

16. Стабилизация управляемых колес поперечным наклоном шкворней
Стабилизацией управляемых колес автомобиля называется их способность сохранять положение, соответствующее прямолинейному движению, и возвращаться к нему после отклонения, вызванного поворотом руля или действием других сил.
Стабилизация управляемых колес происходит под действием моментов танценциальных X, боковых Y и вертикальных Z реакций на колесах относительно шкворней поворотных цапф.
Стабилизация управляемых колес улучшается при наличии продольного наклона шкворней (угол γ), бокового наклона шкворней (угол β) и боковой эластичности шин.
Параметрами, характеризующими стабилизацию управляемых колес, являются:
а) стабилизирующий момент Мс, стремящийся возвратить колеса в первоначальное положение;
б) угловая скорость ω самовозврата колес в нейтральное положение;
в) фактор стабилизации Фс — обратная величина минимально возможного угла поворота колес от нейтрального положения при их самовозврате.
Стабилизирующий момент при отклонении управляемых колес от нейтрального положения определяется по уравнению
![]() (37.4)
(37.4)
где Мzβ — момент от вертикальных реакций, вызванных боковым наклоном шкворней;
MYγ —момент от боковой реакции, вызванной продольным наклоном шкворней;
MYэ—момент от боковых реакций, вызванных боковой эластичностью шин;
Мхэ— момент от тангенциальной реакции, вызванной боковой эластичностью шин;
Mтр — момент трения в механизмах рулевого управления.
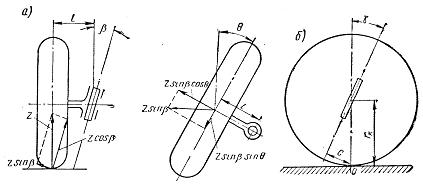
Рис. 37.2. Наклоны шкворней: а — боковой; 6 — продольный
При боковом наклоне шкворня {рис. 37.2), когда осуществляется поворот колеса относительно шкворня, колесо отклоняется от положения устойчивого равновесия и приподнимает переднюю часть автомобиля.
Масса, приходящаяся на колесо, стремится вернуть его в нейтральное положение. Стабилизирующий момент, возникающий при этом, может быть определен так:
![]() (37.5)
(37.5)
где Z— вертикальная реакция па колеса;
L — расстояние между осями колеса и шкворня;
β — угол бокового наклона шкворня;
Θ — угол отклонения колеса от нейтрального положения.
Реакция Z, (рис. 37.2, а) раскладывается на две составляющие: Zсоs β, параллельную оси шкворня, и Zsin β, перпендикуляную ей, последняя на плече L создает стабилизирующий момент МZβ.
При малых углах Θ поворота этот момент оказывает небольшое влияние на стабилизацию управляемых колес. Основное значение стабилизирующего момента М ´Zβ заключается в автоматическом самовозврате управляемых колес после их поворота.
Если
шкворень цапфы наклонен в продольном
направлении так, что продолжение его
оси с полотном дороги образует острый
угол (рис. 37.2, б), то между продолженной
осью шкворня и точкой О
приложения боковой реакции создается
плечо
![]()
и
в связи с деформацией пневматической
шины колеса rквозникает
боковая реакция, вызывающая другой
стабилизирующий момент
![]()
Равнодействующая, возникающая в месте контакта шины с дорогой, в результате боковой деформации шины смещается назад, поэтому стабилизирующий момент М´´´Yγ имеет место даже при вертикальном положении шкворня (γ = 0°).
Стабилизирующий момент М´´´Yγ, возникающий в результате боковой деформации шины, суммируется с моментом М´´´Yγ увеличивая стабилизацию управляемых колес.
В некоторых случаях момент М´´´Yγ возрастает настолько, что затрудняет управление автомобилем. Во избежание этого шкворням придают обратный продольный наклон. Возникающий при этом момент стремится отклонить управляемые колеса от нейтрального положения,уменьшая величину стабилизирующего момента М´´´Yγ.