

1. Буксование ведущего колеса Буксование-скольжение шины в пятне контакта в сторону,обратную направления дв-ия. (Vт-Vд)/Vт=Кб–это относ потеря скорости. Действ скорость Vд =S/t, (Vт–Vд)–потеря скор. Введем понятие кинематического радиуса rкин качения вед.колеса.В термехе кинем-им называют радиус такаго колеса,кот-ое катится со скор. υд без скольжения и буксования при угловой скорости ωк вращения, равной угловой скорости вращения вед.колеса. Выражение для опр. υд запишется так: rкинωк=υт-υд=υт(1-δ)=rдωк(1-δ), откуда rкин=rд(1-δ) rд динамический радиус. Проанализируем получ.выраж.При δ=0 rкин=rд, т.е. колесо катится без буксования.При δ=1 rкин=0.Колесо буксует, т.е. вращается, но не двигается с места,т.к. υд=rкинωк=0.При 0<δ<1 rкин=rд(1-δ).Колесо буксует, но движется со скоростью υд=υт(1-δ). 4. Теоретическая скорость Vт=2πRзn/(60IoIк). Буксование на твердой дороге: Рк<Рсц→Кб=0 Vд=Vт; Мк /Rз>Рсц Кб=1 Vд=0, Буксование на деформ пов-ти: Факторы, влияющие на величину буксования: 1.Тип и сост опорной пов-ти. 2.Нормальная нагрузка на колесо. 3.Нагрузка на крюке (уплотнение почвы->уплотнение сопровождается сдвигом->чистый сдвиг-кривая идет вверх). кол.→Кбдоп=0,16-0,18, гус.→Кбдоп=0,05.
2. Ведущий момент на колесе. Ист мех энергии-ДВС-колен вал с кот сним Ne через трансм на колеса Nк. Nе>Nк т.к.Nк=Ne–Nтр, Кпдтр=Nк/Ne=Мкωк/(Меωдв), ωдв/ωк=Iтр, Кпдтр= Мк/(МеIтр), Мк = МеIтрКпдтр. Nе↑ Ме↓. Крутящий момент двигателя: Мдв=Ме установившийся режим (n=const), Мдв=Ме-Iдвεдв неустановившийся режим (n≠const) Iдв-момент инерции вращающихся масс двигателя, εдв-угловое ускорение коленвала двигателя
Если ε<0, то Мдв > Me. Мк = МдвIoIкКпдтр, Ме=9,55Ne/n. К=Меmax/Meн коэффиц приспособляемости 1,3…1,4 – карб. 1,1…1,2 – дизель Кф=Мфmax/Mен коэффициент запаса сцепления, Кф =2,0…3,0 тракторы, Кф=1,8…2,5–грузовые автомобили. Если Мдв>Мфmax – сцепление буксует, Передаточное число трансмиссии: Iтр=ωдв/ωк=IoIк, Io передаточное число главной передачи, Iо=3…10–автомобили, Io=10…25–тракторы: Iтр>1→Mк>Me. Механический кпд трансмиссии: Кпдтр=Nк/Ne=КпдхКпдцnцКпдкnк Кпдх=0,96–учитывает потери на трение в подшипниках, гидрав. и аэродинамич. потери, Кпдц=0,985-кпд цилиндрической пары шестер. Кпдк=0,975–кпд конической пары шестерен. nц, nк–число цилиндр. и конич.пар шестерен, Кпдтр=0,83…0,93, Гидротрансформатор Кпдгт≤0,85
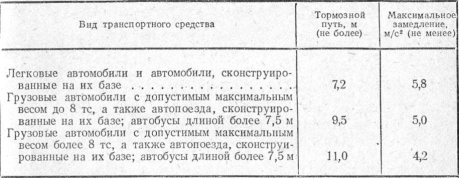
3. Измерители тормозных качеств автомобиля
Измерителем интенсивности торможения является коэффициент vт удельной тормозной силы:
![]()
При выборе СИ учитывают совокупность метрологических (цена деления, погрешность, пределы измерения), эксплуатационных и экономических показаний, к которым относятся массовость (повторяемость измеряемых размеров) и доступность их для контроля, стоимость и надёжность, метод измерения; время, затрачиваемое на измерение массы, размеров, рабочая нагрузка; жесткость объекта контроля, шероховатость его поверхности; режим работы и.т.д.
Наиболее подходящими для контроля эффективности тормозных систем являются следующие приборы: ЭФФЕКТ, диагностическая линия Spesial 3.2 MSD, стационарный универсальный стенд контроля тормозных систем СТС-10У-СП-11.
Портативный измеритель ЭФФЕКТ является самым недорогим и рациональным средством для оценки параметров тормозных систем методом дорожных испытаний всех видов транспорта, включая сельхозмашины и троллейбусы. Сверхточные интегральные датчики ускорения и тензометрические датчики усилий измеряют и рассчитывают главные параметры эффективности торможения по стандартам безопасности ГОСТ Р51709
Эффективность действия рабочей тормозной системы оценивают по тормозному пути — расстоянию на горизонтальной сухой дороге с твердым покрытием, на котором происходит торможение автомобиля от скорости 30 км/ч до полной остановки. Этот параметр наряду с максимальным замедлением принят в СССР в качестве нормативного измерителя тормозных качеств автомобилей
4. Касательная сила тяги; двойственный характер силы тяги
Рк=Мк/Rз
Рк=МеIoIкКПДтр/Rз
а) Ркмах=МеIoIк1КПДтр/Rз
б) Ркмах<=Рсц Мкмах/Rз>Рсц -условие буксования
Ксц=Рсц/Рт зависит от: 1Тип и сост опорн. поверхн. 2 Твердость покр. 3 Деформируемость опрон. поверхн. 4 Давление возд. в шинах 5 Норм. нагр. на шину 6 Буксование, проскальзыван.
а) твердая дорога не дает колесу буксовать
- трение
-зацепление
Ксц=0,7….0,8 –легковой автомобиль
Ксц=0,08…0,05 – на льду
б) деформируемая поверхность Ксц=0,5…..0,6 трактор
-зацепление
-трение
5. Кинематика поворота гусеничного трактора
В гусеничном тракторе поворот обеспечивается тем, что механизм поворота создает различные скорости движения; гусеница, движущаяся с большой скоростью (забегающая гусеница), поворачивает трактор в сторону отстающей гусеницы.
Угловая скорость ωт вращения машины около оси поворота О может быть определена по формуле
![]()
где v´ — скорость точки От;
R — радиус поворота трактора.
Вращение гусеницы около оси О можно разложить на относительное вращение около полюсов вращения О1 и О2 (так называют в теории трактора проекции оси поворота на продольные плоскости симметрии гусениц) с угловой скоростью ωт и переносное поступательное движение со скоростями v2 и v1. Скорости прямолинейного поступательного движения гусениц v2 и v1 могут быть определены по формулам:
![]() (33.6)
(33.6)
![]() (33.7)
(33.7)
где v1 и v2 — соответственно скорости забегающей и отстающей гусеницы.
Полюсы O1 и O2 занимают положение, показанное на рис. 33.2, только при отсутствии буксования и скольжения гусениц. Буксование и скольжение гусениц приводит к поперечному смещению полюсов О1 и О2 от плоскости симметрии. Однако этим смещением полюсов практически можно пренебречь.
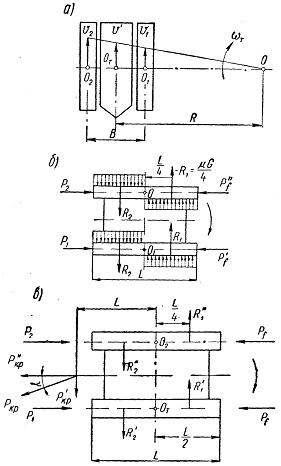
Рис. 33.2. Гусеничный трактор:
а — схема поворота; б — силы, действующие на трактор без прицепа; в — силы, действующие на трактор при повороте с прицепом
Рассмотрим простейший случай поворота гусеничного трактора при следующих допущениях: поворот происходит на горизонтальном участке с равномерной угловой скоростью, центробежная сила отсутствует, центр тяжести трактора лежит на пересечении осей симметрии опорной поверхности трактора; давление на опорные поверхности гусениц распределено равномерно; сила тяги на крюке Ркр равна нулю (рис. 33.2, б). На трактор в этом случае действуют: сила тяги Р2 на забегающей гусенице; сила тяги Р1 на отстающей гусенице; силы сопротивления движению Р´f и Р"f. Кроме того, в направлении, перпендикулярном направлению движения, действуют силы сопротивления повороту, которые можно считать пропорциональными массе трактора, приходящейся на единицу длины. Указанный коэффициент пропорциональности называется коэффициентом сопротивления повороту и обозначается буквой µ.
На
каждую гусеницу при принятых допущениях
приходится половина массы трактора
0,5 G, а на единицу длины опорной поверхности
приходится масса, равная
![]() .
Поэтому на единицу длины опорной
поверхности будет действовать сила
.
Поэтому на единицу длины опорной
поверхности будет действовать сила
![]()
Силы
сопротивления повороту можно заменить
их равнодействующими R1 и R2, каждая из
которых равна ![]() и
приложена на расстоянии
и
приложена на расстоянии![]()
от плоскости, в которой находятся полюсы вращения О1 и О2.
Сумма проекций всех сил, действующих на трактор при повороте на продольную ось,
![]()
Уравнение моментов относительно точки
![]() (33.8)
(33.8)
Уравнение моментов относительно точки О1:
![]() (33.9)
(33.9)
Правые части уравнений (33.8) и (33.9) называются моментом сопротивления поворота Мр, т. е.
![]() (33.10)
(33.10)
Из уравнений (33.8) и (33.9) можно получить выражения для сил тяги отстающей и забегающей гусениц:
![]() (33.11)
(33.11)
![]() (33.12)
(33.12)
считая, что
![]()
Анализ приведенных уравнений показывает, что силы тяги на забегающей и отстающей гусеницах зависят от коэффициента сопротивления повороту µ, длины опорной поверхности гусениц L и ширины колеи трактора В.
При повороте гусеничного трактора сила тяги забегающей гусеницы, как это видно из формул (33. 11) и (33.12), имеет положительное значение, т. е. силу тяги создает двигатель. Сила тяги отстающей гусеницы, как правило, имеет знак минус, т. е. сила тяги возникает при торможении гусеницы.
Улучшение
условий поворота гусеничного
трактора достигается,главным
образом, при уменьшении значения
![]() в
формулах (33.11) и (33.12), т. е. путем уменьшения
коэффициента сопротивления повороту
µ или уменьшения отношения
в
формулах (33.11) и (33.12), т. е. путем уменьшения
коэффициента сопротивления повороту
µ или уменьшения отношения![]() , т. е. увеличением ширины колеи трактора
по сравнению с длиной поверхности
гусеницы.
, т. е. увеличением ширины колеи трактора
по сравнению с длиной поверхности
гусеницы.
Коэффициент сопротивления повороту µ находится экспериментальным путем для определенных грунтов, формы обвода гусеничной цепи и ее звеньев, распределения давления по опорной поверхности и радиуса поворота.
Рассмотрим влияние силы тяги на крюке на поворот гусеничного трактора (рис. 33.2,б), принимая все ранее изложенные допущения, но учитывая только силу тяги Ркр. Составляющая сила тяги Р´кр создает момент Р´крi. В результате должно произойти смещение полюсов поворота гусениц О1 и О2 влево и, следовательно, изменятся эпюры сил сопротивления поворота (рис. 33.2,6). При равномерном распределении давления по опорной поверхности гусеницы удельное сопротивление повороту
будет
![]() а
сумма проекций всех сил на ось ординат
а
сумма проекций всех сил на ось ординат
![]() (33.13)
(33.13)
После подстановки соответствующих значений R1, R2 и Р´кр получим
![]() (33.14)
(33.14)
откуда
![]() (33.15)
(33.15)
Смещение полюсов поворота гусениц xо в процентном отношении составляет очень малую часть от длины опорной поверхности L. Поэтому вполне можно пренебречь величиной хо, и тогда расчетная схема будет иметь вид, представленный на рис. 33.2,в. Равнодействующие силы сопротивления повороту обеих гусениц
![]() (33.16)
(33.16)
Результирующий момент сопротивления повороту
![]() (33.17}
(33.17}
Сила тяги на отстающей и забегающей гусеницах с учетом силы тяги на крюке будет определяться по формулам:
![]() (33-18)
(33-18)
![]() (33.19)
(33.19)
Как следует из формулы (33.17), уменьшение результирующего момента при повороте трактора с нагрузкой на крюке может быть получено при применении такого устройства, которое обеспечивало бы положение шарнира прицепной тяги возможно ближе к середине опорных поверхностей гусениц. Такое прицепное устройство получило название маятникового прицепа.