

3 Моделирование высокочастотного шумового воздействия
При прохождении сигнала в среде распространения на него накладываются случайные шумы. В результате обнаружение факта присутствия полезного сигнала по наблюдаемой на входе приемной части смеси сигнал-шум затруднено.
3.1 Принципиальная схема имитатора канала связи.
Шум, действующий в канале связи, обычно распределен по закону Гаусса (нормальному закону). Кроме того, ширина спектральной области, занимаемая шумом, значительно превосходит ширину спектра полезного сигнала. С учетом этих факторов сигнал на выходе имитатора канала связи с шумом Chanl представим в следующем виде:
 (3.1)
(3.1)
где
 – сигнал с выхода модулятора,
– сигнал с выхода модулятора,
 – высокочастотный нормальный случайный
процесс (шум).
– высокочастотный нормальный случайный
процесс (шум).
Шумовой процесс , в свою очередь, можно разложить на сумму двух высокочастотных составляющих:
 (3.2)
(3.2)
Здесь
 и
и
 –низкочастотные некоррелированные
нормальные случайные процессы,
–низкочастотные некоррелированные
нормальные случайные процессы,
 – центральная частота спектра шума
.
– центральная частота спектра шума
.
Таким
образом, формирование смеси
 полезного сигнала и шума можно реализовать
с помощью следующей схемы, изображенной
на рисунке 9 и основанной на выражениях
(3.1), (3.2).
полезного сигнала и шума можно реализовать
с помощью следующей схемы, изображенной
на рисунке 9 и основанной на выражениях
(3.1), (3.2).
 Рисунок
9 – Схема имитатора канала связи с шумом.
Рисунок
9 – Схема имитатора канала связи с шумом.
В
этой схеме независимые источники ЭДС
V1 и V4 формируют низкочастотные случайные
процессы
 и
и
 на основе записанных в файлы Noise1 и Noise2
точек отсчета – некоррелированных
нормальных случайных величин с нулевыми
математическими ожиданиями, единичными
дисперсиями и следующих с интервалом
в 1сек. Это источники типа VPWL_FILE из
библиотеки source.olb. Свойства источников
VSF и TSF соответственно определяют
среднеквадратические значения напряжений
и временной интервал между соседними
отсчетами шума, т.е. задают интенсивность
и скорость изменения мгновенных значений
шума (время корреляции). Источники V2 и
V3 синусоидальные (VSIN), частоты которых
определяются субпараметрами F1, F2,
задаваемыми извне, в свойствах
иерархического блока Chanl. Элементы
суммирования и умножения из библиотеки
abm.olb (SUM и MULT, соответственно) обеспечивают
реализацию соотношений, определяемых
выражениями (3.1), (3.2).
на основе записанных в файлы Noise1 и Noise2
точек отсчета – некоррелированных
нормальных случайных величин с нулевыми
математическими ожиданиями, единичными
дисперсиями и следующих с интервалом
в 1сек. Это источники типа VPWL_FILE из
библиотеки source.olb. Свойства источников
VSF и TSF соответственно определяют
среднеквадратические значения напряжений
и временной интервал между соседними
отсчетами шума, т.е. задают интенсивность
и скорость изменения мгновенных значений
шума (время корреляции). Источники V2 и
V3 синусоидальные (VSIN), частоты которых
определяются субпараметрами F1, F2,
задаваемыми извне, в свойствах
иерархического блока Chanl. Элементы
суммирования и умножения из библиотеки
abm.olb (SUM и MULT, соответственно) обеспечивают
реализацию соотношений, определяемых
выражениями (3.1), (3.2).
Субпараметр rms (root mean square) – среднеквадратичное напряжение шума, которое определяет величину отношения сигнал/шум на выходе канала связи; tau – длительность одной позиции кода Баркера.
Иерархические порты in и out – вход и выход канала связи Chanl.
Результаты расчета схемы приведены на рисунках 10, 11.
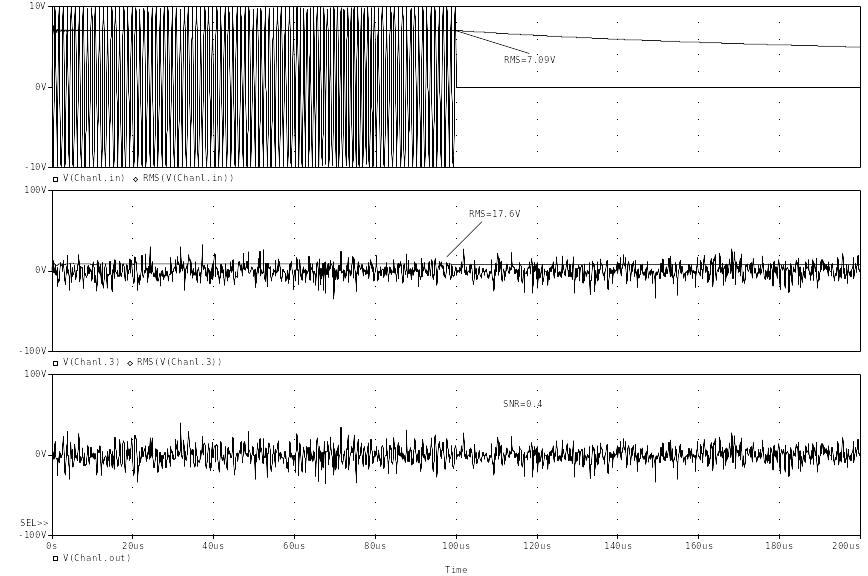
Рисунок 10 –Временные диаграммы шума, входного и выходного сигналов.
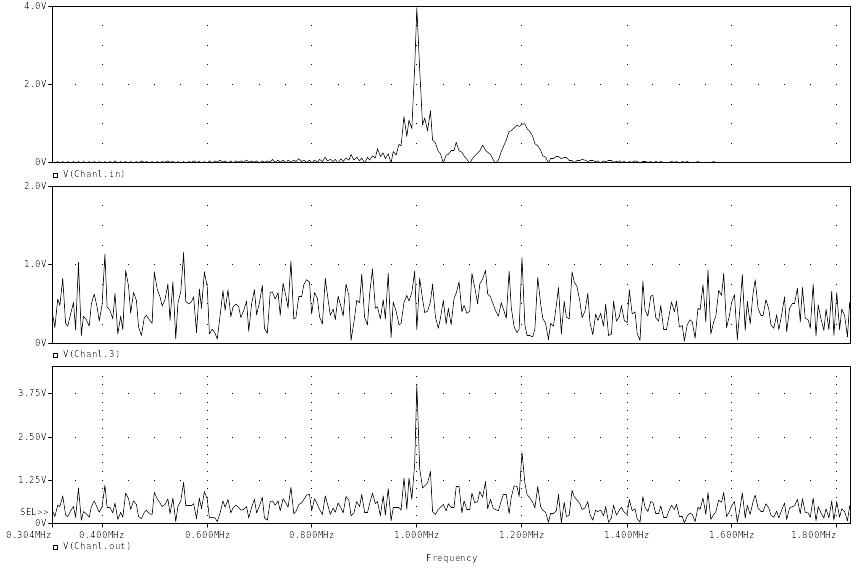
Рисунок 11 – Спектры шума, входного и выходного сигналов.
4 Детектирование модулированных колебаний
На приёмной стороне радиоканала в идеале необходимо выделить из ВЧ сигнала передаваемый полезный низкочастотный сигнал . Эту операцию выполняет демодулятор. Структурная схема демодулятора (рисунок 12) содержит три основных блока:
– частотно-избирательную систему ЧИС,
– блок нелинейных преобразований БНП,
– фильтр нижних частот ФНЧ.

Рисунок 12 – Структурная схема демодулятора
ЧИС представляет собой систему резонансных усилителей для выделения спектральных составляющих передаваемого сигнала . БНП осуществляет преобразование спектра сигнала с выхода ЧИС. В результате появляются новые спектральные составляющие в окрестностях комбинационных частот, в том числе и в области нулевой частоты. Низкочастотные составляющие выделяются с помощью ФНЧ, на выходе которого формируется низкочастотный сигнал, искаженный шумом. Структура блоков ЧИС и БНП определяется конкретным видом модуляции.
4.1 Демодулятор ЧМн - колебаний.
ЧМн-демодулятор (рисунок 14) содержит два полосовых фильтра ПФ1 и ПФ2, настроенных на частоты манипуляции F1 = и F2 = соответственно; две нелинейные цепи НЦ1 и НЦ2; вычитающее устройство ВУ и фильтр нижних частот ФНЧ.
Фактически данная схема представляет собой параллельное включение двух амплитудных детекторов с вычитанием их выходных сигналов (для получения биполярного сигнала на выходе ФНЧ).
Принципиальная схема, изображенная на рисунке 13, выполняет функции НЦ1, НЦ2 и ВУ. Схемы блоков ПФ1, ПФ2 и ФНЧ и их расчет представлены в п.п. 4.2 и 4.3.

Рисунок 13 – Нелинейные цепи и вычитающее устройство демодулятора
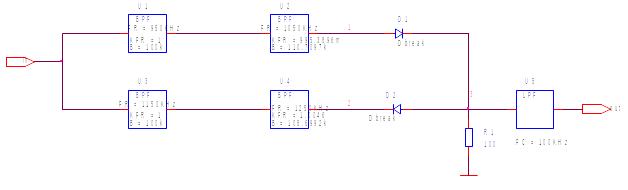
Рисунок 14 – Принципиальная схема ЧМн – демодулятора.
4.2 Полосовой фильтр ЧМн - демодулятора и его настройка.
При настройке полосовых фильтров папка Demodulator менеджера проекта должна быть корневой.
АЧХ
полосового фильтра после его настройки
изображена на рисунке 17. Такая АЧХ может
получиться при последовательном
соединении резонансных усилителей U1 и
U2, U3 и U4 (рисунок 16). Первый усилитель
настроен на частоту
 ,
второй – на частоту
,
второй – на частоту
 ,
третий – на частоту
,
третий – на частоту
 ,
четвертый – на частоту
,
четвертый – на частоту
 .
При этом средняя частота ПФ1 и ПФ2 должна
быть равна соответственно несущей
частоте
и частоте
принимаемого модулированного сигнала.
На входе включен источник ЭДС V1(VAC) с
амплитудой 1В.
.
При этом средняя частота ПФ1 и ПФ2 должна
быть равна соответственно несущей
частоте
и частоте
принимаемого модулированного сигнала.
На входе включен источник ЭДС V1(VAC) с
амплитудой 1В.
В качестве резонансного усилителя используется схема, приведенная на рисунке 15.
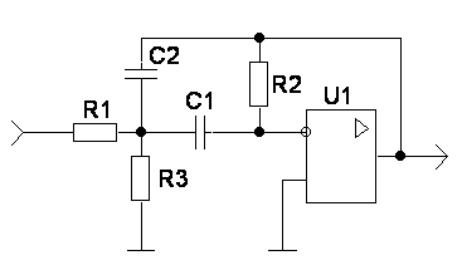
Рисунок 15 - Резонансный усилитель на ОУ.
Данная схема оформлена в виде модели пользователя BPF и находится в библиотеке Rus.lib, а её символьное обозначение – в библиотеке Rus.olb. Модель резонансного усилителя характеризуется тремя параметрами:
1 – Kfr - коэффициент усиления на резонансной частоте;
2 – Fr - резонансная частота;
3 – В - ширина полосы пропускания по уровню -3 дБ.
Эти параметры определяют численные значения элементов схемы:
 (4.1)
(4.1)
 ;
(4.2)
;
(4.2)
 (4.3)
(4.3)
Здесь
 (величина С может выбираться произвольно).
(величина С может выбираться произвольно).
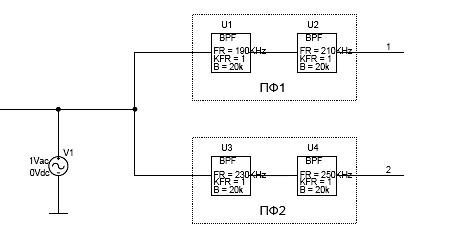
Рисунок 16 - Принципиальная схема настройки полосового фильтра ЧМн-демодулятора.
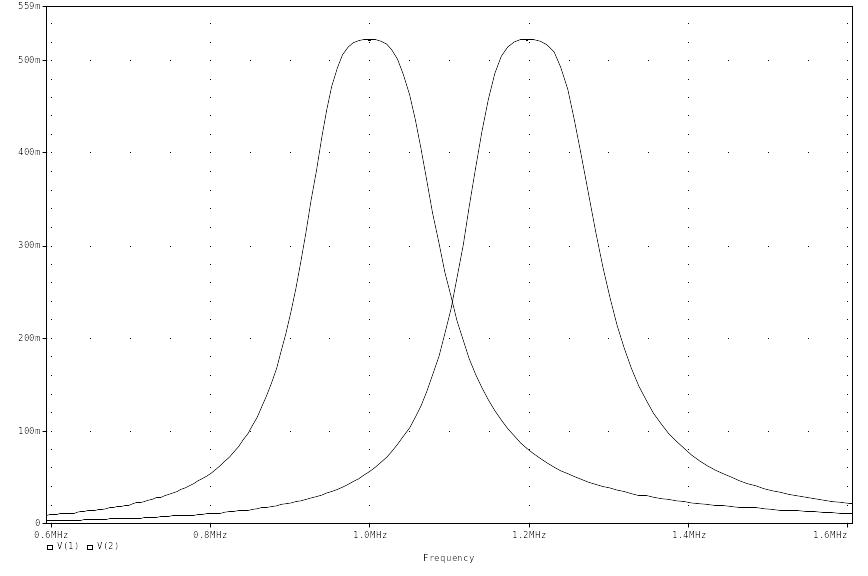
Рисунок 17 – АЧХ полосового фильтра после его настройки.
4.3 Фильтр нижних частот
Схема инвертирующего универсального активного ФНЧ 2-го порядка со сложной отрицательной обратной связью и его символьное обозначение приведены на рисунке 18.
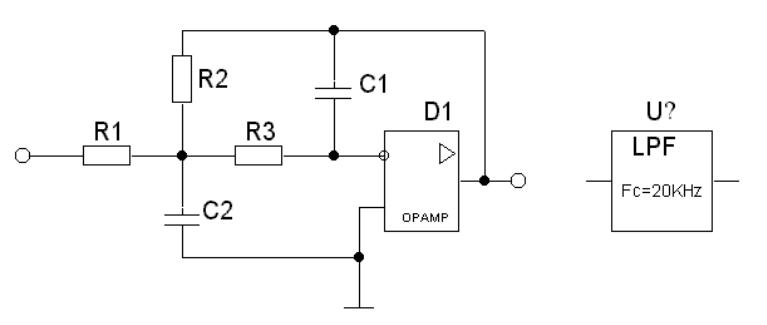
Рисунок 18 – Активный фильтр 2-го порядка со сложной ООС.
Данная схема оформлена в виде макромодели пользователя LPF и находится в библиотеке Rus.lib, а её символьное обозначение – в библиотеке Rus.olb. Параметры модели:
–
 -
модуль коэффициента усиления на нулевой
частоте;
-
модуль коэффициента усиления на нулевой
частоте;
–
 -
частота среза по уровню -3дБ;
-
частота среза по уровню -3дБ;
–
 ,
,
 - коэффициенты, определяющие тип фильтра,
выбираются из таблицы 1.
- коэффициенты, определяющие тип фильтра,
выбираются из таблицы 1.
Величины номиналов R1, R2, R3, C2 определяются через параметры K0, Fc, a1, b1 при заданном значении C1 = 10нф:
 ;
(4.4)
;
(4.4)
 ;
(4.5)
;
(4.5)
 ;
(4.6)
;
(4.6)
 (4.7)
(4.7)
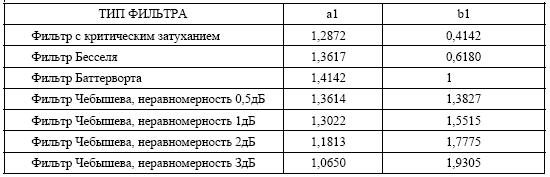
Таблица 1 – Типы фильтров НЧ.
По умолчанию модель LPF соответствует фильтру Баттерворта с коэффициентом усиления K0 = 1 и Fc = 20кГц.
После включения модели LPF в схему демодулятора необходимо вычислить частоту среза Fc по формуле Fc = 2/τ, где τ - длительность одной позиции, и ввести ее значение в поле Fс компонента. Остальные параметры ФНЧ менять не нужно (значения по умолчанию - фильтр Баттерворта). Выполняем расчет демодулятора, сделав папку System корневой и подключив системный профиль моделирования System-tran.
Результаты расчета представлены на рисунках 19, 20.

Рисунок 19 – Временные диаграммы напряжений на выходах ПФ1, ПФ2, ВУ и ФНЧ.
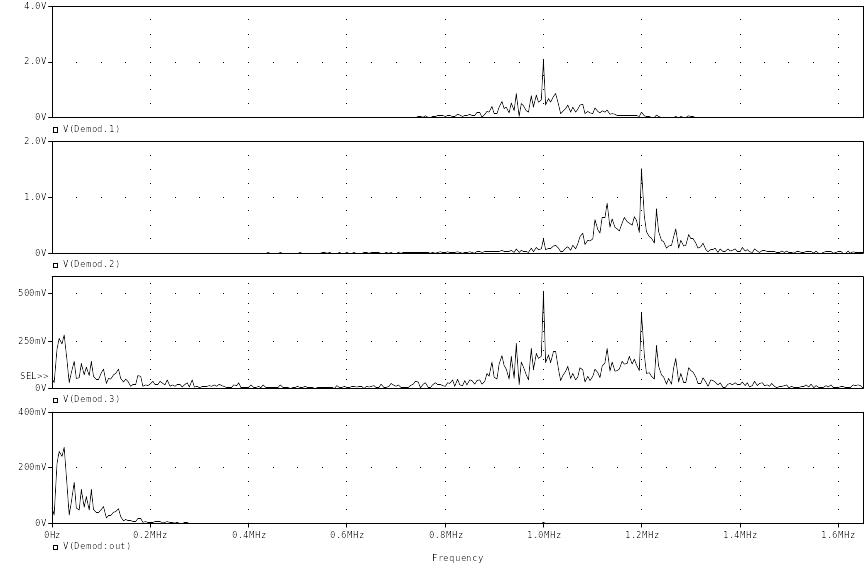
Рисунок 20 – Спектры напряжений на выходах ПФ1, ПФ2, ВУ и ФНЧ.
5 ПРОЕКТИРОВАНИЕ И АНАЛИЗ СОГЛАСОВАННОГО ФИЛЬТРА
5.1 Синтез согласованного фильтра
Согласованный
(оптимальный) фильтр максимизирует
отношение сигнал/шум на своём выходе.
Структура СФ в общем случае определяется
сигналом Баркера u(t) и вероятностными
характеристиками шума n(t). Так, если на
входе СФ действует аддитивная смесь:
x(t)=u(t)+n(t), t [0,T],
где n(t) - гауссовский белый шум, то
комплексный коэффициент передачи G(jω)
и импульсная характеристика g(t) фильтра
имеют вид:
[0,T],
где n(t) - гауссовский белый шум, то
комплексный коэффициент передачи G(jω)
и импульсная характеристика g(t) фильтра
имеют вид:
G(jω) = kU*(jω)еxp(-jωt0) (5.1)
g(t) = ku(t0 - t) (5.2)
Здесь U*(jω) - комплексно-сопряженная спектральная плотность сигнала u(t);
k - коэффициент усиления СФ, задаваемый произвольно;
t0 - временная задержка фильтра, определяемая из условия физической реализуемости:
g(t) = 0, t < 0 (5.3)
Условие (5.3) означает, что отклик фильтра на произвольное входное воздействие не может появиться раньше этого воздействия. Обычно выбирают t0 = Т = Nτ - длительность сигнала u(t).
Рассмотрим некоторые свойства CФ:
1 - Сигнал на выходе фильтра, согласованного с входным сигналом u(t), совпадает по форме с автокорреляционной функцией (АКФ) этого сигнала, сдвинутой по оси времени на величину t0. Это непосредственно следует из подстановки импульсной характеристики (5.2) и сигнала u(t) в интеграл Дюамеля, связывающего выходной сигнал с импульсной характеристикой g(t) и входным сигналом u(t). Таким образом, выходной сигнал в момент t = t0 имеет максимум, пропорциональный энергии входного сигнала u(t);
2 - Импульсная характеристика g(t) СФ при t0 = 0 является зеркальным отображением сигнала u(t) (при k=1) относительно оси ординат (рисунок 21).
Из (5.3) и рисунка 21 следует, что для физической реализуемости СФ необходимо сдвинуть g(t) вправо на величину t0 ≥ T = Nτ.
Свойство ''2'' лежит в основе процедуры синтеза согласованного фильтра по заданному многопозиционному сигналу u(t), для чего необходимо:
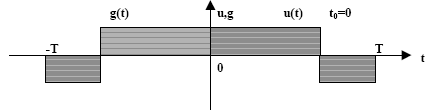
Рисунок 21 – Связь g(t) и u(t) при t0 = 0
Для анализа согласованного фильтра необходимо:
1) Найти передаточную функцию СФ по формуле:
 (5.4)
(5.4)
где T = Nτ, U(s) – вычисленное в пункте 2.1 преобразование Лапласа сигнала u(t).
Найдем G(s):
 .
.
2) По передаточной функции G(s) определить принципиальную схему согласованного фильтра.
По полученному выражению передаточной функции фильтр, согласованный с кодом Баркера, должен состоять из линий задержки, интегратора и сумматора, осуществляющего взвешенное суммирование входных сигналов. Причём весовые коэффициенты могут быть как положительными, так и отрицательными. Принципиальная схема согласованного фильтра изображена на рисунке 22.
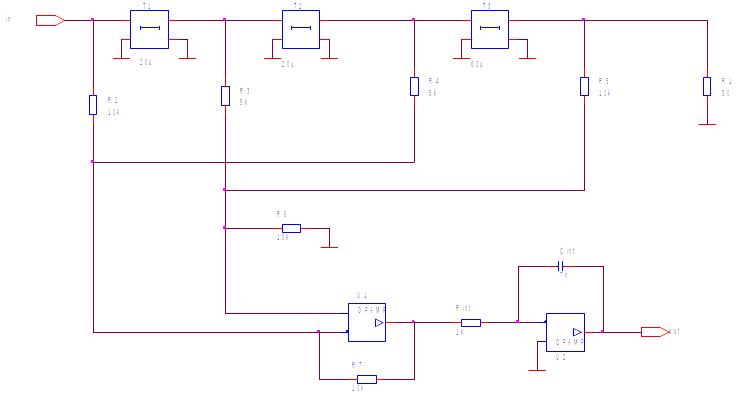
Рисунок 22 - Принципиальная схема согласованного фильтра.
В качестве интегратора используем схему, состоящую из операционного усилителя, сопротивления Rint, включенного между входом интегратора и инвертирующим входом ОУ, и конденсатора Cint, включенного между инвертирующим входом и выходом ОУ. Неинвертирующий вход ОУ заземлен. Модуль коэффициента передачи |Кус| интегратора определяет коэффициент усиления согласованного фильтра:
 (5.5)
(5.5)
3) Сделать папку SF корневой, открыть страницу схемы папки SF и нарисовать принципиальную схему согласованного фильтра в редакторе Capture. Теперь можно анализировать СФ отдельно от всей системы.
4) Тестировать принципиальную схему СФ. Для этого к входному порту в открытой схеме СФ подключите иерархический блок Bark генератора кода Баркера, скопировав его из схемы папки System. Создайте новый профиль моделирования, унаследованный (Inherit From) от существующего профиля System-tran. Проведите моделирование программой PSpice. Если сигнал на выходе СФ не совпадает по форме с АКФ сигнала u(t), значит, в процессе синтеза или при составлении схемы были допущены ошибки. Если же тест завершился успешно, распечатайте графики входного и выходного сигналов.
Результаты тестирования представлены на рисунке 23.
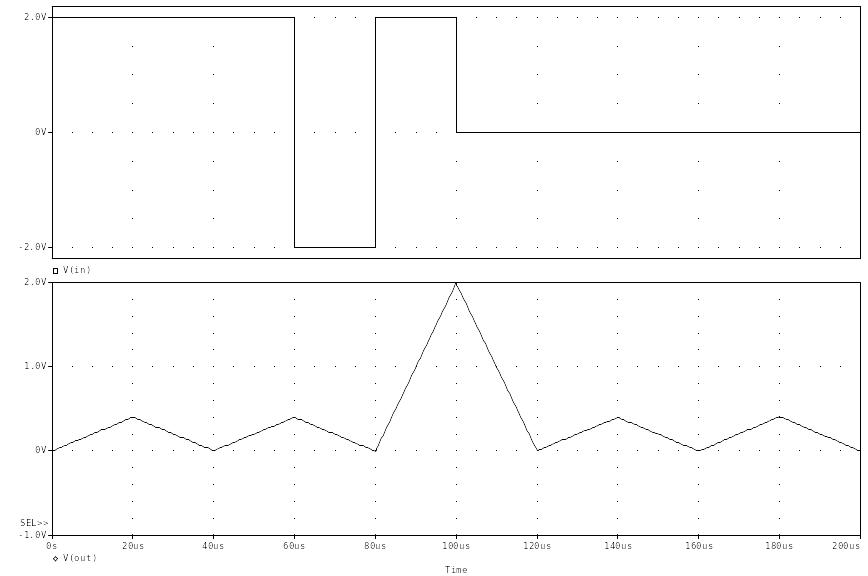
Рисунок 23 - Временные диаграммы напряжений на входе и выходе согласованного фильтра в режиме тестирования.
5.2 Анализ прохождения выходного сигнала демодулятора через согласованный фильтр.
Расчет проводился с использованием ранее созданного профиля моделирования System-tran. Результаты расчета приведены на рисунках 24, 25. Порог срабатывания решающего устройства Uпор = 2,5 В.
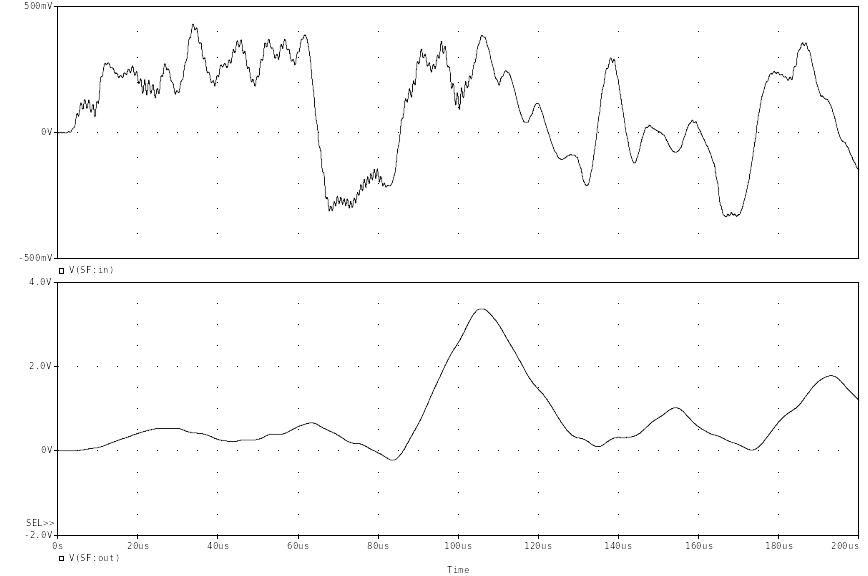
Рисунок 24 - Временные диаграммы напряжений на входе и выходе согласованного фильтра.
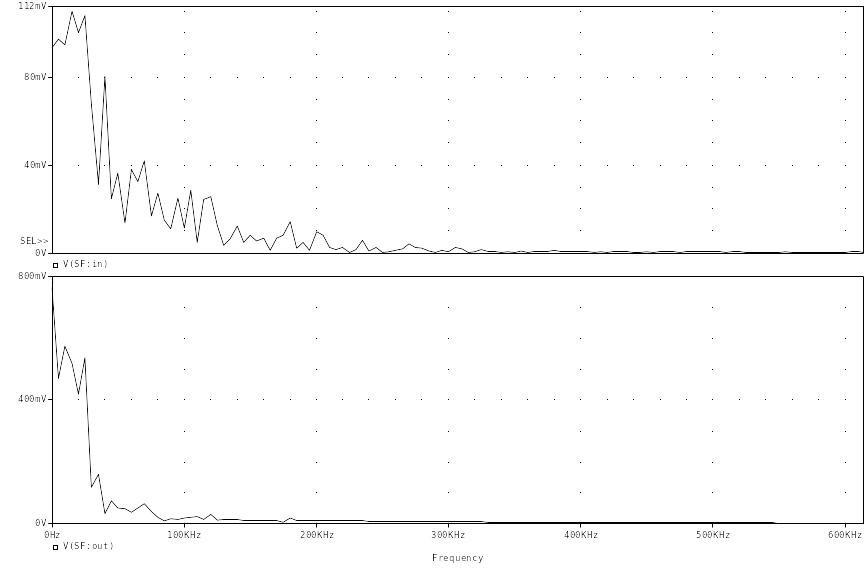
Рисунок 25 - Спектры напряжений на входе и выходе согласованного фильтра.
6 ПРОЕКТИРОВАНИЕ И АНАЛИЗ РЕШАЮЩЕГО УСТРОЙСТВА
Решающее устройство предназначено для формирования импульса прямоугольной формы в момент, когда напряжение с выхода СФ превысит заданный пороговый уровень Unop. Факт наличия прямоугольного импульса на выходе РУ свидетельствует об обнаружении сигнала.
В качестве РУ обычно используют операционные усилители в нелинейном режиме, триггеры Шмитта и компараторы. В настоящей курсовой работе применим схему РУ на компараторе K521CA2 в интегральном исполнении. Модель данной микросхемы находится в библиотеке Ruslib\Comparat.olb под именем K521CA2. Принципиальная схема РУ на компараторе показана на рисунке 26.

Рисунок 26 – Принципиальная схема решающего устройства.
Делитель R1, R2 задаёт порог срабатывания компаратора:
 (6.1)
(6.1)
Напряжение питания E = 10В. Полагая R2 = 1ком, находим R1 при Unop = 2,5 В:
R1 = 3 кОм.
Результат анализа решающего устройства представлен на рисунке 27.

Рисунок 27 – Сигнал с выхода СФ и выходной сигнал компаратора.
ЗАКЛЮЧЕНИЕ
В результате проделанной работы была разработана система обнаружения сигнала Баркера. Были промоделированы и проанализированы следующие части системы:
1-генератор сигнала,
2-модулятор,
3-канал связи с шумом,
4-УВЧ и демодулятор,
5-согласованный фильтр,
6-решающее устройство.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1 Бочкарев В.А. Методические указания к лабораторным работам по курсу "Основы компьютерного проектирования и моделирования РЭС", СГАУ, 2007.- 42с.
2 Бочкарев В.А. Методические указания к курсовой работе по дисциплине «Основы компьютерного проектирования и моделирования РЭС», СГАУ, 2008.- 30с.