

Фильтр нижних частот
ФНЧ – апериодическое звено. Расчёт фильтра ведётся из условия пульсации выходного напряжения не более 5%.


 ,
где
,
где
f - частота работы измерительного устройства на сельсинах.

Так
как
 ,
то выберем значения R
и C:
,
то выберем значения R
и C:
Пусть
С=1 мкФ, тогда

Электрическая схема:
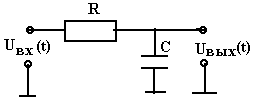
Рис.4: Электрическая схема ФНЧ.
Источники питания
Для питания измерительного устройства на сельсинах необходим источник питания с частотой 400 Гц и напряжением 110 В.
Для питания усилителя мощности необходим источник постоянного тока с напряжением 10В
Анализ динамики исполнительного механизма
Рассчитаем параметры исполнительного двигателя для структурной схемы.
Индуктивность якоря:

Электромагнитная постоянная времени:
Коэффициент момента:

Коэффициент противо-ЭДС:

Жесткость механических характеристик:

Механическая постоянная времени двигателя в режиме х.х.:

Механическая постоянная времени двигателя под нагрузкой:
 ,
где
,
где


Анализ динамики:
Соотношение
постоянных времени
 :
:
В
режиме хх:

Под
нагрузкой

В
режиме хх при
 разгон описывается
апериодическим звеном 2-го порядка:
разгон описывается
апериодическим звеном 2-го порядка:
 ,
где
,
где
 -
постоянные времени эквивалентных
апериодических звеньев
-
постоянные времени эквивалентных
апериодических звеньев


Перерегулирование при разгоне не превышает 5%. Время разгона можно приближённо оценить по формуле:

В режиме разгона с нагрузкой при описание разгона и нахождение постоянных времени производится аналогично.


Перерегулирование при разгоне не превышает 5%. Время разгона можно приближённо оценить по формуле:

Структурная схема. Анализ точности
По рассчитанным параметрам составим структурную схему и проанализируем точность, выберем предварительный усилитель для обеспечения заданной точности, если он необходим.
Структура системы имеет следующий вид:

Рис.5:Структурная схема системы
После выбора основных элементов и разработки схемы проверить систему на точность ,удовлетворяет ли она заданной точности. Точность обычно оценивают величиной ошибки в установившемся режиме работы. Она определяется несколькими факторами и может быть представлена в виде трех составляющих:

 -
методическая ошибка, вызванная действием
задающего сигнала;
-
методическая ошибка, вызванная действием
задающего сигнала;
 -
методическая ошибка, вызванная действием
возмущений;
-
методическая ошибка, вызванная действием
возмущений;
 -
инструментальная ошибка, обусловленная
погрешностями элементов системы;
-
инструментальная ошибка, обусловленная
погрешностями элементов системы;
 -
максимально допустимая величина ошибки.
-
максимально допустимая величина ошибки.
Для оценки методических ошибок удобно воспользоваться структурной схемой и передаточными функциями по ошибке.
Передаточные функции системы:



Передаточные функции по ошибке от входного сигнала:

 ,
где
,
где
 -
коэффициент усиления разомкнутой
системы.
-
коэффициент усиления разомкнутой
системы.
Если
передаточную функцию по ошибке представить
в виде ряда по возрастающим степеням
 ,
сходящегося при
,
сходящегося при
 ,
,

то коэффициенты этого ряда будут определять отдельные составляющие ошибки, обусловленные величиной сигнала, скоростью его изменения, ускорением и т.д., и называются коэффициентами ошибок по положению, по скорости, по ускорения и т.д.
Вычислим коэффициенты путем деления полиномов передаточной функции:

Передаточная функция по ошибке от возмущения:


Вычислим коэффициенты путем деления полиномов передаточной функции:

Из этих выражений видим, что система обладает астатизмом первого порядка по задающему сигналу и является статической по возмущению (моменту нагрузки).
Условие
обеспечения заданной точности
 позволяет рассчитать необходимый
коэффициент усиления системы при
отработке скачка скорости с постоянным
моментом нагрузки:
позволяет рассчитать необходимый
коэффициент усиления системы при
отработке скачка скорости с постоянным
моментом нагрузки:

откуда





Необходим дополнительный усилитель. Возьмем коэффициент дополнительного усиления Кд1 =103, тогда:
