

12. Особенности динамики полноприводного автомобиля
ОСОБЕННОСТИ ДИНАМИКИ ПОЛНОПРИВОДНОЙ МАШИНЫ: Типы приводов: Жесткий (блокированный). Дифференциальный. С помощью м-ма своб хода. С помощью муфты вязкостного трения ( вискомуфты). Жесткий привод кинематическое несоответствие. Vтп¹Vтз ωпRп¹ωзRз Rп¹Rз, Допуски на изготовление шин. 1)Износ шин.2)Давление воздуха в шинах.3)Нормальная нагрузка на шины. Vдп=Vдз Vтп(1–Кбп)=Vтз(1–Кбз), Кбп¹Кбз, Деформируемая поверхность(трактор): Кб=f(Pкр), Кб≤Кбдоп, Кбп=Кбз=Кбдоп и т.д., Тв-я дорога (автомобиль) mз=(0,70…0,85)ma Пусть Vтп<Vтз, Кбз=0, Vтп(1–Кбп)=Vтз, Кбп<0, =const, от задн кол Ne+Nц->Nц->пер кол, Nе->РК
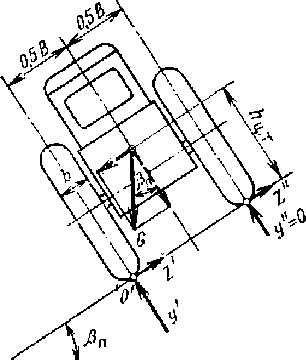
Рис. 8.2. Схема внешних сил и реакций, действующих на колесный трактор, стоящий на предельном поперечном уклоне
Отрицательные последствия циркуляции мощности: Повыш износ шин. Повыш износ трансмиссии. Повыш расход топл. Снижение динам качеств авто. Дифференциальный привод: ωпRп¹ωзRз, Если Rп¹Rз, то ωп¹ωз. Симметричный дифференциал Ркп=Ркз, Хорошая дорога Ркп<Ксцgmп Ркз<Ксцgmз Пусть Ксцп«Ксцз, тогда: Ркп=Рсцп=Ксцпgmп Ркз=Ркп=Ксцпgmп«Ксцзgmз Привод с механ свободного хода: Заложено кинематич. несоответствие Vтз>Vтп Кбз<(0,04…0,06), передний мост отключен Кб=f(Pкр)→Кбз>(0,04…0,06) Vдз→уменьшилась→ Передний мост автоматически включился.
13. Поперечная устойчивость тракторов и автомобилей
Предельным статическим углом поперечного уклона вп называется наибольший угол, на котором автомобиль может стоять, не опрокидываясь и не сползая вниз, в поперечной плоскости.
Нарушение поперечной устойчивости может наступить вследствие действия боковых сил: центробежных, поперечных составляющих сил, крюковой нагрузки, ударов о неровности почвы, сильного бокового ветра.
На рис. 8.2 изображена схема внешних сил и реакций, действующих на колесный трактор, стоящий на предельном поперечном уклоне.
Угол рп можно определить из условия, что опрокидывание начнется, когда нормальная реакция почвы У" на колеса, расположенные в верхней части уклона, снизится до нуля. Уравнение моментов относительно возможной оси О' опрокидывания имеет вид
![]()
При достаточной твердости почвы опрокидывание гусеничных тракторов происходит вокруг оси, образуемой наружными боковыми кромками звеньев гусеницы. В этом случае:
![]()
Колесные тракторы имеют, как правило, регулируемую ширину колеи. В зависимости от ширины колеи изменяются значения предельных статических углов поперечного уклона. При расстановке колес на основной размер колеи для тракторов с колесной формулой 4К2 и 4К4 значения этих углов находятся в пределах 40... 50°. Приблизительно в этих же пределах находятся соответствующие углы для гусеничных тракторов. Для тракторов с колесной формулой ЗК2 рп = 30...35°. В легковых автомобилях вертикальная координата центра тяжести Ьцх < 0,5В, поэтому для них рп >45°. В грузовых автомобилях при полной нагрузке, равномерно распределенной по платформе, Ьцх < 0,75В, чему соответствует рп «35°. При перевозках легковесных сельскохозяйственных грузов, таких как сено, солома и т.п., которые укладывают значительно выше бортов платформы автомобиля, высота центра тяжести увеличивается, в результате чего боковая устойчивость автомобиля снижается.
Статический угол РФ поперечного уклона, на котором возможно сползание машины. Для этого используем схему сил, изображенную на рис. 8.2, заменив угол вп на вФ.
Составив уравнение проекций всех сил, действующих в поперечной плоскости, на ось, параллельную поверхности пути, получим
![]()
В процессе исследований работы гусеничных тракторов на склонах установлено, что гусеницы обычной конструкции надежно удерживают трактор от сползания при крутизне склонов приблизительно до 16°. Для работы на более крутых склонах необходимы гусеницы с почвозацепами особой формы, имеющими развитые боковые поверхности. Практически опрокидывание без бокового скольжения бывает очень редко.
Рассмотрим простейший случай поворота колесной машины на горизонтальном участке с установившейся скоростью и постоянным радиусом вращения вокруг центра поворота. Допустим, что центр поворота О (рис. 8.3 а) расположен в точке пересечения геометрических осей всех колес машины. При повороте возникает результирующая центробежная сила Рц, приложенная к центру тяжести машины и направленная по радиусу от центра поворота. Ее определяют по формуле:

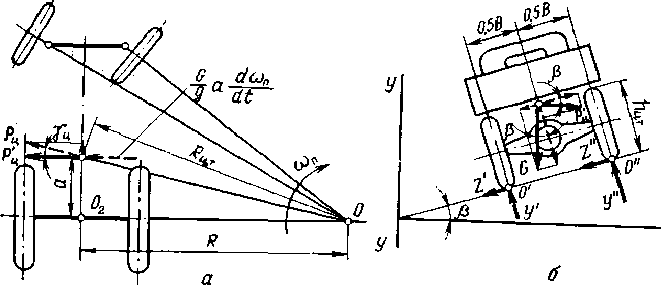
Рис. 8.3. Схема сил, действующих при криволинейном движении и повороте: а-на колесный трактор в горизонтальной плоскости; б-на автомобиль в поперечной плоскости
С увеличением скорости движения и уменьшением радиуса поворота центробежная сила резко возрастает и может превысить все прочие боковые силы, действующие на машину. Как следует из формулы, даже при сравнительно умеренной скорости движения автомобиля v = 15 м/с и не очень крутом радиусе поворота R = 40 м боковая составляющая Р'ц превышает 0,5G.
При входе машины в поворот помимо центробежной силы возникают также другие инерционные силы, так как переход от прямолинейного движения к установившемуся криволинейному с постоянным радиусом кривизны сопровождается непрерывным изменением положения центра поворота, уменьшением радиуса поворота и соответствующим увеличением угловой скорости поворота соп-
При движении автомобиля по дорогам на его поперечную устойчивость существенно влияет поперечный профиль полотна дороги на закруглениях. Если поперечный уклон дороги направлен в сторону, противоположную центру закругления, то боковая составляющая массы автомобиля и соответствующая составляющая центробежной силы, возникающей при повороте, действуют в одном направлении, стремясь опрокинуть автомобиль. Если поперечный уклон дороги направлен к центру закругления, то указанные две силы направлены в разные стороны. Очевидно, что во втором случае устойчивость автомобиля на повороте будет выше, чем в первом.