

Определение качества управления программным путем
Как следует из предшествующего материала качество СУ характенризуется ее реакцией на входной сигнал заданного вида. Так как входные сигналы, действующие на систему заранее неизвестны, то о качестве системы по реакции на типовой тестовый входной сигнал. В системе второго порядка, изображенной на рис. 25 выходной сигнал лпределяется выражением (в виде изображения по Лапласу):


Рис. 25. Схема СУ одноконтурной системы второго порядка
Рассмотрим использование тестового сигнала импульс на основе функции step. Реакция системы на импульсный сигнал является производной по времени от ее реакции на ступеньку. Такая реакция вычисляется с помощью функции impulse, которую схематично можно изобразить как на рис. 26.
 Рис.
26. Схема реализации функции impulse
Рис.
26. Схема реализации функции impulse
С помощью рассматриваемой функции step можно построить листинг скрипт-программы, как это изображено на рис. 27.

Рис. 27. Листинг скрипт-программы для системы второго порядка
На основе выпоняемой программы получается график зависимости, как это изображено на рис. 28.

Рис. 28. Графическая иллюстрация реакции системы второго порядка на ступенчатый входной сигнал.
Задание 17. Выполните операции выполнения графической визуализации реакции системы второго порядка на ступенчатый входной сигнал.
Рассмотрим пример реакции второго порядка на импульсный входной сигнал, когда n=1, что эквивалентно вычислению реакции системы в функции от nt. Такой прием позволяет получать графики для любых n > 0, как отображено в скрипт программе на рис. 29.

Рис. 29. Листинг реакции системы второго порядка на импульсный входной сигнал
В результате выполнения этой программы получаются следующие графики (рис. 30):

Рис. 30. Графическая иллюстрация реакции системы второго порядка на импульсный входной сигнал.
Задание 18. Выполните операции выполнения графической визуализации реакции системы второго порядка на импульсный входной сигнал.
Рассмотрим пример определения реакции системы на произвольный входной сигнал заданного вида. Для этого используется функция lsim, способ применения которой проиллюстрирован на рис. 31.
 Рис.
31. Схема реализации функции lsim
Рис.
31. Схема реализации функции lsim
На рисю. 32 представлен пример технической реализации управления рулевым механизмом подвижного устройства в виде структурной схемы.

Рис. 32. Схема СУ рулевым механизмом подвижного устройства
Для данного объекта реулирования входной сигнал является линейным, поэтому установившаяся ошибка составляет следующее значение:
ess = A/Kv,
где Kv = К2К. При этом влияние коэффициента усиления регулятора К2 на установившуюся ошибку можно проследить из уравнения: чем больше К2, тем меньше установившаяся ошибка. Реакцию замкнутой системы на линейный входной сигнал можно вычислить с помощью функции lsim. На рис. 33 приведен листинг программы в реализации заданной функции lsim.

Рис. 33. Листинг реакции системы на произвольный входной сигнал заданного вида
В результате исполнения этой программы получается следующая графическая зависимость (рис. 34):
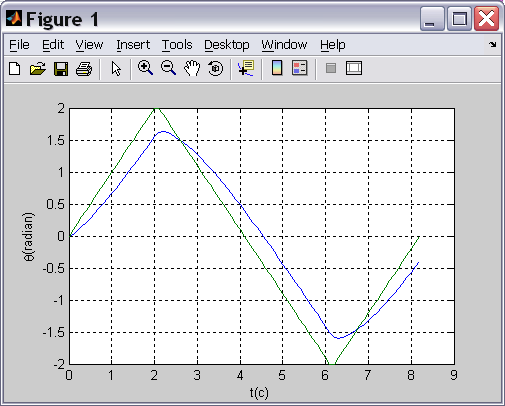
Рис. 34. Графическая зависимость результатов реакции системы на произвольный входной сигнал заданного вида
Задание 19. Выполните операции вычисления результатов реакции системы на произвольный входной сигнал заданного вида.