

4.5. Идеальное интегрирующее звено
(Слайд 21)
Звено описывается уравнением
![]() . (4.24)
. (4.24)
В операторной форме
![]() . (4.25)
. (4.25)
Или в другой форме записи
![]() ,
откуда и получилось название звена. В
идеальном интегрирующем звене выходная
величина пропорциональна интегралу по
времени от входной или скорость изменения
выходной величины пропорциональна
входной величине звена.
,
откуда и получилось название звена. В
идеальном интегрирующем звене выходная
величина пропорциональна интегралу по
времени от входной или скорость изменения
выходной величины пропорциональна
входной величине звена.
Передаточная функция звена
![]() . (4.26)
. (4.26)
Такое звено является идеализацией реальных интегрирующих звеньев, часть которых будет рассмотрена ниже. Идеальным будет считаться такое звено, у которого можно пренебречь влиянием собственных переходных процессов.
(Слайд 22)
Примеры интегрирующих звеньев приведены на рис. 4.11. Наиболее часто в качестве интегрирующего звена используется операционный усилитель в режиме интегрирования (рис. 4.11, а). Интегрирующим звеном является также обычный гидравлический демпфер (рис. 4.11, б). Входной величиной является здесь сила F, действующая на поршень, а выходной – перемещение поршня x.
(Слайд 23)
Переходная функция идеального интегрирующего звена при х1 = 1(t) и нулевых начальных условиях
![]() (4.27)
(4.27)
и функция веса
![]() . (4.28)
. (4.28)
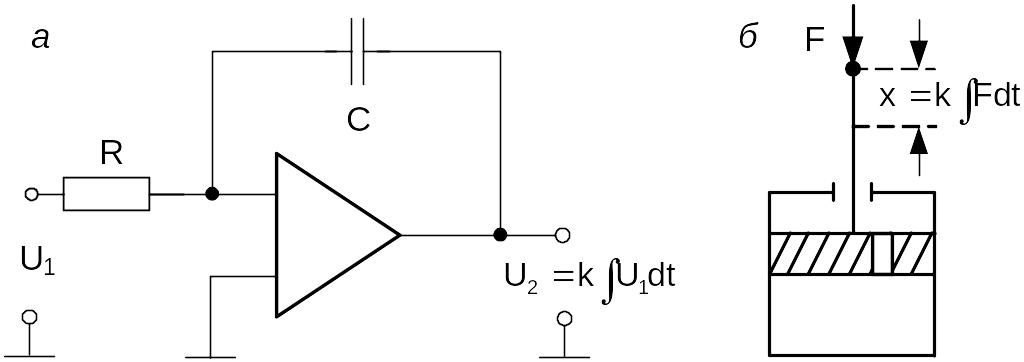
Рис. 4.11. Идеальные интегрирующие звенья
(Слайд 24)
Временные характеристики изображены на рис. 4.12.
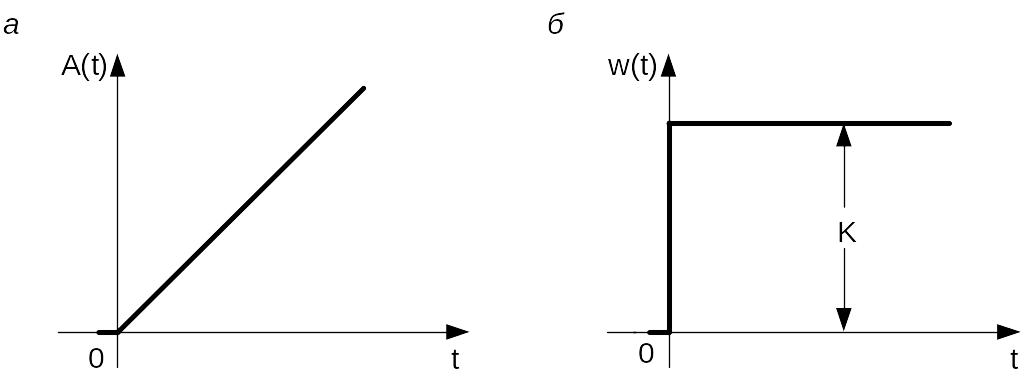
Рис. 4.12. Переходная функция (а) и дельта-функция (б) идеального интегрирующего звена
(Слайд 25)
Частотная передаточная функция, её модуль и фаза соответственно равны
![]() ; (4.29)
; (4.29)
![]() ;
= -
90 при > 0;
= +
90 при < 0. (4.30)
;
= -
90 при > 0;
= +
90 при < 0. (4.30)
(Слайд 26)
Частотные характеристики изображены на рис. 4.13
Амплитудная характеристика показывает,
что звено пропускает сигнал тем сильнее,
чем меньше его частота. При = 0
модуль
![]() ,
а при
,
а при![]() ,
,
![]() .
Амплитудно-фазовая характеристика для
положительных частот сливается с
отрицательной частью оси мнимых.
.
Амплитудно-фазовая характеристика для
положительных частот сливается с
отрицательной частью оси мнимых.
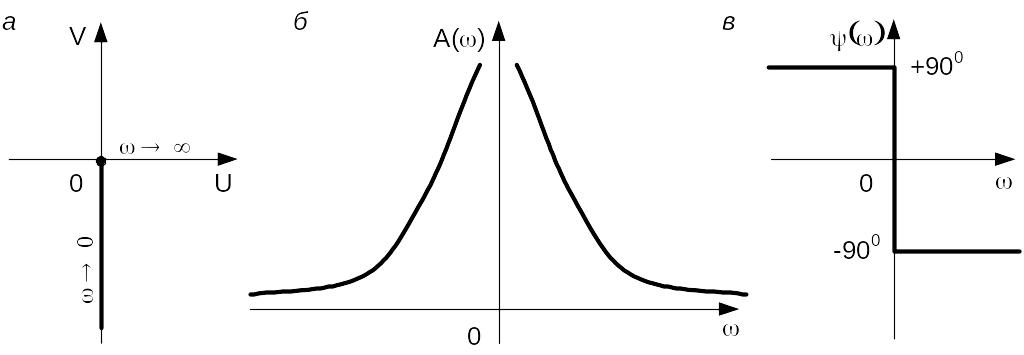
Рис. 4.13. АФЧХ (а), АЧХ (б) и ФЧХ (в) идеального интегрирующего звена
Построение ЛАХ выполняется по выражению
![]() . (4.31)
. (4.31)
Нетрудно видеть, что ЛАХ представляет собой прямую с отрицательным наклоном 20 дБ/дек, пересекающую ось нуля децибел при частоте среза ср = k. ЛФХ представляет собой прямую = – 90, параллельную оси частот.
4.6. Инерционное интегрирующее звено
(Слайд 27)
Звено описывается дифференциальным уравнением:
![]() (4.32)
(4.32)
или
![]() . (4.33)
. (4.33)
Передаточная функция звена
![]() . (4.34)
. (4.34)
Примером такого звена является двигатель постоянного тока, если в качестве входной величины рассматривать напряжение на якоре, а в качестве выходной – угол поворота вала двигателя.
Интегрирующее звено с замедлением можно представить как совокупность двух звеньев, включенных последовательно, – идеального интегрирующего и апериодического звена первого порядка.
(Слайд 28)
Для нахождения переходной характеристики удобно передаточную функцию представить в виде суммы
![]() , (4.35)
, (4.35)
что позволяет представить решение дифференциального уравнения в виде суммы решения для идеального интегрирующего звена и решения для апериодического звена первого порядка, которые были рассмотрены ранее. В результате получаем переходную функцию звена при х1 = 1(t) и нулевых начальных условиях
![]() (4.36)
(4.36)
и функцию веса
![]() . (4.37)
. (4.37)
(Слайд 29)
Временные характеристики изображены на рис. 4.14. На характеристиках изображены построения, с помощью которых можно по экспериментальной характеристике определить параметры звена.
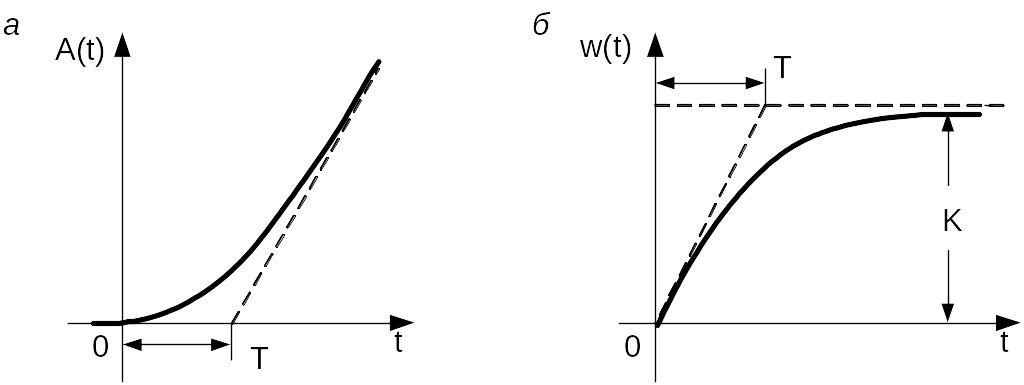
Рис. 4.14. Переходная функция (а) и дельта-функция (б) инерционного интегрирующего звена
(Слайд 30)
Частотная передаточная функция, её модуль и фаза равны соответственно
![]() ; (4.38)
; (4.38)
![]() (4.39)
(4.39)
(Слайд 31)
Амплитудная, фазовая и амплитудно-фазовая
характеристики изображены на рис. 4.15.
Из характеристик видно, что звено также
пропускает сигналы тем сильнее, чем
меньше их частота. В отличие от предыдущего
звена фазовый сдвиг равен –
90 только на очень
низких частотах. С ростом частоты фазовый
сдвиг
![]() при
.
при
.
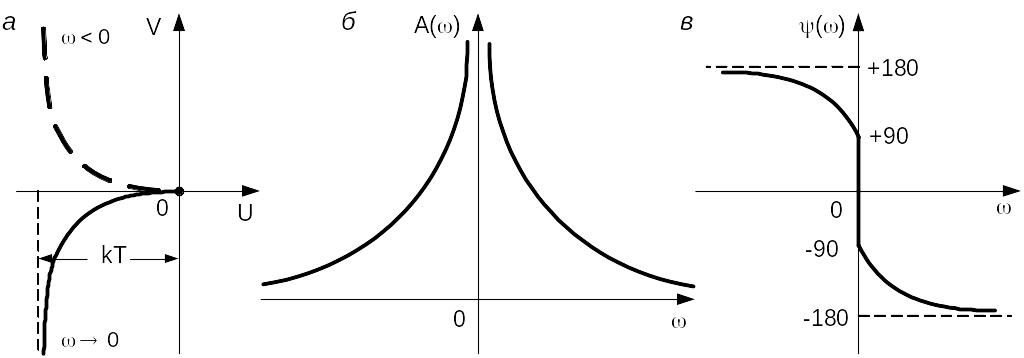
Рис. 4.15. АФЧХ (а), АЧХ (б) и ФЧХ (в) инерционного интегрирующего звена
Построение ЛАХ выполняется по выражению
![]() . (4.40)
. (4.40)
(Слайд 32)
Сначала проводится вертикальная линия (рис. 4.16), соответствующая сопрягающей частоте = 1/T. При частотах, меньших, чем сопрягающая, можно приближенно положить .
Это будет аналогичная предыдущему звену прямая с отрицательным наклоном 20 дБ/дек, имеющая частоту среза ср = k. Прямую можно провести в области малых частот до сопрягающей частоты (прямая а–b).
Правее сопрягающей частоты, то есть при
частотах > 1/T,
в выражение (4.40), можно пренебречь
единицей по сравнению с
![]() .
Поэтому вместо (4.40) можно принять
приближенное выражение
.
Поэтому вместо (4.40) можно принять
приближенное выражение
![]() . (4.41)
. (4.41)
Этому выражению соответствует прямая с отрицательным наклоном 40 дБ/дек. Поэтому правее точки b нужно провести прямую с наклоном 40 дБ/дек (прямая b–c). Ломанная прямая а–b–c представляет собой асимптотическую ЛАХ. Действительная ЛАХ (показана пунктиром) будет иметь наибольшее отклонение от асимптотической в точке b, то есть при сопрягающей частоте. Ошибка в этой точке будет составлять 3 дБ, то есть в линейном масштабе ошибка амплитуды будет в раз меньше. По мере удаления от сопрягающей частоты влево и вправо действительная ЛАХ будет сливаться с асимптотами, то есть прямыми а–b и b–с.
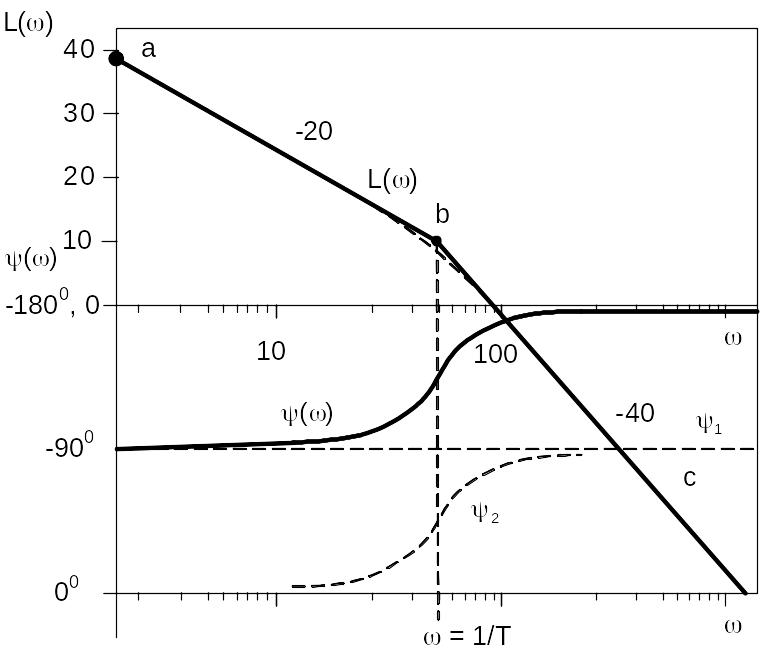
Рис. 4.16. ЛАХ и ЛФХ инерционного интегрирующего звена
ЛФХ строится суммированием постоянного фазового сдвига 1 = – 90 и переменного фазового сдвига 2 = – аrctg Т. При сопрягающей частоте имеем 2 = – 45 и = 1 + 2 = – 135.
Из логарифмических характеристик видно, что звено приближается к идеальному интегрирующему звену при частотах, меньших сопрягающей, и тем точнее, чем меньше рабочая частота по сравнению с сопрягающей.