

Глава 13 система вращения
§ 1. Назначение, состав и технические данные
Система вращения предназначена для вращения прицепа В1 и установки его на любой заданный азимут.
Состав
В состав системы входят (рис. 13.1):
— блок управления режимами систем качания и вращения ЛЦ-09;
— блок задания секторного режима работы ВЗ-01;
— блок суммирования и усиления сигналов управления ЛУВ-01;
— блок усиления сигналов по мощности ЛМП-01;
— исполнительный двигатель постоянного тока с независимым возбуждением со встроенным тахогенератором ПБСТ-62;
— редуктор вращения кабины ЛВР-01;
— блок азимутальных датчиков ДФ-09;
— блок управления маркером по азимуту и дальности ДЛ-06;
— выключатели ЛМП-01, ВРАЩЕНИЕ блока ЦП-05 и ВРАЩЕНИЕ шкафа ЦМ-23.
Технические данные
1. Статическая ошибка системы вращения в режиме ручного управления — не более ±20'.
2. Чувствительность системы в режиме ручного управления — не более ±10'.
3. Скорость вращения кабины в режимах секторного обзора 54 и 135 град/мин.
4. Динамическая ошибка в секторном режиме при скорости 54 град/мин — не более 1,5°, при скорости 135 град/мин — не более 2°;
5. Динамическая ошибка в режиме ручного управления от блока ДЛ-06 при малой скорости вращения — не более ±30';
6. Динамическая ошибка в режиме кругового синхронного вращения — не более ± 1°;
7. Время отработки угла рассогласования 170° — не более 9 с;
8. Максимальный выбег кабины при установке на любой заданный азимут — не более 5°;
9. Число колебаний кабины около заданного азимута при отработке любого угла рассогласования до полной ее остановки — не более двух полных колебаний;
10. Скорости независимого кругового вращения 6±0,3 об/мин, 10±0,5 об/мин;
11. Скорости синхронного кругового вращения 4±0,2 об/мин; 6±0,3 об/мин.
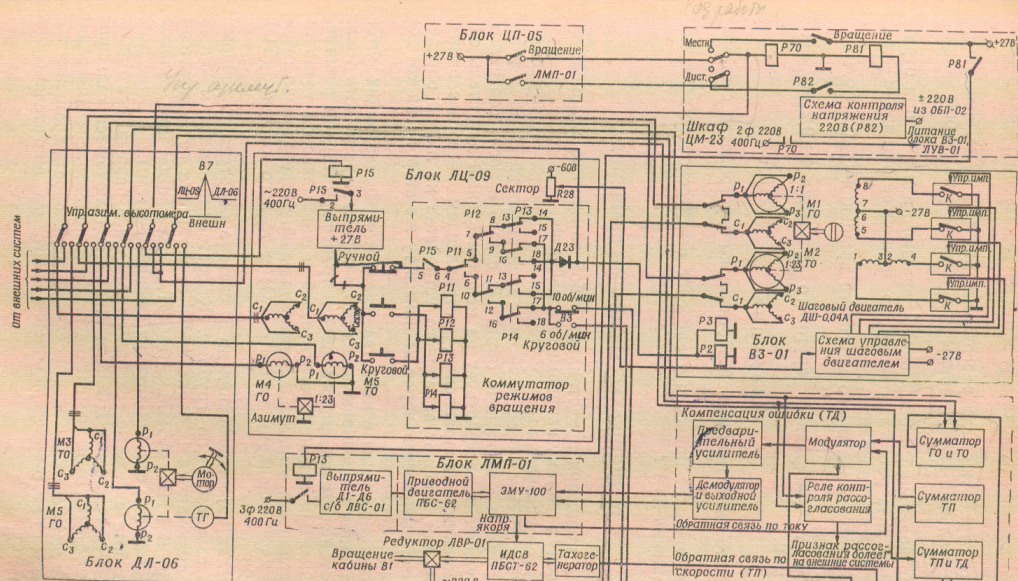
Рис. 13.1. Функциональная схема системы вращения.
Задание
1. Найдите на материальной части блоки и устройства системы вращения.
2. К чему может привести увеличение статической ошибки системы вращения до Г?
§ 2. Принцип работы системы вращения
Система вращения представляет собой замкнутую нелинейную двухканальную систему непрерывного действия.
Угол рассогласования между положением кабины и положением задающего элемента преобразуется в электрический сигнал, который суммируется с сигналами обратных связей и после соответствующего усиления воздействует на исполнительный двигатель системы вращения в направлении, устраняющем рассогласование. Таким образом, поворот задающего устройства на любой определенный угол вызывает поворот кабины в ту же сторону на тот же угол.
В системе вращения в качестве элементов, измеряющих уголрассогласования и преобразующих его в сигнал переменного тока, используются сельсины, работающие в трансформаторном режиме. Для обеспечения заданной статической и динамической точности система вращения выполнена двухканальной. Передаточное отношение между сельсинами грубого (ГО) и точного отсчета (ТО) равно 1 : 23.
При углах рассогласования до 5° система работает по точному каналу, а свыше 5° — по грубому. К сельсин - приемникам блока ДФ-09 подключаются (в зависимости от установки переключателя блока ДЛ-06 УПР. АЗИМ. ВЫСОТ.) сельсин - датчики блоков ЛЦ-09, ДЛ-06 или сельсин - датчики внешней системы.
При работе в режиме секторного обзора в разрыв статорных цепей сельсинов блоков ДФ-09 и ЛЦ-09 подключаются сельсины блока ВЗ-01. При этом изменение углового рассогласования задается этими дифференциальными сельсинами, скорость вращения которых зависит от скорости вращения шагового двигателя блока ВЗ-01.
Для управления шаговым двигателем используется схема управления, обеспечивающая возможность плавной регулировки величины сектора в пределах 10—170° и задание двух скоростей вращения дифференциальных сельсинов — 54 и 135°/мин. Реверсирование двигателя на границах сектора осуществляется изменением очередности запитывания обмоток шагового двигателя.
Биссектриса сектора задается угловым положением сельсин - датчиков блока ЛЦ-09 с помощью ручки АЗИМУТ, на блоке ЛЦ-09.
В режиме кругового обзора в качестве задающего напряжения используется напряжение с блока ЛУВ-01. Напряжение с сельсин - датчиков блока ЛЦ-09 не используется.
Напряжение рассогласования усиливается и преобразуется в с блоке ЛУВ-01 и подается в блок ЛМП-01, а затем на исполнительный двигатель системы вращения, который поворачивает кабину и роторы сельсин - трансформаторов блоков ДФ-09 до согласованного положения с сельсин - датчиками.
Устойчивость и качество работы следящей системы обеспечиваются напряжением обратной связи по скорости, которое снимается с тахогенератора, встроенного в исполнительный двигатель системы, или с тахогенератора внешней системы. С блока ЭМУ-100 снимается обратная связь по току.
Сигналы обратных связей поступают в блок ЛУВ-01, где суммируются с сигналами рассогласования.
Для проверки режимов работы блоков ЛУВ-01 и ВЗ-01 и регулировки системы вращения предусмотрено местное включение системы со шкафа ЦМ-23 без включения блока ЛМП-01.