

Основні напрямки енергозбереження. Нетрадиційні джерела енергії
Тема 6. (Продовження). Енергетичні ресурси. Споживання енергетичних ресурсів у процесі виконання транспортної роботи. Методи енергозбереження.
Основні питання лекції:
1. Режими руху транспортних засобів:
буксування;
рекуперативне гальмування;
юз.
2. Модернізація електричних машин і апаратів.
Основний зміст лекції:
Методи зниження витрат енергії. Застосування рухомого складу з імпульсним регулюванням, раціоналізація маршрутів, зміна умов експлуатації. Керування пасажиропотоками, заходи щодо підвищення швидкості сполучення.
1. Режими руху транспортних засобів:
буксування;
рекуперативне гальмування;
юз;
нерівномірність струморозподілу в силових колах тягових двигунів.
Розглянемо витрати енергії при буксуванні рухомих одиниць як фактор ресурсовитратності. Ефективність роботи транспортних засобів в значній мірі визначається рівнем зчеплення коліс з дорожнім покриттям або рейками. На відміну від магістрального транспорту, де питанню зчеплення присвячена велика кількість досліджень, на міському електротранспорті такі дослідження вкрай обмежені [63, 176, 193, 194, 208 - 211]. Справа в тім, що для локомотивів степінь використання сили зчеплення є необхідним фактором ефективності перевезень, а на міському електротранспорті процеси надлишкового ковзання не мають суттєвого значення хоча б тому, що зчіпна вага рухомої одиниці є випадковою величиною, а вимоги комфортності та мінливість дорожньої ситуації вимагають реалізації сил тяги та гальмування у дуже широкому діапазоні. У разі виникнення надлишкового ковзання водій рухомої одиниці завжди може скористуватись нижчими позиціями контролера управління, тому питання зчеплення має безпосередній стосунок лише до безпеки руху, бо при юзі під час гальмування збільшуються гальмівні шляхи.
Але при цьому залишається поза увагою енергетичний аспект цього питання, який однак для локомотивної тяги не виділяється в суттєвий, а для рухомого складу міського електротранспорту у деякі періоди року стає чи не визначальним. Співставлення обсягів транспортної роботи з витратами енергії по районах живлення вказують на те, що в певні дні, коли спостерігається масове попадання вологого листя або суцвіть дерев на колію, що викликає масове буксування вагонів, питомі витрати енергії значно зростають [65, 181, 208]. Таким чином можна констатувати, що є об'єктивна потреба впливати на причини підвищеної енерговитратності при буксуванні як складової частини ресурсовитратності.
Надлишок поздовжньої сили колеса над силою тертя йде на підвищення кінетичної енергії обертання колісної пари, тягової передачі та якоря тягового двигуна. Оскільки сила сухого тертя при збільшення швидкості ковзання зменшується, кутове прискорення колісної пари зростає. Але з другого боку поздовжня сила колеса визначається тяговою чи гальмівною характеристиками, за якими момент якоря тягового двигуна залежить від частоти його обертання, і зменшується при її зростанні в тяговому режимі, та уповільненні в гальмівному. Таким чином кутове прискорення колісної пари збільшується не безмежно, і при досягненні рівності між силою на колесі та силою сухого тертя реалізується максимальна швидкість ковзання. Якщо протягом процесу надлишкового ковзання умови контактування коліс з рейками поліпшуються, сила сухого тертя збільшується і починає перевищувати силу на колесі. Внаслідок цього відбувається зміна знаку кутового прискорення колісної пари і природне затухання надлишкового ковзання. Ці процеси добре відомі і мають спеціальні назви - буксування в режимі тяги та юз в режимі гальмування.
Максимальне прирощення швидкості буксуючої колісної пари ΔVб головно визначається максимальною величиною швидкості надлишкового ковзання Vковз.max, після досягнення якої внаслідок поліпшення умов зчеплення з-за очищення бандажів спостерігається зменшення швидкості ковзання аж до нуля. За цей час поступальна швидкість рухомої одиниці зросте на ΔVв. Слід також прийняти до уваги, що умови контакту бандажів з рейками змінюються по довжині колії, тому крім ефекту абразивного очищення бандажів припинення буксування обумовлюється збільшенням коефіцієнту сухого тертя.
Загальні витрати електроенергії за час буксування складаються з споживання її небуксуючою колісною парою і буксуючою. При цьому одна частина енергії йде на надлишкове тертя з-за надмірного обертового руху колісної пари та пов'язаних з нею обертових частин, друга - на рух. Отже, визначити втрати енергії при буксуванні можна, якщо буде відома часова функція швидкості ковзання та залежна від неї сила сухого тертя.
Потреба у теоретичному визначенні залежностей втрат енергії при буксуванні обумовлена необхідністю відповіді принаймні на два запитання: чи складають ці втрати величину, що економічно виправдовує постановку питання про примусову ліквідацію виниклого буксування, а при ствердній відповіді - що є більш ефективним для запобігання цих втрат - механічне очищення колій від опалого листя та інших забруднень, або застосування систем розпізнавання початку буксування та примусового його припинення.
Розглянемо рівняння буксування. Як це традиційно прийнято в дослідженнях буксування на магістральному транспорті, частота обертання якоря тягового двигуна, обертових частин редуктора та самої буксуючої колісної пари приводяться до швидкості поступального руху Vб, так що при русі вагону зі швидкістю Vв швидкість надлишкового ковзання дорівнює:
![]()
Сумарний момент інерції обертових частин приводиться до еквівалентної маси mе виходячи з рівності кінетичних енергій поступального та обертального руху.
Величина еквівалентної маси визначається через відомий для кожного типу рухомих одиниць коефіцієнт інерції γ, що є відношенням еквівалентних мас обертових частин до фізичної маси тари вагону вагою Gт:
![]()
Позначивши через Fт(Vб) силу тяги, та через Fковз.(Vковз.) силу сухого тертя при буксування, маємо основне рівняння:
![]()
Для визначення функції сили тяги скористаємося запропонованим проф. Д.К. Міновим поняттям групової тягової характеристики, яка встановлює залежність сили тяги від суми поступальних швидкостей колісних пар, двигуни яких з'єднані послідовно [212]. У невеликому діапазоні швидкостей групова тягова характеристика добре апроксимується відтинком прямої, так що можна записати функції сили тяги через початкове значення в момент виникнення буксування F0 та кутовий коефіцієнт χ:
![]()
Очевидно, що при цьому береться до уваги випадок буксування тільки однієї колісної пари.
Функцію сили сухого тертя при надлишковому ковзанні у невеликому діапазоні швидкостей звичайно вважають лінійною і визначають через початкове значення сили тертя спокою Т0 перед початком буксування та кутовий коефіцієнт ρ:
![]()
Таким чином можна встановити усі, крім Vв, величини в основному рівнянні.
Для визначення швидкості поступального руху потрібно розв'язати рівняння руху у першій формі, приймаючи до уваги те, що масу вагону поступально рухають дві колісні пари тої групи, де нема буксування, одна колісна пара з другої групи двигунів, де є буксування, та буксуюча колісна пара, причому її силою тяги є сила сухого тертя при буксуванні. Як це робиться у звичайних рівняннях руху, приймається до уваги протилежно спрямована сума сил основного та додаткового опору W. Без великих втрат точності припустимо прийняти силу опору рухові постійною протягом процесу виникнення та припинення буксування, що дає змогу знехтувати квадратичним членом у формулі питомого основного опору. Таким чином матимемо два диференціальні рівняння першого порядку з двома невідомими Vковз. та Vв, об'єднавши які в одне рівняння другого порядку можна розв'язати.
Оскільки
механічна робота є добутком сили на
довжину ділянки, де ця сила реалізується,
після підстановки знайденої з розв'язання
швидкості ковзання маємо: ![]() (3.34)
(3.34)
Прийнявши до уваги к.к.д. електромеханічного перетворення, отримаємо електричні втрати від буксування.
Отже, запишемо систему рівнянь для випадку буксування однієї колісної пари вагону з вагою G та коефіцієнтом інерції обертових частин 1+γ
![]() (3.35)
(3.35)
Вилучивши з першого рівняння Vв та підставивши його до другого рівняння, отримаємо диференціальне рівняння другого порядку, якому відповідає характеристичне рівняння з коренями р1, р2:
![]()
При будь-яких значеннях початкових сил тяги та зчеплення та при будь-яких значеннях жорсткості групової тягової характеристики та характеристики сили зчеплення при буксуванні корені цього рівняння є дійсними та різними.
Як відомо, розв'язання диференціального рівняння другого порядку, якому відповідає характеристичне рівняння з різними коренями, є сумою експонент. Прийнявши до уваги початкові умови у вигляді початкового прискорення надлишкового ковзання:
![]() при t
= 0
при t
= 0
отримаємо розв'язання:
 (3.36)
(3.36)
Спростимо це вираження, розкладаючи експоненти в ряд та утримуючи перші члени:
 .
.
Таким чином матимемо можливість визначити витрати енергії на надлишкове ковзання:

де F0, T0 - сили тяги та зчеплення в момент початку буксування; χ, ρ - жорсткість групової тягової характеристики та жорсткість характеристики зчеплення; V - швидкість поступального руху; me - еквівалентна маса обертових частин.
Очевидно, що наведені формули дійсні для незмінних значень жорсткості групової тягової характеристики χ та жорсткості характеристики сили зчеплення ρ, тобто доти, доки зберігаються передумови їх лінеаризації. Насправді ж залежність сили на ободі коліс буксуючої колісної пари від суми швидкостей цієї та електрично з нею зв'язаної може вважатися лінійною у відносно невеликому діапазоні швидкостей. Як приклад, на рис. 3.9 подано тягову, відповідну групову характеристику колісної пари трамвайного вагону КТМ - 5М3 та графік зміни жорсткості χ.
Нерівномірність струморозподілу в силових колах тягового електрообладнання. На основі виконаних особисто автором та під його керівництвом теоретичних та експериментальних досліджень [192, 211 - 219] визначено вплив нерівномірності струморозподілу в силових колах тягового електрообладнання рухомого складу МЕТ на перевитрати ресурсів і обґрунтовано напрямки підвищення тягових та гальмівних показників рухомої одиниці при роботі в зоні продуктивного ковзання (крипу).
Встановлено найбільш раціональні способи вирівнювання струмів в паралельних колах живлення тягових електродвигунів вагонів метрополітену та трамвая і розроблено вимоги до спеціальних технічних пристроїв для підвищення рівня ресурсозбереження, новизна яких захищена патентами, які розглянуті і пропонуються проектами ресурсозбереження з модернізації рухомого складу.

Рис. 3.9. Зміна жорсткості групової тягової характеристики
протягом розбігу трамвайного вагону КТМ - 5М3.
Проведено аналіз впливу як окремих факторів, так і їх дії у комплексі на нерівномірність струморозподілу між паралельними групами тягових електродвигунів. Дано оцінку впливу окремих факторів на нерівномірність струморозподілу і встановлено закономірність зміни її від струму двигуна.
Результати аналізу показали, що відхилення магнітних характеристик двигунів визначають граничну нерівномірність струморозподілу до 13,3% при повному полі тягових двигунів; 14,7; 17,8; 18,3 та 20,2% при ослабленні поля на першій-четвертій ступенях відповідно [192, 213, 215].
Відхилення опорів електричних кіл якоря приводить до виникнення нерівномірності струморозподілу до 1%, а опору кіл збудження до 2,5%. Причиною появи нерівномірності струморозподілу є також різниця в діаметрах бандажів колісних пар. Якщо поле послаблюється, то нерівномірність відповідно до ступенів є - 10,0; 11,7; 13,0 та 13,5% [330].
Загальна гранична нерівномірність струморозподілу визначалась з умовою, що всі супутні фактори мають максимальне значення в бік підвищення нерівномірності розподілу струмів між тяговими електродвигунами. Ці значення складають 37,5% при повному полі збудження та 40,0; 49,0; 51,6; 53,3% на послабленні поля з першої до четвертої ступені відповідно.
Рухомий склад метрополітену досить короткий час працює в статичних умовах. Як правило, йому більше властиві розгін та гальмування, тобто динамічні (перехідні) режими. У зв'язку з цим проведено теоретичні дослідження по визначенню граничної нерівномірності струморозподілу в режимах розбігу та гальмування. Числові значення факторів при цьому прийняті такими, як і в розрахунку для статичного режиму.
Результати розрахунків показали, що нерівномірність струморозподілу між паралельними групами тягових електродвигунів в перехідних режимах мало відрізняється (до 10%) віл нерівномірності струморозподілу в статичних умовах. Незначне зменшення струморозподілу в другому випадку зумовлено демпфіруючою дією індуктивностей двигунів та інерційними властивостями рухомого складу.
Гранична нерівномірність струморозподілу між паралельними групами тягових електродвигунів вказує на можливий максимальний діапазон перерозподілу струмів між двигунами. Для оцінки фактичної закономірності струморозподілу між двигунами вагонів метрополітену використано методи теорії ймовірності [192, 212, 213].
Зокрема проведено аналіз відхилення діаметрів бандажів колісних пар на всіх вагонах Харківського метрополітену та робочих характеристик їх тягових двигунів [212, 214]. Враховуючи те, що дійсні відхилення опору електричних кіл якорів і кіл збудження двигунів не перевершують 1 та 2% відповідно, їх варіації не враховувалися.
Оскільки магнітний потік та діаметр бандажів колісних пар є незалежними випадковими величинами, то щільність розподілу визначається залежністю: f(x,y) = f(x)·f(y).
Для вибору області, де будуть знаходитися параметри змін магнітного потоку та діаметрів бандажів при заданій імовірності 0,9, треба визначити інтеграл
![]()
Показано, що для вибраної ймовірності нерівномірність струмо-розподілу не перевищує 30,7% [213, 214].
Одержані теоретичні результати добре погоджуються з даними експериментальних досліджень, що проводились в метродепо "Московське" та "Салтівське" м.Харкова [192, 219].
Нерівномірність струморозподілу значно зменшує надійність роботи тягових двигунів. Збільшення різниці струму, що приводить до зміни частоти обертання якоря двигуна на 1%, приводить до двократного зростання відмов. Магнітні характеристики тягових двигунів відрізняються, в першу чергу, із-за відхилень в величині повітряних зазорів під головними полюсами. Результати розрахунків, що були виконані на ПЕОМ по розроблених автором алгоритмах, показали значну залежність різниці струмів від величини повітряних зазорів. Вона може досягати значень 250 А/мм. Відхилення індукції в 1,5 рази призводить майже до двократної зміни нерівномірності струморозподілу. При цьому неравномірність виникає не тільки в паралельних групах двигунів, але й в самих двигунах, що веде до небажаних наслідків і в першу чергу до перевитрат ресурсів при експлуатації міського електротранспорту. Розрахунок перевитрат електроенергії в залежності від рівня нерівномірності струморозподілу, який опубліковано в статті [192], вказує на необхідність розробки і впровадження проектів енергозабезпечення з модернізації електрообладнання рухомого складу.
Аналіз режиму рекуперації електричної енергії як складової ресурсозбереження
Найбільша складова потенціалу енергозбереження припадає на гальмівні втрати або на кінетичну енергію, яку має кожна рухома одиниця перед початком гальмування і яка в процесі гальмування витрачається на нагрівання резисторів гальмівного реостата та тертя у механічних гальмах. Нераціональність такого перетворення електроенергії була очевидна з перших кроків застосування електроприводу на колісному наземному транспорті, але були очевидні і технічні труднощі в реалізації ідеї викорис-тання перетвореної з кінетичної енергії рухомої одиниці електричної енергії для повторного споживання – так званої енергії рекуперації [220, 221 - 225].
Ці труднощі стосувалися як забезпечення умов переходу тягових двигунів у генераторний режим зі збереженням належного рівня електропротирушійної сили при зміні швидкості обертання якорів від будь-якого початкового значення до нуля, так і забезпечення умов споживання рекуперованої енергії. До появи на транспорті силової електроніки, тобто на рухомому складі з реостатно – контакторним регулюванням, вирішення проблеми забезпечення генераторного режиму тягових двигунів з рівнем електрорушійної сили, більшим за рівень напруги у контактній мережі та при підтриманні сталого моменту на якорі, по всьому діапазону швидкостей руху було принципово неможливо. Застосування двигунів з переважаючою намагнічувальною силою паралельних обмоток на МЕТ (трамвайні вагони РВЗ – 6, РВЗ – 6М, РВЗ – 6М2, тролейбуси МТБ – 82Д, ЗіУ-5), які дозволяли реалізувати рекуперативне гальмування до швидкості не менше 24 км/год., практично ніяких зрушень у енергоспоживанні не зробило, оскільки схемою керування передбачалося рекуперативне гальмування на позиціях розбігу, що спричиняє певні незручності для водіїв.
Крім того, навіть і невеликий відсоток можливої економії енергії не міг бути реалізований, оскільки імовірність реалізації потужності рекуперації та одночасного існування не меншої потужності споживання на одній секції або навіть на одному районі живлення є надзвичайно малою. Ось чому, незважаючи на надзвичайно привабливі результати теоретичного обчислення можливої економії енергії при застосуванні на рухомому складі електричного транспорту електронних перетворювачів, що передбачають рекуперацію до повної зупинки та інших накопичувачів проблема використання енергії рекуперації досі залишається не вирішеною [222 - 234]. На сьогоднішній день також не вирішено питання доцільності розміщення накопичувачів електроенергії: безпосередньо на транспортному засобі. або в системі тягового електропостачання [222 - 228]. В більшості наукових робіт не приділяється значної уваги на втрати в елементах силового приводу і системи електропостачання при оберненому перетворенні механічної енергії в електричну. Як було відмічено в п.3.2.2 тільки в контактній мережі та тягових підстанціях в номінальних режимах допускаються втрати електроенергії до 15 %. Дослідження, які були виконані на метрополітенах різних міст, показали, що при забезпеченні графіків руху поїздів для максимального споживання електроенергії рекуперації, енергія міжпоїздного обміну складає 8-13 %, надлишкова 5-1,5 % при енергії рекуперації 13-15 % загальних витрат на тягу поїздів.
Вільним від вказаних недоліків є акумулювання енергії рекуперації безпосередньо на рухомих одиницях з наступним її використанням при пусках. Можливість накопичення енергії з наступним її використанням практично доведена на багатьох видах транспорту, з яких найбільшою досконалістю відрізняються гіробуси швейцарської фірми “Ерлікон”, які здійснювали перевезення пасажирів протягом 15 років. До експериментальних зразків доведена розробка вагонів метрополітену з інерційним енергоакумулятором рекуперованої енергії, які пройшли випробування у Нью-Йорку; проведені експлуатаційні випробування автобусів ЛАЗ-695 з маховиком, міських автобусів Ikarus 556 з пневмоакумулятором у Ченстохові (Польща) [224, 225, 231].
Згідно з існуючою класифікацією, акумулювання енергії може бути у електричній, електрохімічній, пневматичній, механічній та тепловій формі [220, 221, 226 - 234]. Вибір тої чи іншої форми для застосування на МЕТ визначається крім таких очевидних критеріїв, як питома енергоємність (кількість енергії на одиницю маси енергоакумулятора), максимальна потужність, глибина розряду, максимальна кількість циклів “заряд-розряд”, також прийнятністю енергоакумулятора з точки зору безпеки для пасажирів та технічним рівнем експлуатаційних підприємств. З цих позицій використання теплових, зверхпровідних індуктивних накопичувачів, літій – хлорових електрохімічних високотемпературних акумуляторів, водневих електролізерів принаймні на найближчі десятиліття не матимуть перспективи. Прийнятними з точки зору наступництва техніки є очевидно електрохімічні низькотемпературні акумулятори, інерційні маховики та пневмоакумулятори.
Із співставлення характеристик енергоакумуляторів по показниках питомої енергоємності та питомої потужності (рис. 3.10) очевидна перевага механічних акумуляторів–маховиків над електрохімічними акумуляторами та енергоакумулюючими системами, що використовують стиснене повітря. Найбільш придатним з точки зору конструкції рухомого складу МЕТ є електрохімічні акумулятори, бо їх застосування потребує лише додаткового керованого інвертора для підтримання напруги заряджання батареї під час рекуперації та поступового підняття напруги під час споживання накопиченої енергії, у той час як механічні та пневматичні енергоакумулятори вимагають принципово відмінних конструктивних рішень ходових частин.

Рис. 3.10. Порівняння енергоакумуляторів різних видів
по питомій енергоємності Е/М та питомій потужності Р/М.
При існуючих зараз параметрах рухомого складу корисна енергія одного рекуперативного гальмування з урахуванням роботи з подолання опору рухові знаходиться в межах 1,0 – 2,5.106 Дж при максимальній початковій потужності у 200 – 450 кВт і тривалості рекуперації до 15 с. Розділивши корисну енергію рекуперації на показник питомої енергоємності та на показник питомої потужності, отримаємо приблизні значення маси додаткового устаткування для різних видів енергоакумуляторів. Так, для звичайних акумуляторів, що використовуються зараз на транспорті, додаткова маса сягає до 3000 кг, для срібно-сірчаних – до 1500 кг, для інерційних маховиків – до 800кг. Пневматичні акумулятори взагалі неспроможні забезпечити накопичення потрібного обсягу енергії, бо їх маса повинна бути співмірна з масою самого рухомого складу.
З цього логічно випливає пропозиція інвертувати енергію рекуперації до первинної мережі електропостачання, тобто перетворювати енергію постійного струму, що надходить від контактної мережі при рекуперації рухомої одиниці на секції, у енергію трифазного змінного струму напругою 600В на вторинній обмотці силового трансформатора тягової підстанції, який стає таким чином підвищувальним та передає енергію до мережі змінного струму 6 – 10 кВ. Ця ідея була вперше реалізована на тягових підстанціях залізниць, але внаслідок малої надійності ртутних перетворювачів, які на той час були єдиними керованими електронними приладами, широкого розповсюдження не знайшла.
З появою силових напівпровідникових приладів, а особливо керованих тиристорів, інвертування енергії рекуперації у первинну електромережу перейшло з розряду наукових проблем до розряду суто інженерних задач, зокрема на реверсивному електроприводі, де її впровадження дало значний економічний ефект. Принципова схема живлення електротранспорту при цьому виглядатиме так, як подано на рис. 3.11.

Рис. 3.11. Спрощена схема живлення секції на інверторній
тяговій підстанції
При наявності на районі живлення деякої кількості одиниць, з яких певна частина рекуперує, різниця потенціалів між позитивними та негативними шинами розподільчого пристрою постійного струму може стати більша за номінальну напругу на виході випрямляча, який внаслідок цього закривається, а інвертор – відкривається. Робота секції при цьому моделюється паралельними, за кількістю рухомих одиниць, ланцюгами з резисторами, що уособлюють опір силових кіл рухомих одиниць і опір контактно – кабельної мережі від струмоприймачів до шин тягової підстанції, та джерелами електропротирушійної сили, що імітують тягові двигуни у тяговому Ер.о. <Uк.м. та генераторному Ер.о.>Uк.м. режимах.
Відомо, що напруга на струмоприймачах рухомих одиниць дорівнює напрузі на шинах розподільчого пристрою постійного струму Uшв мінус втрати напруги з-за опору контактного проводу та кабелів ΔUТ, а напруга на шинах розподільчого пристрою постійного струму нижча від напруги холостого ходу випрямляльного агрегата на величину ΔUххв і при навантаженні більше 50 А є незмінною у всьому діапазоні навантажень (рис. 3.12). В інверторному режимі напруга на шинах того ж самого розподільчого пристрою Uші буде більша за напругу холостого ходу інвертора на величину ΔUххі. При протіканні струму рекуперації, тобто від струмоприймача до шин, втрати напруги від цього струму мають протилежний знак, і в разі перевищення струму рекуперації ІР над тяговим струмом ІТ напруга в контактній мережі Uкм перевищуватиме напругу на величину різниці втрат напруги плюс подвійне прирощення напруги холостого ходу.

Рис. 3.12. Залежність напруги в контактній мережі від струму при рекуперації
З цього випливає, що за наявності інвертування рекуперативної енергії у первинну мережу трифазного змінного струму напруга в контактній мережі повинна збільшуватися понад номінальною, що небезпечно як для електрообладнання одиниці, що рекуперує, так і для інших одиниць у даному районі живлення.
Отже, потрібно забезпечувати, щоб впровадження інвертування енергії рекуперації у первинну електромережу на МЕТ йшло паралельно з оснащенням рухомого складу електронними перетворювачами, здатними здійснювати рекуперативне гальмування до повної зупинки. Поки що цього не сталося, по-перше, з-за відсутності належного фінансування науково-дослідних та конструкторських робіт, а по друге, з-за відсутності донедавна ефективного технічного рішення компенсації підвищення напруги у контактних мережах при рекуперації. Тому необхідно розробляти проекти ресурсозбереження, що направлені на вдосконалення конструкції транспортних засобів та систем електропостачання і забезпечення відповідних умов експлуатації.
2. Модернізація електричних машин і апаратів.
Зменшення втрат ресурсів в електричних апаратах, в першу чергу, матеріальних, енергетичних, трудових досягається впровадженням проектів ресурсозбереження, що забезпечують вдосконалення магнітних силових систем та систем дугогасіння, елементів приводів, камер і контактів.
В дисертаційній роботі на основі аналізу стану ресурсозбереження, який забезпечується особливостями конструкції та умовами роботи електричних апаратів показано, що, в першу чергу, потрібно вирішити питання застосування модифікованих магнітних систем в апаратах захисту електрообладнання [206, 275], використання дугогасних камер із зменшеною енергією, що розсіюється, зменшення втрат енергії в процесі розмикання контактів комутаційних апаратів [205, 276, 277] та зносу контактних елементів [278, 279].
Як правило, пристрої дугогасіння електричних апаратів виготовляються у вигляді розімкнутої магнітної системи з котушкою або шиною розміщених в спеціальній камері.
В дугогасних камерах автоматичних вимикачів з номінальним значенням постійного струму більше 500 А використання котушок з струмопровідних шин приводить до збільшення габаритів за складності згинання шин і до значного підвищення витрат міді та втрат енергії в шині і в додаткових клемних з’єднаннях.
Усунути ці недоліки можна використанням прямої шини з багатовитковою магнітною системою (рис. 5. 13), параметри якої наведено в статті [206].
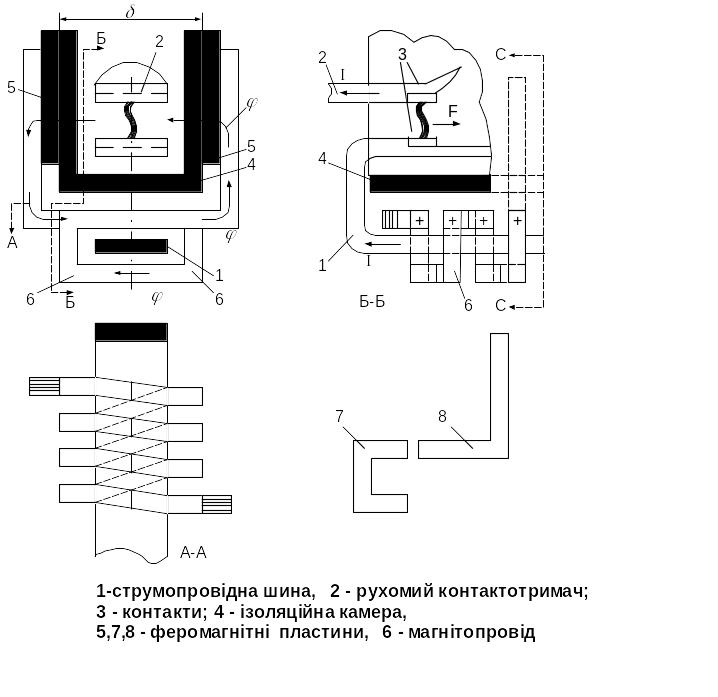
Рис. 5.13. Модернізація магнітних систем дугогасіння
Конструктивно до дугогасної камери входят: струмоведуча шина 1 з нерухомим контактом, рухомий контактодержач 2, контакт-деталі 3, ізоляційна камера 4, феромагнітні пластини 5, між якими розміщена камера, магнітопровід 6 з гнутого прутка низьковуглецевої сталі, або набраний з окремих елементів. На рис. 5.13 показано один із варіантів магнітопроводу, що складається з елементів, зроблених шляхом набору феромагнітних пластин з формами 7 і 8 (див. рис. 5.13), відігнутих у різні сторони від центральної частини П-образної форми пластин. Магнітний потік Ф, що проходить по магнітопроводі, пластинам 5 і усередині камери, приблизно дорівнює
![]() ,
,
де W- кількість витків магнітопроводу; I- струм у шині; Uст-падіння магнітного потенціалу в магнітопроводі; Rм1- магнітний опір зазорів між ділянками; Rм2- магнітний опір зазорів між магнітопроводом і пластинами 5; Rn- магнітний опір зазору δ між пластинами в камері.
Для варіанта на рис. 5.13 число витків W=3. Таке розташування витків забезпечує створення сили F, що діє на електричну дугу і спрямованої усередину камери. Економія міді й електроенергії при цьому складає не менш 60-80%. Недоліки конструкції є: підвищена складність, необхідність збільшення перетину магнітопроводу в порівнянні з багатовитковою шиною через великі втрати магніторушійної сили і струмів розсіювання.
Розглянута конструкція магнітної системи застосовна в контактних пристроях апаратів, особливо на підвищені номінальні струми, де для забезпечення контактного натискання і відповідно зменшення падіння напруги на контактах і їхнього нагрівання використовують пружини з значною жорсткістю.
Для розмикання контактів приводи апаратів повинні переборювати сили пружин, що змушує збільшувати потужність і габарити приводу і, відповідно, всього апарата. Тому що сила пружин не залежить від струму, що протікає в контактах, а в експлуатації апарати не постійно працюють при повному навантаженні по струму, то має місце надлишкова потужність приводу. Часткове усунення цього недоліку можливо шляхом застосування простого магнітного замка (рис.5.14), де на контактодержачах 1 і 2. що притягуються один до одного, установлюють магнітні системи 5, 6, збільшуючи контактне натискання і дозволяючи тим самим зменшити силу пружини.
Перевагою тут є збільшення натискання при зростанні струму. Щоб не збільшувати силу приводу відключення для подолання сили, що розвивається магнітним замком, його магнітна система повинна бути обрана, виходячи з умови насичення при струмах уставки. Цим також досягається зменшення росту сили замка при зносі контактів, коли зазор між торцями магнітної системи знижується.
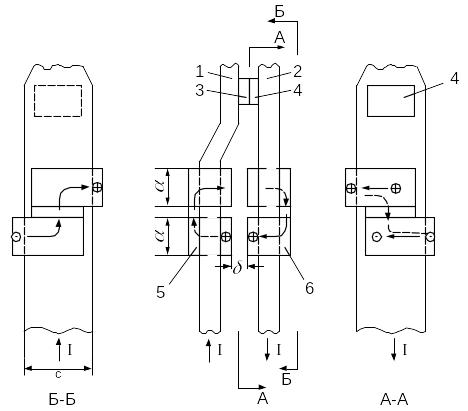
Рис. 5.14. Конструктивні рішення збільшення сили
притискання контактів
З метою зменшення втрат енергетичних ресурсів проведено дослідження дугогасіння в камері із зменшеною розсіюваною енергією та обгрунтовано метод зменшення енергії в процесі розмикання контактів комутаційних апаратів [205, 276, 277].
При відключенні вимикачем струмів перевантаження або короткого замикання в його дугогасній камері виділяється енергія Wд з двох складових:
Wм – енергії магнітного поля індуктивності електричного кола та Wп – енергії джерела живлення, зменшеної на величину WR, що витрачається на активному опорі кола. Для попередньої приблизної оцінки їх питомої величини розглянемо процес розмикання вимикачем кола з індуктивностями при наступних допущеннях: напруга на дузі постійна Uд= const, що майже видержується в камерах з деіонними пластинами; активний опір кола дорівнює нулю; час наростання напруги tи= 0.
Цей процес представлено на рис. 5.15. Час t1 складається з часу tуст – часу наростання струму до величини його уставки та tпр – власного часу відключення приводом.
На
відрізку 0 < t < t1 ![]()
де UП – напруга живлення; L – індуктивність кола.
Максимальний
струм ![]()
На
відрізку t1
< t < t2
, де t2
- час відключення
![]()

Рис. 5.15. Зміна напруги дуги при розмиканні контактів
Звідки
час горіння дуги 
Енергія Wд дорівнює

Енергія
магнітного поля ![]()
Енергія Wп= Wд - Wм, тоді:

Відношення Wп до Wм
де ν - кратність перенапруги.
Якщо, наприклад, ν =2, то k =1, це значить, що з джерела живлення поступає в камеру таж кількість енергії, яка була накопичена і в індуктивності. У зв’язку з цим для полегшення процесу дугогасіння, зменшення інтенсивності зносу матеріалів і розмірів камери необхідно виконати дослідження та розробити рішення для обмеження енергії Wп.
В [205] автором розглянуто конструкцію та наведено результати дослідження камери, що дає можливість зменшити величину Wп. Схему увімкнення камери представлено на рис. 5.16.

Рис. 5.16. Схема дугогасіння.
При розмиканні контактів і переході дуги в камеру з решітками струм i2 індуктивного навантаження (L2, R2) замикається через діод Д, пластину П1, дугу Uд2 і пластину П2. Струм i1 зменшується з більшою швидкістю, чим i2 так як L1 < L2, що приводить до обмеження величини енергії з джерела живлення до камери.
Виконані дослідження [205] показують, що при L1=0 (l1=0) в дугогасній камері не витрачається енергія з джерела живлення. Таким чином зменшуються втрати електроенергії при L1 # 0 ефективність схеми значно зменшується, тобто при відключенні струмів короткого замикання, що виникло поблизу вимикача, енергія від мережі Wп значно перевершує Wм. Таким чином, схему можна рекомендувати для віддалених коротких замикань, або в колах, де розмикаються струми близькі до номінальних.
Зменшення матеріаломісткості електричних машин. Пропонується впроваджувати проекти ресурсозбереження для зменшення ресурсомісткості електричних машин за рахунок оптимізації їх геометричних параметрів та підвищення надійності ізоляції [197, 202. 203].
Для приводу поршневих компресорів доцільно використовувати асинхронні короткозамкнені двигуни оберненого (маховичного) типу, у яких ротор обертається навколо нерухомого статора [280]. Радіальні розміри цих двигунів можуть перевищувати осьові, що дозволяє одержати значний момент інерції обертання і не використовувати спеціальні маховики. В цих двигунах на величину активного опору фази короткозамкненої обмотки істотний вплив мають короткозамикаючі кільця, геометричні параметри яких визначають, в значній мірі, оптимальність всієї конструкції. Для вибору раціональних розмірів короткозамикаючих кілець і точного розрахунку їх опорів необхідно розрахувати розподіл питомого струму в кільцях.
ЛЕКЦІЯ 12.