

Структурна схема кр580вт57 Самостійна робота № 23
Тема : Програмований послідовний інтерфейс КР580ВВ51
Програмуємий послідовний інтерфейс КР580ВВ51 (i8251) є універсальним синхронно-асинхронним прийомо-передавачем (УСАПП), призначений для організації обміну між МП і зовнішніми пристроями в послідовному форматі. Універсальний синхронно-асинхронний прийомо-передавач приймає дані з 8-розрядної шини даних МП і передає їх в послідовному форматі периферійному пристрою або отримує послідовні дані від периферійного пристрою і перетворює їх в паралельну форму для передачі МП. Обмін може бути як напівдуплексним (однонаправленим), так і дуплексним (двонаправленим). Послідовний інтерфейс може здійснювати обмін даними в асинхронному режимі із швидкістю передачі до 9,6 Кбіт/с або в синхронному — з швидкістю до 56 Кбіт/с залежно від запрограмованого режиму. Довжина переданих даних — від 5 до 8 битий. При передачі в МП символів завдовжки менше 8 біт невикористані біти заповнюються нулями. Формат символу містить також службові біти і необов'язковий біт контролю парності.
Структурна схема УСАПП (рис. 1) містить:
- буфер передавача TBF з схемою управління передавачем TCU, призначений для прийому даних від МП і видачі їх в послідовному форматі на вихід TхD;
- буфер приймача RBF з схемою управління приймачем RCU, що виконує прийом послідовних даних з входу RхD і передачу їх в МП в паралельному форматі;
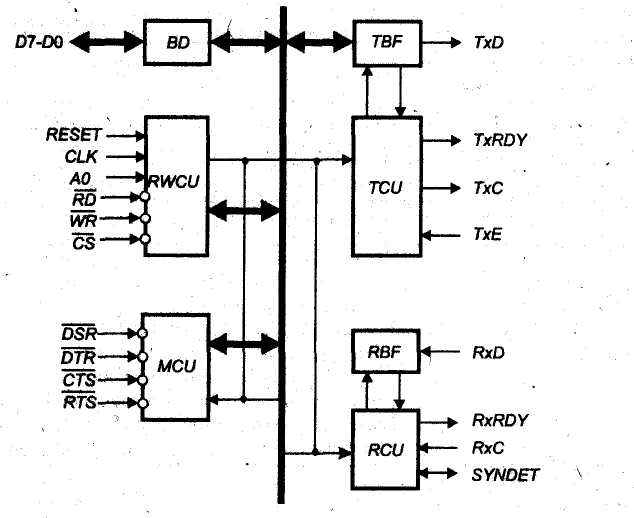 -
буфер даних BD, що є паралельним 8-розрядним
двонаправленим
буфером шини даних з трьохстабільними
каскадами, який
використовується для обміну даними і
управляючими словами між
МП і УСАПП;
-
буфер даних BD, що є паралельним 8-розрядним
двонаправленим
буфером шини даних з трьохстабільними
каскадами, який
використовується для обміну даними і
управляючими словами між
МП і УСАПП;
- блок управління читанням/записом RWCU, який приймає сигнали, що управляють, від МП і генерує внутрішні сигнали управління;
- блок управління модемом MCU, що оброблює управляючі сигнали, призначені для зовнішнього пристрою.
Рис. 1. Структурна схема УСАПП
Призначення виводів ВІС УСАПП приведено в табл. 1.
Таблиця 1. Призначення виводів ВІС УСАПП
Позначення виводу |
Номер виводу |
Призначення |
D7—D0 |
8; 7; 6; 5; 2; 1; 28; 27 |
Канал даних |
RESET |
21 |
Скидання контролера (початковий стан) |
CLK |
20 |
Синхронізація |
А0 |
12 |
L-рівень сигналу визначає можливість запису або читання даних в (з) УСАПП; Н-рівень визначає можливість запису управляючих слів, або читання слова стану в (з) УСАПП |
|
13 |
Читання — дозвіл виведення даних або слова стану з УСАПП на шину даних |
|
10 |
Запис — дозвіл введення інформації з шини даних |
|
11 |
Вибірка кристала — з'єднання УСАПП з шиною даних МП |
|
22 |
Готовність передавача терміналу |
|
24 |
Запит передавача терміналу |
|
17 |
Готовність приймача терміналу |
|
23 |
Запит приймача терміналу |
SYNDЕT |
16 |
Вид синхронізації: для синхронного режиму вихідний сигнал високого рівня — ознака внутрішньої синхронізації; для синхронного режиму із зовнішньою синхронізацією сигнал є вхідним; у асинхронному режимі сигнал — вихідним |
RXC |
25 |
Синхронізація приймача |
RXRDY |
14 |
Готовність приймача |
RXD |
3 |
Вхід приймача |
ТХС |
9 |
Синхронізація передавача |
|
18 |
Кінець передачі. Сигнал Н-рівня є ознакою закінчення посилки даних |
TXRDY |
15 |
Готовність передавача |
TXD |
19 |
Вихід передавача |
UCC |
26 |
Напруга живлення 5 В |
GND |
4 |
Загальний вивід 0 В |
З'єднання УСАПП з шинами МП показане на рис. 2.
Сигнал Ai, що подається на вивід А0 ВІС, визначає дві адреси УСАПП. При адресі з Ai = 0 передаватимуться дані, при Ai = 1 — записуватися команди або читатися слово стану. Інші висновки під'єднуються до однойменних ліній шин МП системи.
Значення сигналів адреси А0, управління читанням , записом і вибіркою при записі і читанні регістрів ВІС приведено в табл. 2.
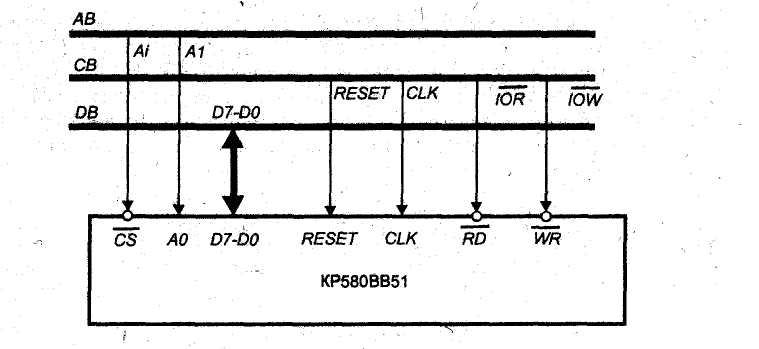
Рис. 2. З'єднання УСАПП з шинами МП
Таблиця 2. Визначення операцій сигналами управління від МП
Операції |
Сигнали управління |
|||
А0 |
|
|
|
|
Читання даних з УСАПП на шину D7—D0 |
0 |
0 |
1 |
0 |
Запис даних з шини D7—D0 в УСАПП |
0 |
1 |
0 |
0 |
Зчитування слів стану з УСАПП на шину D7—D0 |
1 |
0 |
1 |
0 |
Запис управляючого слова з шини D7—D0 в УСАПП |
1 |
1 |
0 |
0 |
Високоімпедансний стан виводів D7—D0 |
X |
1 |
1 |
0 |
|
X |
X |
X |
1 |
Програмування УСАПП відбувається шляхом завантаження в нього управляючих слів. Розрізняють управляючі слова двох типів: управляюче слово ініціалізації і управляюче операційне слово. Управляюче слово ініціалізації задає синхронний або асинхронний режим роботи, формат даних, швидкість прийому або передачі, контроль правильності даних. Це слово заноситься відразу після установки УСАПП програмно або по сигналу RESET, а замінюється лише при зміні режиму. Формат управляючого слова різний в асинхронному або синхронному режимах.
Управління роботою УСАПП після ініціалізації здійснюється записом управляючих операційних слів, які можуть багато разів задаватися в процесі обміну, управляючи різними його етапами.
Під час асинхронного обміну операційне управляюче слово завантажується відразу після управляючого слова ініціалізації, а під час синхронного – перед ним розташовуються один або два символи синхронізації.
Після запису управляючого слова режиму і операційного слова УСАПП готовий до виконання обміну даними в одному з п'яти режимів:
- синхронна передача;
- синхронний прийом з внутрішньою синхронізацією;
- синхронний прийом із зовнішньою синхронізацією;
- синхронна передача;
- асинхронний прийом.