

1.8. Структурный анализ плоского рычажного шестизвенного механизма с качающейся кулисой
Кинематическая схема рычажного механизма представлена на рис.1.11.

Рис. 1.11
Исходные данные:
![]()
![]()
![]()
![]()
![]()
![]()
![]() .
.
1.8.1. Количество и названия звеньев механизма
Определим звенья, входящие в механизм:
1 – кривошип (совершает вращательное движение, полный оборот);
2 – шатун (совершает плоско-параллельное движение);
3 – коромысло (вращательное движение, неполный оборот);
4 – кулисный камень (относительное поступательное движение вдоль кулисы);
5 − кулиса (вращательное движение);
0 – стойка (неподвижные части механизма).
1.8.2. Количество и характер кинематических пар
В данном механизме (рис. 1.11) все пары низшие, пятого класса. Будем обозначать низшие вращательные пары – НВП, а низшие поступательные – НПП.
О − НВП звеньев 0−1;
А − НВП звеньев 1−2;
В − НВП звеньев 2−3;
Е − НВП звеньев 3−0;
С − НВП звеньев 2−4;
![]() − НПП звеньев 4−5;
− НПП звеньев 4−5;
F − НПП звеньев 5−0.
Степень подвижности механизма определим по формуле Чебышева
![]()
где n = 5; р5 = 7; р4 = 0.
![]()
Степень подвижности механизма равна единице. Это значит, что механизм имеет одно ведущее звено.
1.8.3. Разложение механизма на группы Ассура
Начнем разложение механизма на группы Ассура с последних звеньев.
Данная группа (рис. 1.12) состоит из звеньев 4 и 5. Это структурная группа II класса, 2-го порядка (двухповодковая), вида 3. Данная группа имеет n = 2, р5 = 3, W = 0.
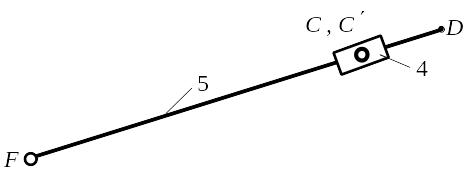
Рис. 1.12
Выделим из механизма вторую структурную группу (рис. 1.13), которая состоит из звеньев 2 и 3. Это структурная группа II класса, 2-го порядка, вида 1. Данная группа имеет n = 2, р5 = 3, W = 0.
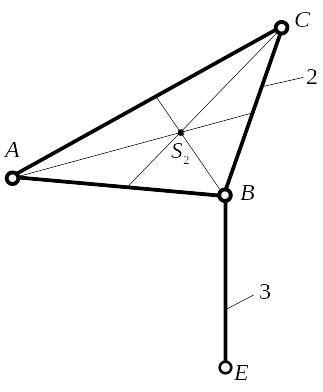
Рис. 1.13
Нулевое звено (стойка) вместе с первым (ведущим) звеном образуют ведущий механизм I класса (рис. 1.14), который имеет n = 1; р5 = 1, W = 1.

Рис. 1.14
Вывод: рассматриваемый механизм является механизмом второго класса. Формула его построения имеет вид
![]()
где римскими цифрами указан класс групп звеньев.