

2.3. Планы скоростей рычажного механизма
Планы скоростей механизма строят на основе аналитических зависимостей векторных уравнений, которые записывают для каждой структурной группы в порядке их присоединения начальному звену. В табл. 2.1 показаны векторные уравнения и планы скоростей для структурных групп 2-го класса 1-5 видов.
Пример выполнения кинематического анализа методом планов
Для определения скоростей используем графоаналитический метод, т.е. аналитически определим скорость точки В:
![]() м/с.
м/с.
Табл. 2.1
Вид |
Расчетные схема структурных групп |
Векторные уравнения |
План скоростей |
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
|
5 |
|
|
|
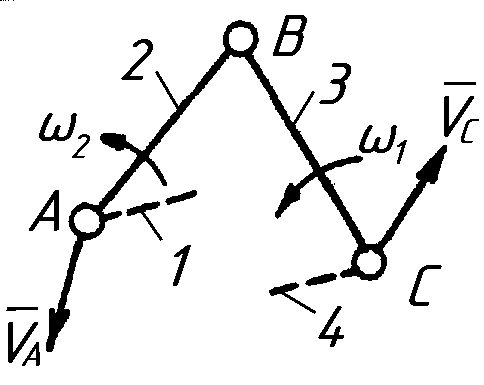






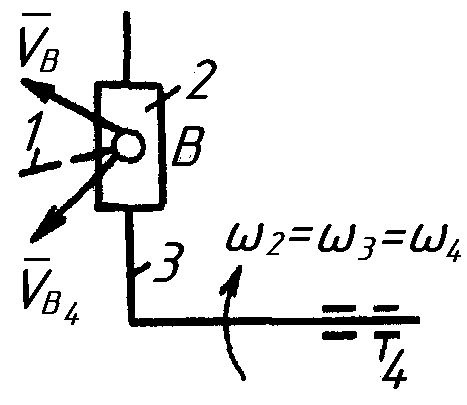

Рассмотрим
структурную группу 2-3, в которой
![]() и
и
![]() поскольку звенья 1-2 и 2-3 соединены
шарнирно:
поскольку звенья 1-2 и 2-3 соединены
шарнирно:
![]()
где
![]() =
4,2 м/с;
=
4,2 м/с;
![]() =
0, т.к. точка
=
0, т.к. точка
![]() расположены на неподвижном звене;
расположены на неподвижном звене;
![]() звену
звену
![]() ,
вращательная скорость т.
,
вращательная скорость т.
![]() вокруг
вокруг
![]() ;
VС3С0
звену 0, поступательная скорость т.
;
VС3С0
звену 0, поступательная скорость т.
![]() по звену 0.
по звену 0.
Решение векторных уравнений осуществим графически, т.е. построим план скоростей (рис. 2.4. Приложение Б). Для этого выбираем масштабный коэффициент скоростей:
![]() =
0,05 м ∙ c-1
/мм,
=
0,05 м ∙ c-1
/мм,
где
![]() - отрезок, выражающий скорость т.
- отрезок, выражающий скорость т.
![]() ,
принимаем равным
=
84 мм.
,
принимаем равным
=
84 мм.
Решим графически
систему векторных уравнений для т.
,
т.е. из точки
![]() проводим линию
,
а из полюса - линию
звену 0.
проводим линию
,
а из полюса - линию
звену 0.
На пересечении
линий получим точку
![]() и соответственно скорости:
и соответственно скорости:
![]() =
86∙ 0,05 = 4,3 м/с,
=
86∙ 0,05 = 4,3 м/с,
![]() = 42 ∙ 0.05 = 2,1 м/с.
= 42 ∙ 0.05 = 2,1 м/с.
Определим угловую скорость шатуна
![]() =
=
![]() =
17,5 рад/с.
=
17,5 рад/с.
Угловая скорость направлена в сторону относительной скорости.
Определим скорость
центра тяжести звена S2
методом подобия. Точка S2
принадлежит звену ВС и делит звено
в заданном соотношении
![]() .
Относительные скорости при этом будут
пропорциональны отношению
.
Относительные скорости при этом будут
пропорциональны отношению
![]() откуда
откуда
![]() =
42 ∙
=
42 ∙![]() = 28 мм.
= 28 мм.
Отложим отрезок bs2 на линии bс и точку S2 соединим с полюсом.
Скорость центра тяжести S2 определяется выражением
![]() =
=![]()
![]() = 83∙
0,05 = 4,15 м/с.
= 83∙
0,05 = 4,15 м/с.
Аналогично определяется скорость т. S1
 ;
;
![]() =
84∙
=
84∙![]() =
36 мм;
=
36 мм;
![]() ∙
mv
= 36 ∙ 0,05 = 1,8
м/с.
∙
mv
= 36 ∙ 0,05 = 1,8
м/с.
Планы ускорений как и планы скоростей, строятся на основе векторных уравнений, составленных для каждой структурной группы (табл.2.2). Структурные группы следует рассматривать в соответствии с порядком их присоединения к основному механизму.
Табл. 2.2.
Вид |
Расчетные схема структурных групп |
Векторные уравнение |
План ускорений |
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
|
5 |
|
|
|














Для определения ускорения точек строим план ускорений, который строится аналогично плану скоростей. Ускорения т. В1:
![]() ;
;
![]() ,
,
где
![]() = 602
∙ 0,07 =252 м/с2,
= 602
∙ 0,07 =252 м/с2,
![]() = 80
∙ 0,07 = 5,6 м/с2
.
= 80
∙ 0,07 = 5,6 м/с2
.
Выберем масштабный
коэффициент![]() мс-2/мм
и строим план ускорений (рис. 2.5. Приложение
Б)
мс-2/мм
и строим план ускорений (рис. 2.5. Приложение
Б)
Отрезок плана ускорений, выражающий точку В:
![]() =
=
![]() = 100,8 мм,
= 100,8 мм,
![]() =
=
![]() = 2,24 мм.
= 2,24 мм.
Определим ускорение т. С путем графического решения системы векторных уравнений:

где
![]() ;
;
![]() -
известно и определяется вектором
-
известно и определяется вектором
![]() ;
;
![]() =101
∙ 2,5 = 252,5 м/с2;
=101
∙ 2,5 = 252,5 м/с2;
![]() 17,52
∙ 0,12 =36,75 м/с2
- нормальное ускорение во вращательном
движении т. С вокруг В;
17,52
∙ 0,12 =36,75 м/с2
- нормальное ускорение во вращательном
движении т. С вокруг В;
![]() -
кариолисово ускорение равно 0, при
неподвижной направляющей;
-
кариолисово ускорение равно 0, при
неподвижной направляющей;
![]() -
тангенциальное ускорение во вращении
т. С
вокруг В,
направлено
СВ;
-
тангенциальное ускорение во вращении
т. С
вокруг В,
направлено
СВ;
![]() -
относительное ускорение поступательного
движения звена 3 по звену 0.
-
относительное ускорение поступательного
движения звена 3 по звену 0.
На пересечении этих направлений получим ускорение точки С2,3:
![]() 30
× 2,5 = 75 м/с2;
30
× 2,5 = 75 м/с2;
![]() 90
×2.5 = 225 м/c2;
90
×2.5 = 225 м/c2;
![]() 30
× 2,5 = 75 м/с2.
30
× 2,5 = 75 м/с2.
Отрезок нормального ускорения
![]() мм
мм
откладывается от точки C к В звену ВС.
Определим угловое ускорение звена 2
![]() =
=![]() =
1875 рад/с2.
=
1875 рад/с2.
Направление
углового ускорения
![]() определяется тангенциальной составляющей
определяется тангенциальной составляющей
![]() линейного ускорения.
линейного ускорения.
Используя метод подобия определим ускорение центра тяжести звена S1
![]() ;
;
![]()
![]() = 43,2 мм;
= 43,2 мм;
![]() 43,2
∙ 2,5= 108 м/с2.
43,2
∙ 2,5= 108 м/с2.
Используя метод подобия определим ускорение центра тяжести звена 2
![]() ,
откуда
=
91 ∙
,
откуда
=
91 ∙![]() = 60,67 мм.
= 60,67 мм.
Отложим отрезок
![]() на линии
на линии
![]() плана ускорений и соединим с полюсом.
плана ускорений и соединим с полюсом.
Тогда ускорение т. S2 определяется зависимостью
![]() =
60,67 ∙ 2,5= 151,67 м/с2.
=
60,67 ∙ 2,5= 151,67 м/с2.