

3.3. Определение усилий в кинематических парах механизма
При движении механизма усилия в его кинематических парах постоянно изменяется как по величине, так и по направлению. В любом положении механизма можно найти эти усилия, рассматривая данное положение механизма как положение мгновенного равновесия, для чего ко всем подвижным звеньям механизма в рассматриваемом положении необходимо приложить силы инерции и моменты сил инерции этих звеньев.
Затем, расчленяя механизм на отдельные звенья или группы звеньев и рассматривая отдельно их равновесие под действием внешних сил и сил инерции, нетрудно определить усилия во всех кинематических парах механизма. При этом следует помнить, что звенья или группы звеньев, на которые можно расчленить механизм, должны выбираться с учетом их статистической определимости, т. е. таким образом, чтобы из всех сил, действующих на выбранное звено или группу звеньев, количество неизвестных сил не превышало число уравнений равновесия.
Напомним, что число уравнений равновесия для произвольно расположенных в плоскости сил равно 3, для сходящихся сил – 2 и для параллельных сил – 2.
Расчет по определению усилий в кинематических парах, как правило, начинается с рассмотрения крайних групп механизма, в которые можно включить несколько звеньев, чаще – два звена. Такие группы обычно сразу представляют собой статистически определимые системы и не требуют предварительного определения некоторых неизвестных усилий для получения статистически определимых систем.
При рассмотрении равновесия выбранных звеньев или групп звеньев механизма следует освободить эти звенья или группы от связей (т. е. от других звеньев механизма) и заменить действие этих связей реакциями связей.
При этом величины реакций связей (усилия в кинематических парах) определяются из решения уравнений равновесия звеньев или групп звеньев.
Направления же реакций связей определяются видом связи и, как правило, известны.
Напомним, что для двух гладких тел, соприкасающихся друг с другом, сила, с которой одно тело действует на другое (реакция связи), направлена нормально к поверхностям этих тел в точке их соприкосновения (гладкими называют тела, при движении которых друг относительно друга отсутствует трение).
Для двух тел, связанных между собой цилиндрическим шарниром, силу, с которой одно тело действует на другое (реакцию связи), можно представить в двух вариантах:
1. проходящую по заранее неизвестному направлению через центр шарнира;
2. состоящую из двух взаимно перпендикулярных составляющих (компонент), проходящих через центр шарнира.
3.4. Определение масс и моментов инерции звеньев
Центры тяжести стержневых звеньев располагают на осях вращения этих звеньев или в центрах масс фигур. Массы и моменты инерции определяют по эмпирическим формулам.
Массы звеньев, имеющих линейные размеры, определяют по формуле
![]() ,
(3.11)
,
(3.11)
где
![]() – масса
– масса
![]() -го
звена, кг;
-го
звена, кг;
![]() – удельный вес погонного метра звена,
Н/м;
– удельный вес погонного метра звена,
Н/м;
![]() – ускорение свободного падения,
– ускорение свободного падения,
![]() – длина
-го
звена, м;
– длина
-го
звена, м;
![]() – удельная масса, кг/м.
– удельная масса, кг/м.
Если
удельный вес
не задан в условии, то
![]() для шатуна,
для шатуна,
![]() для коромысел,
для коромысел,
![]() для кулис и кривошипов.
для кулис и кривошипов.
Удельные
массы
![]() взять равными
взять равными
![]() .
.
Масса поршней в двигателях и компрессорах
![]() ,
,
где
![]() – масса шатуна.
– масса шатуна.
Масса камня кулисы
![]() ,
,
где
![]() – масса кулисы.
– масса кулисы.
Масса долбяков, резцовых призм поперечно-строгальных станков, главных ползунов прессов
![]() ,
,
где
![]() – ход ползуна,
– ход ползуна,
![]() (расстояние между двумя крайними
положениями ползуна).
(расстояние между двумя крайними
положениями ползуна).
Масса зубчатых колес
![]() ,
,
где
![]() – радиус делительной окружности,
– радиус делительной окружности,
![]() – масса зубчатого колеса.
– масса зубчатого колеса.
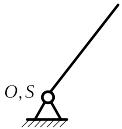
Момент инерции тонкого однородного стержня относительно оси, перпендикулярной стержню и расположенной у одного из его концов (рис. 3.8), определяется по формуле
![]() .
(3.12)
.
(3.12)
Момент инерции этого же стержня относительно оси, проходящей через середину стержня (рис. 3.9), определяется по формуле
![]() .
(3.13)
.
(3.13)
Этот момент инерции называют центральным, так как он является моментом инерции относительно оси, проходящей через центр тяжести.
Рассмотрим
звено − «уголок» (рис. 3.10), состоящее из
двух жестко соединенных частей
![]() и
и
![]() .
.
Рис. 3.8 |
Рис. 3.9 |
Рис. 3.10 |
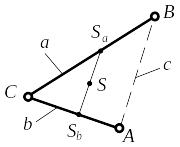
Рассмотрим звено − «уголок» (рис. 3.10), состоящее из двух жестко соединенных частей и . В этом случае следует:
а) определить момент инерции каждой отдельной части относительно собственного центра масс:
![]() ,
,
![]() ,
,
где
![]() и
и
![]() – массы отдельных частей;
и
– длины стержней BC
и AC;
– массы отдельных частей;
и
– длины стержней BC
и AC;
б) найти положение общего центра масс, используя отношение
![]() ;
(3.14)
;
(3.14)
в)
определить момент инерции всего звена
относительно центра масс
![]() по формуле
по формуле
![]() .
(3.15)
.
(3.15)
Один из авторов данного пособия (О. В. Конищева) предлагает следующий вывод для определения момента инерции «уголка».
Заменим отношение (3.14) другим:
![]() ,
,
где
![]() – отрезок, соединяющий середины отрезков
AC
и BC,
поэтому в треугольнике ABC
является средней линией , а значит
– отрезок, соединяющий середины отрезков
AC
и BC,
поэтому в треугольнике ABC
является средней линией , а значит
![]() (c
= AB).
(c
= AB).
Отсюда
![]() ,
, ![]() ,
, ![]() .
.
Обозначим
![]() ,
тогда выражение (3.15) приобретет вид
,
тогда выражение (3.15) приобретет вид
Таким образом, зная геометрические параметры «уголка» можно определить его момент инерции:
 .
(3.16)
.
(3.16)
Рассмотрим
треугольное звено. Здесь могут быть два
случая. Первый случай – треугольник
представляет собой стержневую конструкцию,
приведенную на рис. 3.11, тогда её центр
тяжести расположен в центре окружности,
вписанной в треугольник, соединяющий
середины сторон
![]() .
.
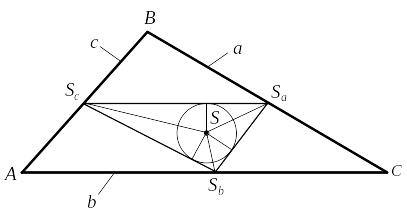
Рис. 3.11
На
рис. 3.11, точка S
– центр вписанной в
окружности, или центр тяжести,
![]() – середины сторон. Обозначим длины
сторон
– середины сторон. Обозначим длины
сторон
![]()
![]()
![]() Известно, что момент инерции этого звена
определяется по формуле
Известно, что момент инерции этого звена
определяется по формуле
![]() .
(3.17)
.
(3.17)
Один из авторов пособия (О.В. Конищева) предлагает следующий вывод для определения момента инерции такого треугольного звена.
Рассмотрим
![]() .
Он подобен
,
значит, углы этих треугольников
соответственно равны
.
Он подобен
,
значит, углы этих треугольников
соответственно равны
![]()
![]()
![]() .
Выразим длины сторон:
.
Выразим длины сторон:
![]() (3.18)
(3.18)
Решим эту систему уравнений. Получим
 ,
,
 ,
,
 .
.
Выразим квадраты этих отрезков, используя тригонометрические формулы:
аналогично
![]() ,
,
![]() .
.
Подставим полученные формулы в выражение (3.17), выразив массы через удельную массу :

Таким образом, момент инерции треугольного звена, представляющего собой стержневую конструкцию, определим по формуле
![]() .
(3.19)
.
(3.19)
Во втором случае, когда треугольное звено представляет собой пластину, его центр тяжести лежит на пересечении медиан (рис. 3.12). Определим момент инерции «стержневого» треугольника относительно точки, лежащей на пересечении медиан.
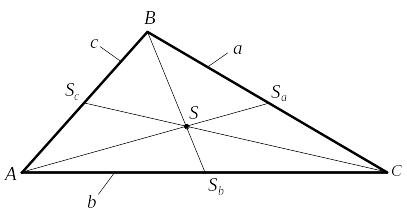
Рис. 3.13
В этом случае момент инерции треугольного звена определяется по формуле, аналогичной формуле (3.17):
![]() .
(3.20)
.
(3.20)
Один из авторов учебного пособия (О.В. Конищева) предлагает следующий вывод для определения этого момента инерции.
Выразим отрезки:
![]() ,
,
![]() ,
,
![]() .
.
Медианы определяются следующим образом:
![]() ,
,
![]() ,
,
![]() .
.
Подставим эти выражения в (3.20):
где
![]() – масса треугольного звена.
– масса треугольного звена.
Таким образом, момент инерции стержневого треугольного звена относительно точки, лежащей на пересечении медиан, определяется по формуле:
![]() .
(3.21)
.
(3.21)
Расхождение результатов, полученных по формулам (3.19) и (3.21) составляет 0,75 %, что незначительно. Поэтому, с целью упрощения расчетов стержневого треугольного звена, его центр масс возьмем на пересечении медиан, как для пластины, и момент инерции будем определять по формуле (3.21).