

1.5. Замена высших пар низшими в плоском механизме
В плоских механизмах высшую пару условно можно заменить низшими кинематическими парами. Это делают для удобства структурного или кинематического расчета.
Рассмотрим схему плоского механизма с высшей кинематической парой (рис. 1.4, а). В точке К звенья 1 и 2 образуют высшую кинематическую пару. Для замены высшей пары низшими необходимо соблюсти два условия: сохранить ту же степень подвижности механизма и характер мгновенного относительного движения звеньев.

а б
Рис. 1.4
Алгоритм замены высших кинематических пар низшими:
1. Из точки касания К провести общую нормаль к кривым элементов кинематических пар (рис. 1.4, а).
2. Определить положение центров кривизны А и В кривых в данной точке К.
3. В центрах кривизны А и В поместить вращательные пары.
4. Соединить центры А и В прямой и получить отрезок АВ, который явится фиктивным звеном.
5. Соединить центры А и В с центрами (осями) вращения звеньев 1 и 2 (рис. 1.4, б).
Таким образом, вместо механизма, представленного на рис. 1.4, а), получим заменяющий механизм, приведенный на рис. 1.4, б. Одна высшая пара заменяется группой, состоящей из одного фиктивного звена и двух низших пар. Данная замена справедлива только для заданного положения механизма.
В случае если один элемент кинематической пары плоский (линия), то центр кривизны такого элемента находится в бесконечности. Тогда в точке касания К (рис. 1.5) помещается поступательная пара.
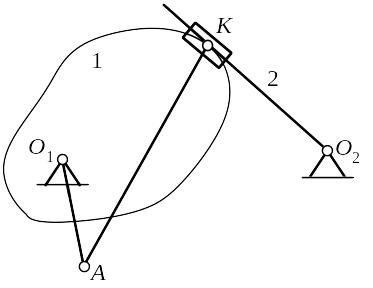
Рис. 1.5
1.6. Принцип образования плоских механизмов (по Ассуру)
В 1914 году профессор Петроградского политехнического института Л.В. Ассур(1878−1920) предложил все кинематические цепи разбить на две группы:
1. Кинематические цепи с одним подвижным звеном и стойкой;
2. Кинематические цепи с нулевой степенью подвижности.
Представим характеристику цепи с одним подвижным звеном и стойкой (рис. 1.6):
а) звено 1, представленное на рис. 1.6, а, совершает простейшее вращательное движение, на рис. 1.6, б – поступательное;
б) степень подвижности этой цепи равна единице;
в) задан закон движения звена: = (t), S = S(t).
а б
Рис. 1.6
Кинематическая цепь на рис. 1.6 называется механизмом первого класса. Первое звено чаще всего бывает ведущим. Независимую координату, определяющую положение этого звена, называют обобщенной координатой. В механизме может быть несколько таких звеньев, называемых группой начальных звеньев.
Используя возможность замены высших пар низшими, перепишем формулу Чебышева (1.3) в виде
![]() ,
,
где n − число подвижных звеньев; p5 − число пар пятого класса.
Для группы Ассура получим уравнение
![]() ,
,
из которого определим соотношение между числом звеньев и числом кинематических пар в группе Ассура:
![]() .
(1.5)
.
(1.5)
Из формулы (1.5) видно, что если р5 и n − целые числа, то n может быть только четным числом.
а б
Рис. 1.7
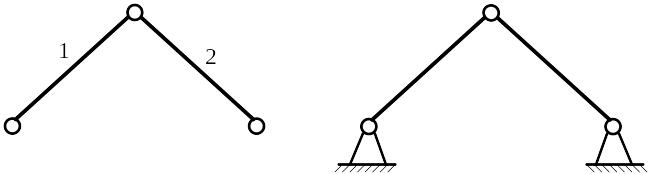
Представим другую характеристику кинематической цепи с нулевой степенью подвижности − группы Ассура, представленной на рис. 1.7, а:
а) степень подвижности группы равна нулю (W = 0);
б) при присоединении группы Ассура к стойке образуется неподвижное соединение − ферма (рис. 1.7, б);
в) в цепи должно быть обеспечено определенное соотношение между числом подвижных звеньев и числом кинематических пар (см. формулу (1.4)).