

Тема 1. Перетворення у двомірному просторі
Перетворення в двомірному просторі використовуються в різноманітних випадках: щоб окремі частини об'єкта можна було описувати в різних координатних системах; щоб типові і повторювані частини можна було розташовувати в довільних положеннях на кресленні і в просторі, в тому числі з використанням циклів; щоб без повторного кодування можна було отримувати симетричні частини об'єкта; для спрямованої деформації фігур, тіл і їх частин; для зміни масштабу креслення, побудови проекцій просторових образів, тощо. З аналітичної точки зору перетворення - це перерахунок значень координат.
Перетворення точки.
Точка на площині представляється двома координатами: |x, y|. Матриця перетворення точки виглядає так:
![]()
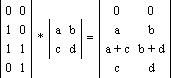
Нижче показано перетворення точки через квадратну матрицю; тут xn=xa+yc та yn=xb+yd – нові координати точки після перетворення:
![]()
Перетворення фігури.
Якщо уявити фігуру як сукупність точок, то можна провести і її перетворення. У наступному прикладі задано чотири точки: A(0,0), B(1,0), C(1,1), D(0,1), кожна з яких після перетворення переходить відповідно в A*(0,0) , B*(a,b), C*(a+c,b+d), D*(c,d):
Геометрично це відповідає деформації фігури:
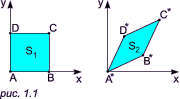
Рис. 1.2.
При цьому площа нової фігури дорівнює площі старої фігури, помноженої на детермінант матриці перетворення: S2=S1*|ad-bc|.
Однорідні координати та операції над ними.
Будь-яка система координат, в якій уявлення точки в двомірному (тривимірному) просторі задається за допомогою трьох (чотирьох) координат (Р1, Р2, Р3 (, Р4)), називається системою однорідних координат. Взагалі, для n-мірного простору число однорідних координат має бути на одиницю більше: n+1.
Застосування однорідних координат в загальному випадку дозволяє усувати аномалії, що виникають при роботі в декартових координатах, і представляти складні перетворення у вигляді добутку декількох матриць.
Геометрична інтерпретація на випадок двомірного простору: введення третьої координати, що дорівнює одиниці, можна трактувати як перехід в тривимірний простір, в якому дозволено працювати тільки в площині z=1. Слід уявляти собі, що екран комп'ютера (картинну площину, площину зображення) знаходиться в площині z=1:

Рис. 1.3.
У разі виходу малюнка за перетин z=1, рисунок повертається примусово у дане січення – для того, щоб були можливі наступні операції:
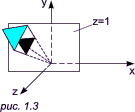
Рис. 1.4.
Така операція називається нормалізацією однорідних координат:
Загальний вигляд перетворення.

Операція зсуву.
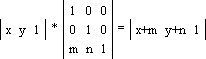
Матриця перетворення містить у собі константи m та n, під дією яких точка зміщується на m одиниць вздовж осі x і на n одиниць – вздовж осі y:
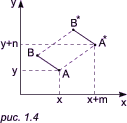
Рис. 1.5.
Операція масштабування.
За рахунок коефіцієнтів a і d матриці перетворення відбувається збільшення (або зменшення) значення координат точки (x, y) в a і d раз по осях x та y відповідно:
Рис. 1.6.
Загальне повне масштабування.

В даному випадку при s<1 буде відбуватися збільшення значення координат точки (x, y) в s разів; при s> 1 ми отримаємо зворотний ефект – зменшення значення координат (x, y) в s разів.
Поворот
на кут
![]() :
:

Тут – кут, на який потрібно повернути точку (x, y).
Зверніть увагу: поворот відбувається відносно точки (0, 0) декартової системи координат проти годинникової стрілки!
Приклад:
Спробуємо
повернути трикутник на кут
![]() ,
із заданими наступними координатами
точок: A(3,
-1), B(4,
1), C(2,
1).
,
із заданими наступними координатами
точок: A(3,
-1), B(4,
1), C(2,
1).
Оскільки кут повороту рівний 90 º, відповідно матриця повороту буде мати наступний вигляд:
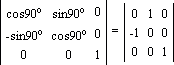
Підставивши значення точок, отримаємо:
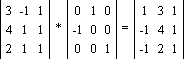

Рис. 1.7.
Відповідь: A*(1, 3), B*(-1, 4), C*(-1, 2).
Відображення або віддзеркалювання.
Віддзеркалення відносно прямої y=x (рис. 1.8a):

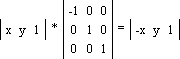
Віддзеркалення відносно прямої x=0 (рис. 1.8b):
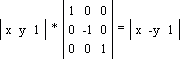
Віддзеркалення відносно прямої y=0 (рис. 1.8c):
Віддзеркалення відносно початку координат (рис. 1.8d):

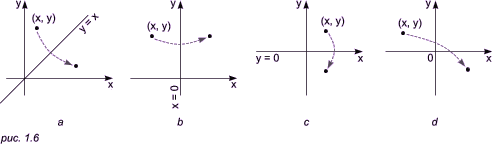
Рис. 1.8.
Поворот фігури навколо довільної точки (m, n) на довільний кут α.
Щоб провести будь-яке складне перетворення, необхідно розкласти його на базові операції. Поворот фігури навколо довільної точки (m, n) на довільний кут a складається з трьох базових операцій: 1) перенесення фігури на вектор A(-m,-n) для суміщення точки (m, n) з початком координат, 2) поворот фігури на кут α, 3) перенос фігури на вектор A'(m, n) для повернення її в початкове положення. Так як фігуру можна уявити набором точок, то операції 1) - 3) можна виконувати послідовно для кожної точки. Покажемо це на прикладі.
Нехай ми хочемо повернути трикутник з координатами A(x, y), B(x1, y1), C(x2, y2) навколо точки D (m, n) на кут α. Нехай P-S – матриця переносу точки на вектор A(-m,-n), Vα – матриця повороту на кут α, PS – матриця переносу точки на вектор A'(m, n).
Отже, ми маємо всі дані, необхідні для проведення складного перетворення першої точки – A(x, y):

Точно такі ж перетворення необхідно провести для решти двох точок трикутника, підставляючи відповідні їх координати замість x і y (послідовність операцій див на рис. 1.9). Таким чином, складна операція розбивається на найпростіші і задається результатом відповідних матриць перетворення, причому порядок, в якому перемножуються матриці, істотно визначає результат.

Рис. 1.9.
Центральне проектування (перспектива).

рx + qy + 1 = H – площина.
Примітка:
У загальному випадку від зміни матриць місцями результат змінюється. Матриці операцій, що йдуть підряд, можна перемножувати роздільно, головне – не змінювати їх порядок слідування (див. примітку 1).
Лінії при описаних вище (афінних) перетвореннях переходять в лінії. Тому зазвичай проводиться перерахунок тільки координат вершин фігури, а після цього відповідні вершини в результуючої фігурі з'єднуються, як і у вихідній фігурі.
Афінне
перетворення
– це відображення
![]() ,
яке можна записати у вигляді
,
яке можна записати у вигляді
![]() .
.
де М
– обернена матриця і
![]() .
.
Інакше кажучи, перетворення називається афінним, якщо його можна отримати наступним чином:
Вибрати «новий» базис простору з «новим» початком координат
 ;
;Кожній точці x простору поставити у відповідність точку f (x), що має ті ж координати щодо «нової» системи координат, що і x в «старій».
Знаходження точки перетину двох ліній (приклад).
Нехай є дві лінії: x + y = 1, 2x – 3y = 0, необхідно знайти точку їх перетину. Рішення може бути знайдено з використанням матриць. Перенесемо всі члени рівнянь в ліву частину: x + y - 1 = 0, 2x – 3y – 0 = 0; запишемо коефіцієнти першого рівняння в перший стовпець матриці, другого рівняння – у другий. Таким чином отримаємо наступну матрицю:

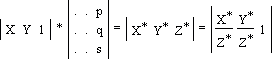
Умова, при якому перетинаються дві прямі, виглядає наступним чином: |x y 1|*M= |0 0 1|.
Для знаходження відповіді необхідно обидві частини попереднього рівняння домножити справа на обернену матрицю M -1 (при перемножуванні M і M -1 виходить одинична матриця E): |x y 1|*E= |0 0 1|*M -1.

|x y 1| = |3/5 2/5 1|
Відповідь: Точка перетину прямих: x = 3/5, y = 2/5.