

3.Дополнение к курсовой работе
Производим расчёт, для построения зависимостей ω(t) и M(t):
Соотношение масс:
![]() (3.1)
(3.1)
![]()
Резонансная частота
системы:
![]()
![]() (3.2)
(3.2)
![]()
Коэффициент сил вязкого трения, приведенный к двигателю:
![]() (3.2)
(3.2)
![]()
Логарифмический
декремент:
![]() (3.3)
(3.3)
 (3.4)
(3.4)
![]()
Резонансная частота
:
![]()
![]()
m![]() (3.4.1)
(3.4.1)
Определить оптимальную по критерию минимума колебательности жесткость механической характеристики привода.
Синтезировать
Определить обобщенные параметры
Жесткость естественной механической характеристики в системе ТП-Д:
 (3.5)
(3.5)
![]()
![]() (3.6)
(3.6)
![]()
![]() (3.7)
(3.7)
![]()
Используя заданное
соотношение масс
![]() и рассчитанное
и рассчитанное
![]() ,
по кривым обобщенной зависимости
максимального демпфирования
,
по кривым обобщенной зависимости
максимального демпфирования
![]() и
и
![]() определить значения
определить значения
![]() и
и
![]()
-
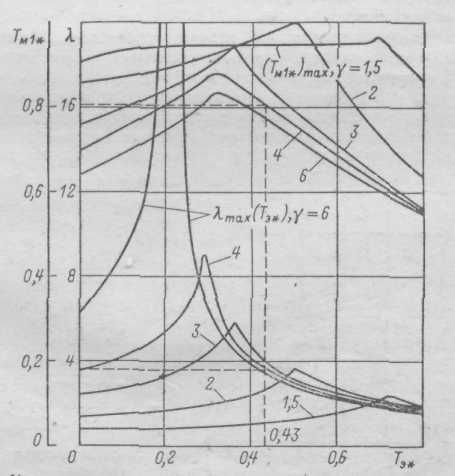
Рис.1
Характеристики максимального демпфирования
![]() ,
,
![]()
Определить модуль оптимальной жесткости механической характеристики
![]() (3.8)
(3.8)
![]()
Сформулировать выводы о необходимых мерах по изменению для получения максимального демпфирования.
Для реализации
предельного демпфирования по кривым
обобщенной зависимости предельного
демпфирования
и
определить значения![]() и
и
![]() .
.
-
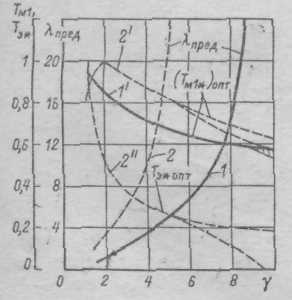
Рис.2
Характеристики предельного демпфирования
![]() ,
,
![]() ,
,![]()
Оптимальная постоянная времени якорной цепи:
![]() (3.9)
(3.9)
![]()
Требуемая для предельного демпфирования жесткость механической характеристики составит:
![]() (3.10)
(3.10)
![]()
Определить пусковой ток двигателя и максимальное отклонение скорости двигателя от заданной в переходном процессе.
Скорость идеального холостого хода в конце пуска:
![]() . (3.11)
. (3.11)
Время нарастания управляющего воздействия:
![]() (3.12)
(3.12)
Требуемая скорость нарастания управляющего воздействия:
![]() (3.13)
(3.13)
Требуемая зависимость
![]() при пуске
при пуске
![]()
Статическое падение скорости:
![]() (3.14)
(3.14)
Время запаздывания:
![]() (3.15)
(3.15)
Максимальный момент при пуске:
![]() (3.16)
(3.16)
Максимальное отклонение скорости от заданной:
![]() (3.17)
(3.17)
Пусковой ток двигателя:
![]() (3.18)
(3.18)
Расчёт и построение зависимостей ω(t) и M(t):



![]()
![]()


Список рекомендуемой литературы
Чиликин М.Г., Ключев В.И., Сандлер А.С. Теория автоматизированного электропривода . – М.: Энергия , 1979.
Шипило В.И. Автоматизированный вентильный электропривод. – М.: Энергия , 1969.
Башарин А.В., Новиков В.А., Соколовский Г.Г . Управление электроприводами. – Л.: Энергоиздат, 1982.
Гарнов В.К., Рабинович В.Б., Вишневецкий В.М. Унифицированные системы автоуправления электроприводами в металлургии.- М.: Металлургия, 1977.