служебной информации.
Принцип действия системы рассмотрим на примере соединения двух абонентов. В исходном состоянии все абонентские радиостанции в пределах зоны действия данной базовой станции находятся на приеме на частоте управляющего канала. На этом канале система постоянно передает сообщения типа ALOHA – приглашение отвечать ей с уведомлением, сколько времени система ждет ответа абонентских станций.
Вызывающий абонент набирает на клавиатуре своей радиостанции номер нужного ему абонента и производит вызов. При этом его радиостанция посылает вызывную последовательность в ответ на очередную посылку ALOHA от базовой станции. Приняв вызов, база проверяет абонента по принципу «свой/чужой» и на том же управляющем канале вызывает второго абонента. Получив от него подтверждение о готовности к связи, база передает обеим радиостанциям команду перестроиться на один из свободных в этот момент «разговорных» каналов связи (каналов трафика).
Обе радиостанции автоматически перестраиваются на указанный канал и начинают переговоры. При нажатии любым из абонентов клавиши «отбой» происходит автоматический возврат радиостанций в ждущий режим на управляющем канале. В случае, когда все каналы трафика заняты, база помещает поступающие вызовы в очередь на обслуживание, обрабатывая вызовы по мере освобождения каналов.
Транкинговые системы связи с выделенным управляющим каналом в наибольшей степени отвечают современным требованиям. В них легко реализуются многозоновость и другие функции. Среди них – постановка вызовов на очередь при занятости системы или вызываемого абонента. А это, в свою очередь, переводит такие системы из класса систем с отказом при занятости в класс систем с ожиданием. Тем самым не только повышается комфортность работы пользователя, но и, главное, увеличивается пропускная способность системы.
В системах с отказом при занятости для обеспечения приемлемого качества сервиса в любой момент времени должен простаивать хотя бы один канал, чтобы абонент мог произвести вызов. В системе с ожиданием загружены могут быть все каналы. При этом правда, вызывающему абоненту придется немного подождать в очереди.
Выделение отдельного управляющего канала имеет и недостатки:
худшее использование частотного ресурса (в большинстве систем этот недостаток смягчается возможностью перевода управляющего канала в разговорный режим при перегрузке системы);
выделенный управляющий канал является уязвимым местом всей транкинговой системы, т. к. при отсутствии специальных мер отказ оборудования базовой станции для этого канала означает отказ всей базовой станции (к тому же результату приводит и появление помехи на частоте приемника управляющего канала базовой станции).
По этой причине при разработке транкинговых систем с выделенным управляющим каналом особое внимание уделяется автоматическому контролю работы оборудования базовой станции. При обнаружении отказа или длительной помехи на частоте приема базовая станция делает управляющим другой, исправный канал. Выделенный управляющий канал предусматривается большинством современных стандартов – как закрытых, так и открытых системы:
По способу удержания канала связи транкинговые системы подразделяются на системы:
с удержанием канала на весь сеанс переговоров (Message Trunking);
с удержанием канала на время одной передачи (Transmission Trunking).
В первом случае в сети обеспечивается постоянный канал связи с абонентом в течение всего сеанса (оборудование стандартов SmarTrank II и МРТ 1327). Такой способ, обычно называемый транкингом сообщений (message trunking), наиболее традиционен для обычных систем связи и применяется при дуплексной связи и подключении к ТфОП.
Во втором случае в сети канал связи переназначается во время сеанса (EDACS, TETRA). Такой способ называется транкинг передачи (transmission trunking) и реализуется только в полудуплексном режиме. При его использовании канал освобождается почти сразу же после окончания работы передатчика абонента; во время следующего включения занимается любой другой свободный канал, выделяемый базовой станцией. Плата за высокую эффективность данного способа – увеличение задержки при высокой загрузке сети, и как следствие фрагментарность и раздробленность разговора.
По конфигурации радиосети транкинговые системы подразделяются на однозоновые (односайтовые) и многозоновые (многосайтовые) системы.