

Проектирование в Matlab
Синтез структурной схемы. Выбор регулятора.
Для проектирования регулятора необходимо собрать структурную схему в программе Simulink и воспользоваться или использовать систему автоматизированного проектирования регулятора в цепи обратной связи reg.m.
Структурная схема имеет следующий вид:
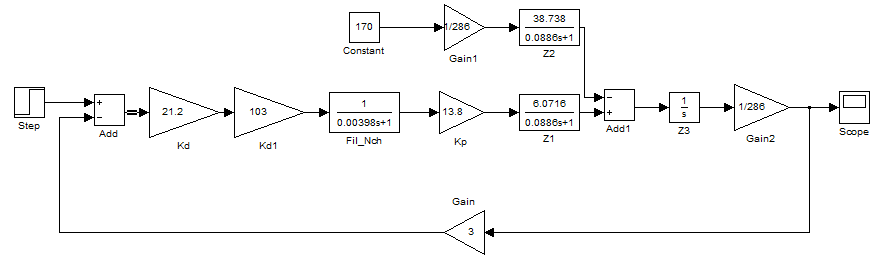
Рис.6: Структурная схема в Simulink
Система без регулятора:

Рис.7: Характеристика системы без регулятора
Воспользовавшись методом reg.m получили следущую передаточную функцию регулятора в цепи обратной связи:

Структурная схема с регулятором в цепи обратной связи принимает следующий вид:
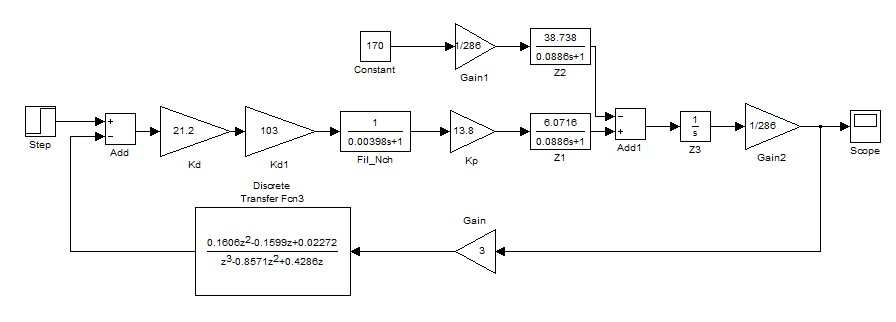
Рис.8: Структурная схема с регулятором в цепи обратной связи
После применения регулятора:
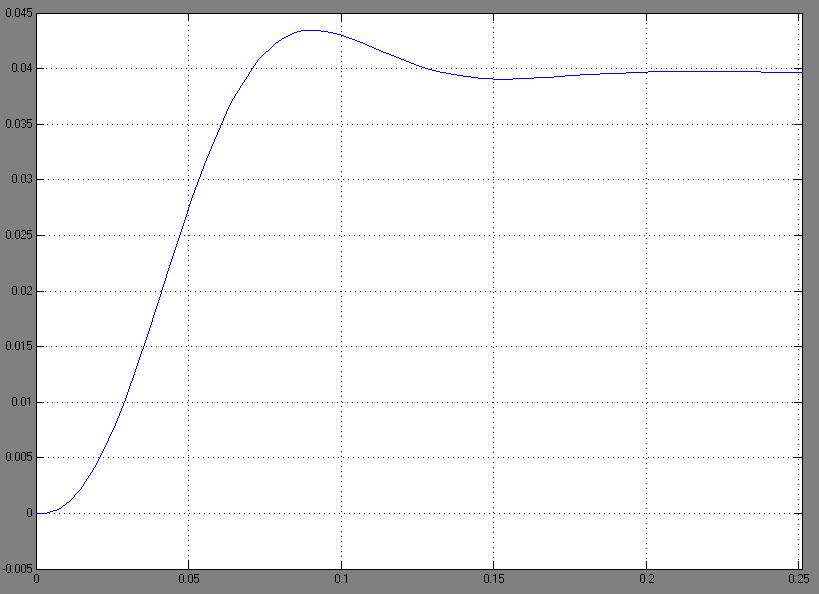
Рис.9:Характеристика системы с регулятором

Рис.10: Переходный процесс.
Анализируем переходный процесс:
Перерегулирование
составляет

Длительность
переходного процесса составляет

Время
реакции составляет

Установившееся значение составляет 24.4
Структурная схема регулятора. Шаблон программы.
Составим структурную схему регулятора.
Передаточная функция:
Для
построения структурной схемы поделим
числитель и знаменатель передаточной
функции на
 :
:

Структурная схема программной реализации регулятора:

Рис.11 :Структурная схема программной реализации регулятора
В программе контроллера необходимо выделить 2+n ячеек памяти, где n равно количеству элементов задержки.
Шаблон циклической программы выглядит следующим образом:



Выберем микроконтроллер ATmega32 – 8-и битный контроллер семейства AVR c тактовой частотой 16 МГц, что вполне достаточно, если учесть что большинство команд микроконтроллера выполняются за 1 такт, а частота дискретизации нашего регулятора составляет 0,0008с.
Анализируемая характеристика системы
По условию задания необходимо промоделировать зависимость ошибки в режиме движения от статического момента сопротивления.
Результаты моделирования представлены на рисунке 12.
В результате исследования можно сделать вывод, что увеличение статического момента сопротивления ведет к увеличению ошибки в режиме движения.
Рис.12: Зависимость ошибки в режиме движения от статического момента сопротивления
Выводы:
Выбранный двигатель относится к серии МИГ - высокомоментные двигатели с гладким якорем и возбуждением от постоянных магнитов. Допускают 10-кратную перегрузку по моменту. В данном случае двигатель недогружен. Это не очень хорошо, но вполне терпимо.
В качестве датчика выступает вращающийся трансформатор. Точность датчика является достаточно высокой и полностью удовлетворяет заявленным требованиям.
При анализе точности системы потребовался дополнительный коэффициент усиления.
Разработка и синтез регулятора позволили системе обрести устойчивость.
На заключительном этапе было проанализировано влияние статического момента сопротивления на ошибку в режиме движения.