

1. Структурный анализ и классификация плоских механизмов
1.1. Основные понятия и определения
Современные методы кинематического и динамического, в том числе кинетостатического (силового), исследования механизмов определяются строением этих механизмов, т. е. их структурой. Поэтому исследование (анализ) всякого механизма должно начинаться с изучения его структуры. Перед тем как приступить к изучению структуры и их классификации, рассмотрим некоторые понятия и определения, встречающиеся в курсе ТММ.
Механизмом называется механическая система (совокупность тел), предназначенная для преобразования движения одного или нескольких тел в требуемые движения других тел.
Твердые тела, образующие механизм, называются звеньями. При этом имеются в виду как абсолютно твердые, так и деформируемые гибкие тела. Звено может состоять из одной или нескольких деталей, которые воспринимают движение как одно целое. В механизме имеются ведущие (входные) и ведомые (выходные) звенья. Звено механизма, совершающее движение, для выполнения которого предназначен механизм, называется ведомым. Ведущим (входным) называется звено, которому движущими силами, передающимися от источников энергии (двигателя), сообщается движение, преобразуемое механизмом с помощью соединительных звеньев в требуемые движения ведомых звеньев. Движение этих звеньев исследуется по отношению к неподвижному звену, или стойке. В стационарных механизмах стойкой является вся система неподвижных деталей, а в транспортных машинах — детали, жестко связанные с корпусом машины.
Звенья механизма входят в соединения между собой так, что всегда имеет место движение одного звена относительно другого. Подвижное соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой (КП). Поверхности, линии, точки звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называются элементами кинематической пары. Для того чтобы элементы пары были в постоянном контакте, она должна быть замкнута геометрическим (за счет конструкции звеньев) или силовым (пружиной и др.) способом.
Условные обозначения звеньев представляют собой прямые и ломаные линии, треугольники, прямоугольники и т. п.
1.2. Классификация кинематических пар
Для удобства структурного анализа механизмов кинематические пары классифицируются по различным признакам:
1) по числу условий связи, накладываемых на относительное движение звеньев;
2) по характеру относительного движения звеньев;
3) по характеру соприкосновения звеньев.
Условия связи.
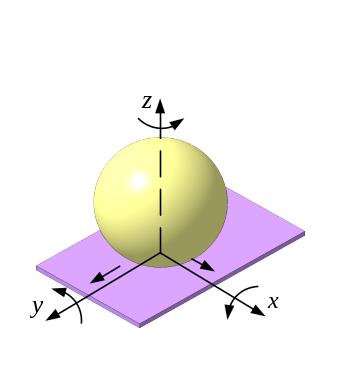
Свободное твердое тело (звено) в пространстве обладает шестью степенями свободы, т. е. оно может совершать три независимых поступательных движения вдоль взаимно перпендикулярных осей и три вращательных движения вокруг тех же осей (рис. 1.1). Если же звено входит в кинематическую пару, то на его относительное движение, т. е. на движение по отношению ко второму звену, входящему в эту пару, накладываются определенные ограничения. Эти ограничения называются условиями связи.
П
Рис.
1.1
В зависимости от способа соединения звеньев в кинематическую пару число условий связи может изменяться от одного до пяти. В противном случае кинематическая пара перестанет существовать. Поэтому все кинематические пары можно разделить на пять классов. К первому классу относятся пары, накладывающие на относительное движение звеньев одно условие связи (пятиподвижные пары), ко второму — пары, накладывающие два условия (четырехподвижные пары), к третьему — три (трехподвижные пары) и т. д.
В табл. 1.1 представлены некоторые виды кинематических пар всех пяти классов. Стрелками обозначены возможные относительные движения звеньев.
Таблица 1.1
Класс КП |
Число условий связи |
Число степеней свободы |
Кинематические пары |
Условное изображение |
1 |
2 |
3 |
4 |
5 |
1 |
1 |
5 |
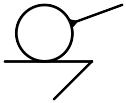
Шар − плоскость |
|
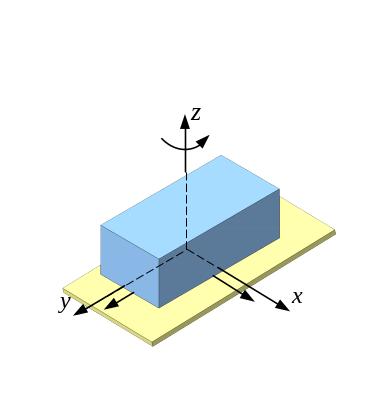
2 |
2 |
4 |
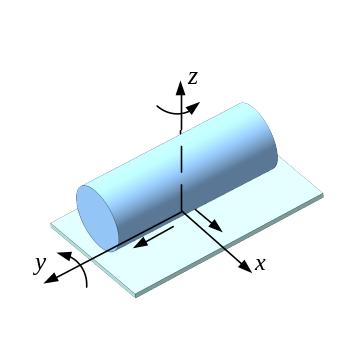
Цилиндр − плоскость |
|
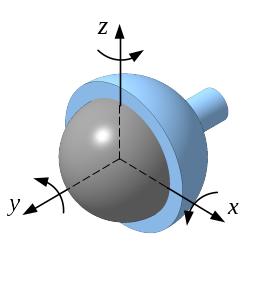
3 |
3 |
3 |
Сферический шарнир |
|


Окончание таблицы 1.1
1 |
2 |
3 |
4 |
5 |
3 |
3 |
3 |
Плоскостная |
|
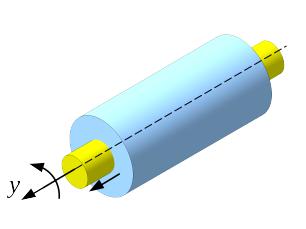
4 |
4 |
2 |
Цилиндрическая |
|
5 |
5 |
1 |
Поступательная |
|
5 |
5 |
1 |
Вращательная |
|




В табл. 1.1 показаны наиболее распространенные кинематические пары с их условными обозначениями по ГОСТ 2770−68, которые дополнены обозначениями, рекомендованными Международной организацией по стандартам ИСО ТК/10 ПК4 «Условные обозначения кинематических схем механизмов».
Характер относительного движения.
Кинематические пары по этому признаку подразделяются на пространственные и плоские. Если форма кинематической пары такова, что она определяет собою плоскопараллельное относительное движение звеньев, то такая пара называется плоской. В противном случае пара будет пространственной.
Характер соприкосновения звеньев.
По данному признаку различают кинематические пары низшие и высшие. Низшими кинематическими парами называются такие, в которых звенья соприкасаются по поверхности. В высших парах звенья соприкасаются в точке или по линии.
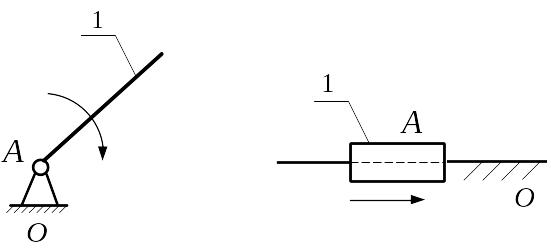
а б
Рис. 1.2
К плоским низшим парам относятся следующие пары пятого класса:
1) вращательная (шарнир), которая допускает только вращательное движение одного звена относительно другого вокруг оси шарнира (рис. 1.2, а);
2) поступательная (ползун в прямолинейных направляющих), в которой одно звено может двигаться относительно другого только поступательно вдоль оси направляющей (рис. 1.2, б).
К плоским высшим парам относятся пары четвертого класса.