

Лабораторная paбота № 2
НЕЛИНЕЙНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ.
СИСТЕМЫ С ПЕРЕМЕННОЙ СТРУКТУРОЙ
1. Введение
Релейные системы получили широкое распространение в практике автоматического регулирования. Достоинством релейных систем является простота конструкции, надежность, простота обслуживания и настройки. Релейные системы представляют собой особый класс нелинейных АСР.
В отличие от непрерывных в релейных системах регулирующее воздействие изменяется скачкообразно всякий раз, когда управляющий сигнал реле (чаще всего это ошибка регулирования) проходит через некоторые фиксированные (пороговые) значения, например, через нуль.
Релейные системы, как правило, обладают высоким быстродействием вследствие того, что управляющее воздействие в них изменяется практически мгновенно, а на исполнительное устройство действует кусочно-постоянный сигнал максимальной амплитуды. В то же время в релейных системах часто возникают автоколебания, что во многих случаях является недостатком. В настоящей работе исследуется релейная система с четырьмя различными законами управления.
2. Цель проведения лабораторной работы
- овладение методами математического описания и анализа нелинейных систем управления техническими объектами;
- приобретение навыков имитационного моделирования нелинейных систем с помощью Simulink.
3. Задачи исследования
- приобретение навыков применения Simulink для моделирования поведения нелинейных систем;
- овладение методами математического описания нелинейных систем на примерах моделей летательного аппарата и космического телескопа;
- освоение аналитических и графических методов анализа устойчивости и качества нелинейных систем;
- выявление особенностей поведения нелинейных систем;
- оценка преимуществ и особенностей применения нелинейных законов управления по сравнению с линейными.
3. Краткие теоретические сведения
3.1. Основные понятия нелинейных систем
Один из методов математического представления нелинейных систем, наиболее удобный для их анализа - это описание в пространстве состояний, включающий уравнения поведения
![]() (1)
(1)
уравнение наблюдения
![]() (2)
(2)
и начальные условия
![]() ,
,
![]() ,
…,
,
…,
![]() (3)
(3)
где x1, x2, …, xn - переменные вектора состояния,
у - выходная переменная (измеряемая), и - входная переменная,
f1, …, fn, - нелинейные функции.
Решение уравнений (1),(2) аналитическими методами не всегда оказывается простым. Поэтому поведение нелинейной системы эффективнее исследовать путем численного моделирования в среде Simulink (Matlab). Библиотека нелинейных звеньев содержит типовые статические характеристики: нелинейность типа люфт, диод, нелинейность с насыщением, квантователь по уровню и другие.
Наиболее широкое распространение в бытовой технике и в системах управления технологическим оборудованием получил релейный элемент.
Модель реле в Simulink представлена блоком Reley (рис.1) в Discontinuities
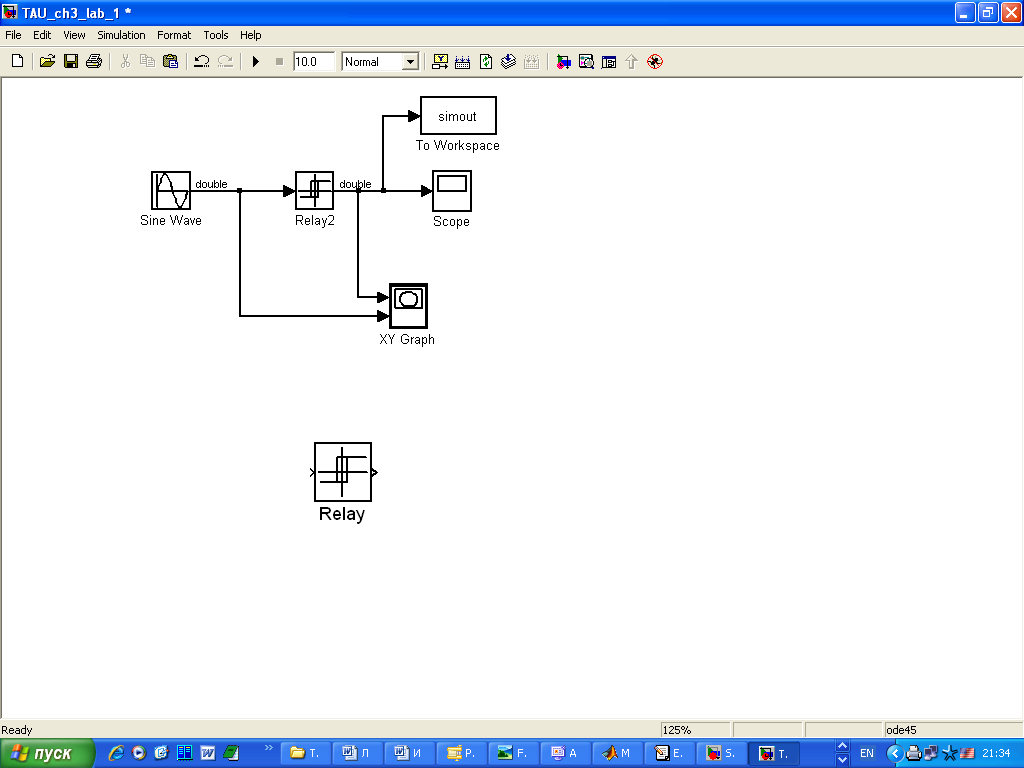
Рис. 1. Реле
Статическая характеристика реле приведена на рис. 2, и описывается четырьмя параметрами, которые выбираются в меню настроек блока:
- точка 1 - точка включения реле; ее значение заносится в графу switch on point,
- точка 2 - точка выключения реле; ее значение заносится в графу switch off point,
- точка 3 - значение уровня сигнала на выходе включенного релейного элемента - заносится в графу output when on,
- точка 4 - значение уровня сигнала на выходе выключенного релейного элемента - заносится в графу output when off.
Рис. 2. Статическая характеристика реле