

 Федеральное
агентство по образованию и науке
Федеральное
агентство по образованию и науке
Российской Федерации
Государственное образовательное учреждение
высшего профессионального образования
Ковровская государственная технологическая академия
им. В.А. Дегтярева
Кафедра «Приборостроение»
КУРСОВАЯ РАБОТА
по дисциплине:
«Моделирование систем управления»
на тему:
«Моделирование системы управления
скоростью вращения исполнительного двигателя»
Задание 2 вариант 8
Научный руководитель: Баунин В.Г.
Исполнитель Клеветов Д.В.
Студент гр.: У - 103
2007

Содержание
Задание . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1. Разработка математической модели системы управления. . . . . . . . . . 5
1.1 Математическая модель ЭВМ . . . . . . . . . . . . . . . . . . . . . 5
1.2 Математическая модель ЦАП . . . . . . . . . . . . . . . . . . . . . 6
1.3 Математическая модель усилителя мощности . . . . . . . . . . . . 6
1.4 Математическая модель исполнительного двигателя . . . . . . . . 6
1.5 Математическая модель приборного редуктора . . . . . . . . . . . 8
1.6 Математическая модель тахогенератора . . . . . . . . . . . . . . . 8
1.7 Математическая модель согласующего усилителя . . . . . . . . . . 8
1.8 Математическая модель АЦП . . . . . . . . . . . . . . . . . . . . . 8
1.9 Математическая модель редуктора и объекта управления . . . . . . 9
1.10 Математическая модель системы управления скоростью вращения
исполнительного двигателя.. . . . . . . . . . . . . . . . . . . . . . 10
2. Разработка машинной модели системы управления . . . . . . . . . . . . . 12
3. Результаты математического моделирования. . . . . . . . . . . . . . . . . 14
Заключение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
25.04.07
У
Задание
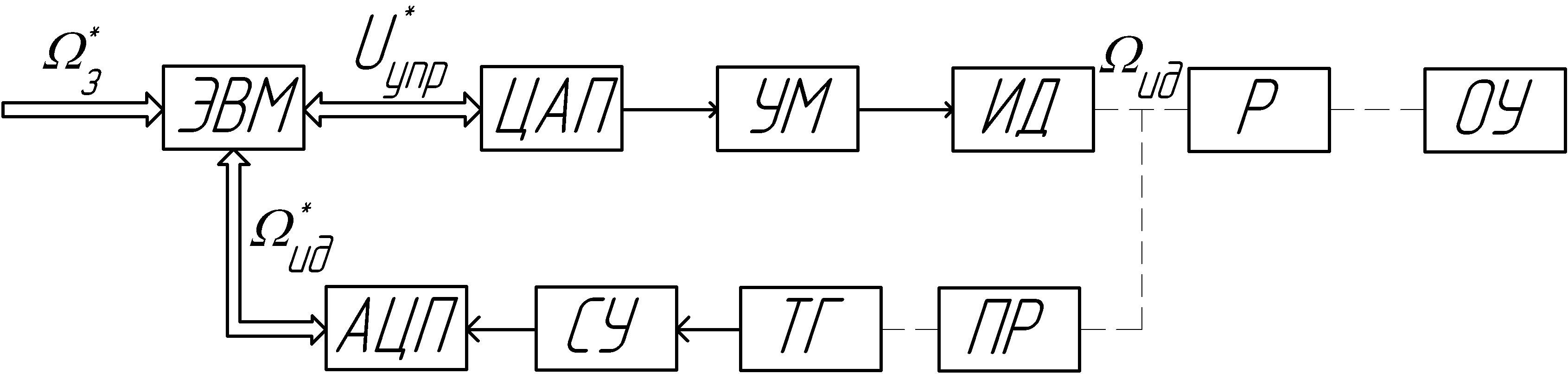
Рис. 1. Функциональная схема
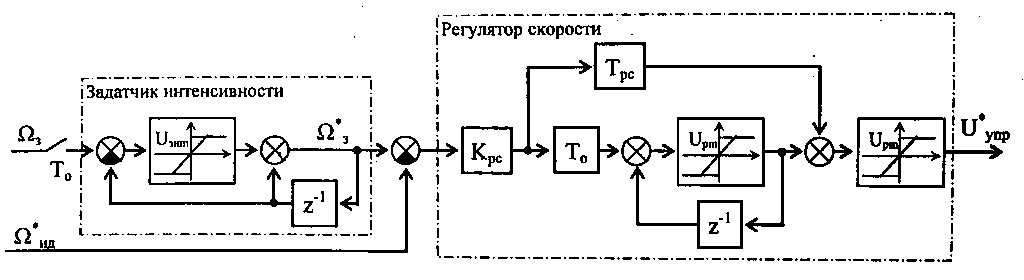
Рис. 2. Алгоритм работы ЭВМ
Параметры системы:
![]() – число
разрядов ЦАП;
– число
разрядов ЦАП;
![]() – максимальное
выходное напряжение ЦАП;
– максимальное
выходное напряжение ЦАП;
![]() – максимальное
входное напряжение АЦП;
– максимальное
входное напряжение АЦП;
![]() – крутизна
тахогенератора.
– крутизна
тахогенератора.
Характеристики задающего воздействия:
![]() – входной сигнал (скорость);
– входной сигнал (скорость);
![]() – скорость изменения входного сигнала
(ускорение).
– скорость изменения входного сигнала
(ускорение).
Параметры усилителя мощности (УМ):
![]() – коэффициент усиления;
– коэффициент усиления;
![]() – максимальное выходное напряжение.
– максимальное выходное напряжение.
Параметры исполнительного двигателя (ИД):
– в качестве исполнительного двигателя используется электродвигатель постоянного тока с независимым возбуждением;
![]() – номинальное напряжение якоря;
– номинальное напряжение якоря;
![]() – номинальный ток якоря;
– номинальный ток якоря;
![]() – номинальная скорость вращения;
– номинальная скорость вращения;
![]() – номинальный момент на валу;
– номинальный момент на валу;
![]() – момент инерции ротора.
– момент инерции ротора.
Параметры редуктора (Р):
![]() – передаточное отношение;
– передаточное отношение;
![]() – коэффициент,
учитывающий момент инерции вращающихся
частей редуктора;
– коэффициент,
учитывающий момент инерции вращающихся
частей редуктора;
![]() – КПД прямого хода;
– КПД прямого хода;
![]() – КПД обратного хода;
– КПД обратного хода;
![]() – люфт;
– люфт;
![]() – жесткость.
– жесткость.

Параметры приборного редуктора (ПР):
– приборный редуктор считать абсолютно жестким и безлюфтовым;
![]() – передаточное отношение.
– передаточное отношение.
Параметры объекта управления (ОУ):
![]() – момент инерции нагрузки;
– момент инерции нагрузки;
![]() – момент сухого трения;
– момент сухого трения;
![]() – момент неуравновешенности нагрузки.
– момент неуравновешенности нагрузки.
Определить:
1.
Значение
![]() ,
,
![]() ,
периода квантования ЭВМ, число разрядов
АЦП (10, 12, 14), при которых обеспечиваются
следующие характеристики:
,
периода квантования ЭВМ, число разрядов
АЦП (10, 12, 14), при которых обеспечиваются
следующие характеристики:
– перерегулирование
при отработке входного воздействия
![]() не более 15%;
не более 15%;
– установившаяся
ошибка на участке разгона ИД при входном
воздействии
 не более
не более
![]() .
.
2. Исследовать влияние периода квантования ЭВМ на показатели качества переходного процесса.
1. Разработка математической модели системы управления скоростью вращения исполнительного двигателя
1.1. Математическая модель эвм.
Рис. 1.1. Структурная схема ЭВМ.
1.1.1. Уровень ограничения скорости изменения выходного сигнала задатчика интенсивности:
![]() ,
,
где – заданное ускорение;
![]() – период
квантования по времени, подбирается
экспериментально.
– период
квантования по времени, подбирается
экспериментально.
1.1.2. Задаём диапазон изменения управляемой величины (скорость вращения ИД):
![]() ,
,
где
![]() – номинальная скорость вращения
двигателя.
– номинальная скорость вращения
двигателя.
1.1.3. Выбираем количество разрядов ЭВМ:
![]() .
.
1.1.4. Определяем величину младшего разряда ЭВМ:
![]() ,
,
где
![]() – максимальная скорость вращения
двигателя.
– максимальная скорость вращения
двигателя.
1.1.5. Определяем уровень ограничения сигнала управления:
![]() ,
,
где – максимальное выходное напряжение ЦАП;
![]() – крутизна
ЦАП.
– крутизна
ЦАП.
Значения
![]() и
и
![]() определяются в ходе исследования системы
регулирования.
определяются в ходе исследования системы
регулирования.
1.2. Математическая модель цап.
![]()
![]()
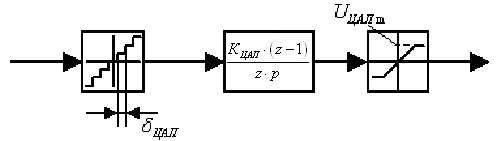
Рис. 1.2. Структурная схема ЦАП
Определим крутизну ЦАП:
![]() ,
,
где – максимальное выходное напряжение ЦАП;
– максимальная скорость вращения двигателя.
Определим величину младшего разряда ЦАП:
![]() ,
,
где
![]() – величина младшего разряда ЭВМ;
– величина младшего разряда ЭВМ;
– количество разрядов ЭВМ;
– количество разрядов ЦАП.
1.3. Математическая модель усилителя мощности.
![]()
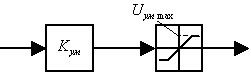
Рис. 1.3. Структурная схема усилителя мощности
![]() – коэффициент усиления;
– коэффициент усиления;
– максимальное выходное напряжение усилителя мощности.