

2) Метод параметрической оптимизации линейного закона управления
Метод параметрической оптимизации линейного закона управления заключается в поиске таких значений параметров линейного закона управления, которые обеспечивают перевод объекта управления в заданное состояние за минимальное время и последующее удержание объекта в этом состоянии.
Одним из достоинств этого метода является возможность включения в закон управления только тех переменных состояния, которые соответствуют достаточно точно измеряемым физическим величинам. В случае водоизмещающего судна наиболее точно из принятых в рассмотрение физических величин измеряются угол рыскания и угловая скорость рыскания.
Поскольку в рассматриваемом случае изменение состояния судна вблизи целевой точки носит экспоненциальный характер, то теоретически время перехода в целевое состояние не ограничено. В связи с этим предлагается принимать за момент окончания процесса управления момент входа изображающей точки в область, точки которой откланяются от целевого состояния не более чем на 10% от начальной величины рассогласования.
Алгоритм программы поиска параметров линейного закона управления
![]()
Выбор параметров закона управления
Нахождение времени переходного процесса
Время минимально?
нет
Вывод графиков
Конец
да
Текст программы поиска параметров линейного закона управления
Текст основной программы:
V0=5.65; % скорость хода судна
L=51; % длина по ватерлинии
% коэффициенты математической модели судна
r21=-0.59;
r31=5.32;
q21=0.94;
q31=-2.41;
s21=-0.29;
s31=-3.4;
fi=V0/L; % нормирующая частота
a11=-r31*fi;
a12=-q31*fi^2;
a21=-r21;
a22=-q21*fi;
b11=-s31*fi^2;
b21=-s21*fi;
dt=0.007; % шаг для метода Эйлера
y1i=0;
y2i=0; %данные для метода Эйлера
y3i=10*3.14/180;
T2=0;
Y2=[y1i,y2i,y3i];
k0=[-1;-2]; % начальные точки для коэффициентов обратных связей
k=fminsearch('myfun3',k0);
k
ug=-k(1)*y1i-k(2)*y3i; % управления при вводе коэффициентов обратных связей
if(abs(ug)>35*3.14/180)
ug=sign(ug)*35*3.14/180; % управление
end
for t=dt:dt:40
u=-k(1)*y1i-k(2)*y3i;
if(abs(u)>35*3.14/180)
u=sign(u)*35*3.14/180;
end
y1j=y1i+dt*(a11*y1i+a12*y2i+b11*u);
y2j=y2i+dt*(a21*y1i+a22*y2i+b21*u);
y3j=y3i+dt*(y1i);
T2=[T2;t];
Y2=[Y2;y1j y2j y3j];
ug=[ug;u];
y1i=y1j;
y2i=y2j;
y3i=y3j;
end
m=0;
tk=1000;
i=length(T2);
while(m<0.01)
m=max([abs(Y2(i,1)),abs(Y2(i,2)),abs(Y2(i,3))]);
i=i-1;
end
tk=T2(i+1);
figure(1)
plot(T2,Y2(:,1),T2,Y2(:,2),T2,Y2(:,3),T2,ug,'m')
legend('x1','x2','x3','u');
xlabel('t,c');
grid on;
Текст функции myfun3:
function a=myfun3(k) %подбираем вектор k при котором а будет минимальным
V0=5.65; % скорость хода судна
L=51; % длина по ватерлинии
% коэффициенты математической модели судна
r21=-0.59;
r31=5.32;
q21=0.94;
q31=-2.41;
s21=-0.29;
s31=-3.4;
fi=V0/L; % нормирующая частота
a11=-r31*fi;
a12=-q31*fi^2;
a21=-r21;
a22=-q21*fi;
b11=-s31*fi^2;
b21=-s21*fi;
dt=0.007; % шаг для метода Эйлера
y1i=0;
y2i=0;
y3i=10*3.14/180;
T2=0;
Y2=[y1i,y2i,y3i];
ug=-k(1)*y1i-k(2)*y3i;
if(abs(ug)>35*3.14/180)
ug=sign(ug)*35*3.14/180;
end
for t=dt:dt:25
u=-k(1)*y1i-k(2)*y3i;
if(abs(u)>35*3.14/180)
u=sign(u)*35*3.14/180;
end
y1j=y1i+dt*(a11*y1i+a12*y2i+b11*u);
y2j=y2i+dt*(a21*y1i+a22*y2i+b21*u);
y3j=y3i+dt*(y1i);
T2=[T2;t];
Y2=[Y2;y1j y2j y3j];
ug=[ug;u];
y1i=y1j;
y2i=y2j;
y3i=y3j;
end
m=0; % отклонение от установившегося значения
tk=1000; ; % время по истечении которого входит в коридор (можно взять 0)
% находим конец ПП
i=length(T2);
while(m<0.01)
m=max([abs(Y2(i,1)),abs(Y2(i,2)),abs(Y2(i,3))]);
i=i-1;
end
tk=T2(i+1);
a=((Y2(length(T2),1))^2+(Y2(length(T2),2))^2+(Y2(length(T2),3))^2+tk);
% минимизация а для нахождения коэффициентов обратных связей
Результаты работы программы:
Найденные значения параметров линейного закона управления:
k1 =-5,5525, k2 = 4,32.
Время переходного процесса составило15,25 с, что несколько больше чем при использовании метода, основанного на теореме об N интервалах.
Графики переходных процессов:
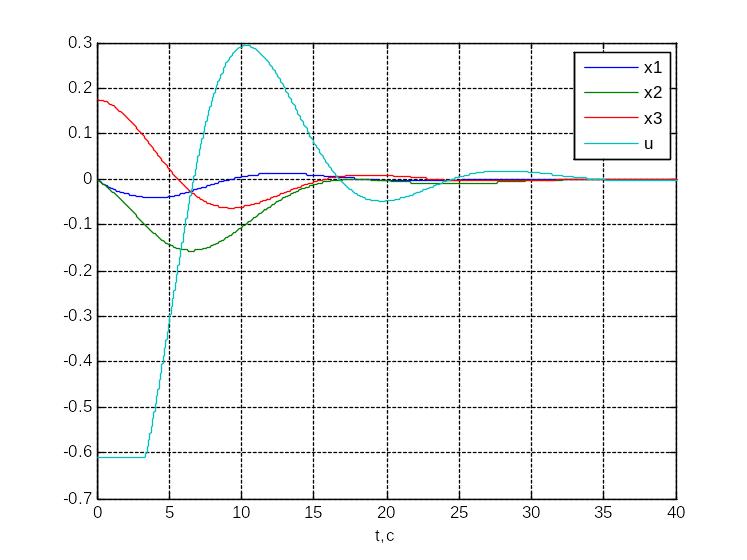
Рис. 3. Переходные процессы в системе.
x1 – (угловая скорость рыскания);
x2 – (угол дрейфа);
x3 – φ (угол рыскания);
u – (угол перекладки руля).