

2)Физический маятник.
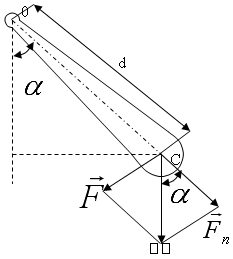
Физическим маятником называется твердое тело, колеблющееся относительно неподвижной горизонтальной оси (оси подвеса), не проходящей через центр тяжести. При небольших углах отклонения (α-мал) физический маятник совершает гармонические колебания. Сила, возвращающая маятник в положение равновесия, представляет собой составляющую силы тяжести, приложенную в точке С:
F=mg·sinα
Момент этой силы относительно оси O равен:
M=-Fl=-mgd·sinα,
где l=d·sinα - плечо силы F относительно оси O, знак минус соответствует тому, что момент M стремится вернуть маятник в положение равновесия, аналогично квазиупругой силе.
В соответствии с уравнением динамики вращательного движения:
M=Iε,
где ε=d2α/dt2 - угловое ускорение, I - момент инерции маятника относительно оси О. Получаем:
I·d2α/dt2=-mgd·sinα (9)
Ограничившись малыми колебаниями (sinα~α), после преобразований получаем уравнение (9) в виде:
(d2α/dt2) + (mgdα/I)=0 (10)
Сравнив выражения (5) и (10) мы видим их математическую аналогию, что позволяет записать выражения для циклической частоты и периода колебаний физического маятника:
ω0=√(mgd/I) (11)
T0=2π/ω0=2π√(I/mgd), (12)
где d - расстояние от центра тяжести до оси вращения.
Билет 4.
1)Движение центра масс твердого тела
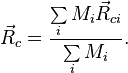
Центр масс твёрдого тела – геометрическая точка,, положение которой характеризует распределение масс в теле или механической системе. Координаты Ц. и. определяются формулами :
![]() .
.
Для тела при непрерывном распределении масс:
 ,где mk - массы
материальных точек, образующих
систему; xk,
yk,
zk-
координаты этих точек; М
=Smk-
масса системы; r( х,
у, z) - плотность; V-объём.
,где mk - массы
материальных точек, образующих
систему; xk,
yk,
zk-
координаты этих точек; М
=Smk-
масса системы; r( х,
у, z) - плотность; V-объём.
Для
системы тел
![]() ,
где
,
где ![]() — радиус-вектор центра
масс,
— радиус-вектор центра
масс, ![]() —
радиус-вектор i-й
точки системы,
—
радиус-вектор i-й
точки системы, ![]() — масса i-й
точки.
— масса i-й
точки.
Для
случая непрерывного распределения
масс:![]()
![]() где
где ![]() —
суммарная масса системы,
—
суммарная масса системы, ![]() —
объём,
—
объём, ![]() —
плотность. Центр масс, таким образом,
характеризует распределение массы по
телу или системе частиц. Можно показать,
что если система состоит не из материальных
точек, а из протяжённых тел с массами
—
плотность. Центр масс, таким образом,
характеризует распределение массы по
телу или системе частиц. Можно показать,
что если система состоит не из материальных
точек, а из протяжённых тел с массами ![]() ,
то радиус-вектор центра масс такой
системы
,
то радиус-вектор центра масс такой
системы ![]() связан
с радиус-векторами центров масс
тел
связан
с радиус-векторами центров масс
тел ![]() соотношением[2]:
соотношением[2]:
 Понятие
Ц. и. отличается от понятия центра тяжести
тем, что последнее имеет смысл только
для твёрдого тела, находящегося в
однородном поле тяжести; понятие же Ц.
и. не связано ни с каким силовым полем
и имеет смысл для любой механич. системы.
Для твёрдого тела положения Ц. и. и центра
тяжести совпадают. При движении механич.
системы её Ц. и. движется так, как двигалась
бы материальная точка, имеющая массу,
равную массе системы, и находящаяся под
действием всех внеш. сил, приложенных
к системе.
При поступательном движении
все точки твердого тела движутся так
же, как и центр масс (по таким же
траекториям), поэтому для описания
поступательного движения достаточно
записать и решить уравнение движения
центра масс. При
поступательном движении
все точки твердого тела движутся так
же, как и центр масс (по таким же
траекториям), поэтому для описания
поступательного движения достаточно
записать и решить уравнение движения
центра масс.
Понятие
Ц. и. отличается от понятия центра тяжести
тем, что последнее имеет смысл только
для твёрдого тела, находящегося в
однородном поле тяжести; понятие же Ц.
и. не связано ни с каким силовым полем
и имеет смысл для любой механич. системы.
Для твёрдого тела положения Ц. и. и центра
тяжести совпадают. При движении механич.
системы её Ц. и. движется так, как двигалась
бы материальная точка, имеющая массу,
равную массе системы, и находящаяся под
действием всех внеш. сил, приложенных
к системе.
При поступательном движении
все точки твердого тела движутся так
же, как и центр масс (по таким же
траекториям), поэтому для описания
поступательного движения достаточно
записать и решить уравнение движения
центра масс. При
поступательном движении
все точки твердого тела движутся так
же, как и центр масс (по таким же
траекториям), поэтому для описания
поступательного движения достаточно
записать и решить уравнение движения
центра масс.
2)
Энергия гармонического осциллятора.
Гармонический
осциллятор (в классической
механике) — система,
которая при смещении из положения
равновесия испытывает
действие возвращающей силы F,
пропорциональной смещению x (согласно закону
Гука):
![]() ,
где k — коэффициент
жёсткости системы.
,
где k — коэффициент
жёсткости системы.
Во
время колебательных процессов происходит
периодическое превращение потенциальной
энергии системы в кинетическую. Например,
отклонив математический маятник в
сторону и, следовательно, подняв его на
высоту h,
ему сообщают потенциальную энергию ![]() .
Она полностью переходит в кинетическую
энергию движения
.
Она полностью переходит в кинетическую
энергию движения ![]() ,
когда груз проходит положение равновесия
и скорость его максимальна. При колебаниях
пружинного маятника кинетическая
энергия движения груза переходит в
потенциальную энергию деформированной
системы. Величина полной энергии
колеблющейся системы в любой момент
времени равна сумме ее кинетической и
потенциальной энергии:
,
когда груз проходит положение равновесия
и скорость его максимальна. При колебаниях
пружинного маятника кинетическая
энергия движения груза переходит в
потенциальную энергию деформированной
системы. Величина полной энергии
колеблющейся системы в любой момент
времени равна сумме ее кинетической и
потенциальной энергии:
![]()
или
|
|
(7.2) |
|
|
|
||
|

![]() .
.
Учитывая,
что ![]() и
подставив выражения для
и
подставив выражения для ![]() и
и ![]() ,
получим:
,
получим:
![]() .
.
То есть полная энергия системы, совершающей колебания, пропорциональна ее массе, квадрату амплитуды и квадрату собственной частоты. Так как силы, действующие на колеблющуюся частицу, являются консервативными, то ее механическая энергия остается постоянной. В процессе же колебаний происходит превращение кинетической энергии в потенциальную и обратно.
На
рис. 7.3 приведен график зависимости
потенциальной энергии от координаты
частицы. С ростом x уменьшается
кинетическая энергия и увеличивается
потенциальная. Максимального значение
потенциальная энергия достигает в
поворотных точках ![]() ,
при этом кинетическая энергия равна
нулю. Среднее за период значение
кинетической энергии равно среднему
за период значению потенциальной
энергии.
,
при этом кинетическая энергия равна
нулю. Среднее за период значение
кинетической энергии равно среднему
за период значению потенциальной
энергии.
Билет 5.